驱动组件、有源外骨骼运动模组及有源外骨骼机器人的制作方法
1.本发明涉及外骨骼机器人技术领域,尤其涉及一种驱动组件、有源外骨骼运动模组及有源外骨骼机器人。
背景技术:
2.有源外骨骼机器人是集成了智能控制、传感、移动计算、信息等技术的人机一体化动力机械装备。有源外骨骼机器人的作用是为穿戴者的运动提供助力和防护,目前主要应用于军事、民用和工业领域。
3.可穿戴有源外骨骼设备主要包括外形框架、驱动系统、控制系统、传动系统、执行系统、感知系统和绑缚系统七个基本部分。通过绑缚系统连接,助力到作用对象,即穿戴外骨骼的人。
4.工作原理是由驱动装置施加力矩,通过与骨骼平行的杆件和与人体相连接的绑缚装置进行力的传递;位于人体肌肉运动部位的姿态传感器感知人体的运动信息、生理信号等,将信息实时反馈给控制系统,控制系统综合计算输入的信息并不断输出控制参数给驱动装置。
5.然而,现有的有源外骨骼助力方式主要为在关节处安装电机直接施加力矩或者通过钢绳等牵引机构进行助力。
6.这两种方式需要进行关节对位并根据不同体型的穿戴者进行尺寸调整,这就造成了组装、穿戴繁琐,用户学习成本高,设备整体尺寸较大,配置不够灵活。在人体关节往复运动时,这些方式往往需要电机迅速变换方向以满足人体一定的运动频率,现有的技术条件很难达到理想的效果。
7.因此,针对上述问题,有必要提出进一步的解决方案。
技术实现要素:
8.本发明的目的在于提供一种驱动组件、有源外骨骼运动模组及有源外骨骼机器人,以克服现有技术中存在的不足。
9.为实现上述发明目的,本发明提一种驱动组件,其包括:电机、连杆以及配重块;所述电机的输出端与所述连杆的一端垂直连接,所述配重块与所述连杆的另一端相连接,所述电机能够通过所述连杆带动所述配重块进行非匀速圆周运动。
10.作为本发明驱动组件的改进,所述驱动组件还包括一外壳,所述驱动组件收容于所述外壳中,所述外壳靠近所述电机的一端的内侧壁设置有内螺纹,所述外壳靠近所述配重块的一端的外侧壁设置有外螺纹。
11.为实现上述发明目的,本发明提一种有源外骨骼运动模组,其包括:本体、电池、主控板、姿态传感器以及如上所述的至少一个驱动组件;所述电池、主控板、姿态传感器以及驱动组件集成于所述本体上;所述电池为所述主控板、姿态传感器以及驱动组件供电;
所述姿态传感器能够识别所述有源外骨骼运动模组所助力的肢体的运动规律,并得出所述运动规律对应的助力轨迹;所述主控板控制所述驱动组件按照所述助力轨迹提供对应的助力。
12.作为本发明有源外骨骼运动模组的改进,所述驱动组件集成于所述本体一面的中间位置,所述电池、主控板、姿态传感器嵌入于所述本体中。
13.作为本发明有源外骨骼运动模组的改进,所述本体的另一面还设置有绑腹带。
14.作为本发明有源外骨骼运动模组的改进,所述驱动组件为多个时,多个驱动组件通过其两端的螺纹依次组装连接,且各驱动组件保持同轴设置。
15.作为本发明有源外骨骼运动模组的改进,所述有源外骨骼运动模组还包括一启动开关,所述启动开关控制所述电源的开启和关闭。
16.为实现上述发明目的,本发明提一种有源外骨骼机器人,其包括如上所述的有源外骨骼运动模组。
17.与现有技术相比,本发明的有益效果是:本发明的有源外骨骼运动模组通过电机控制配重块进行非匀速圆周运动产生不同方向和大小的向心力,为所在肢干提供助力,不会影响到穿戴者本身的关节自由度,穿戴舒适感强。
18.本发明的有源外骨骼运动模组不需要进行关节对位和尺寸调节,直接绑缚在需要助力的肢干即可,其结构简单、使用方便。该模组配置方式十分灵活,可以对单个肢干进行助力,也可以多个肢干安装进行组合助力,不需要依赖负载的外骨骼系统。且模组化设计,也有利于降低制造成本。
19.本发明的有源外骨骼运动模组在对人体往复运动进行助力时,电机始终朝一个方向做变速运动,不会因为频繁切换方向带来迟滞和能量损耗,该方式也更加适用于穿戴者高速运动的场合。
20.本发明的有源外骨骼运动模组的助力大小可以通过增减驱动组件的数量进行,便于用户针对不同的场景进行不同的配置,使用灵活方便,不会因为系统较大的助力上限而造成系统自重增加。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
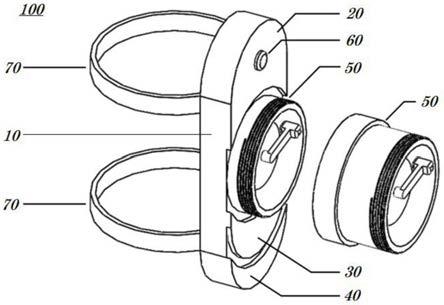
22.图1为本发明外骨骼机器人一实施例中有源外骨骼运动模组的立体示意图;图2为图1所示有源外骨骼运动模组中电机、连杆以及配重块的立体放大示意图。
具体实施方式
23.下面结合各实施方式对本发明进行详细说明,但应当说明的是,这些实施方式并非对本发明的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本发明的保护范围之内。
24.本发明一实施例提供一种外骨骼机器人,其包括:上肢机构、下肢机构以及安装于上肢机构、下肢机构上的有源外骨骼运动模组。上肢机构、下肢机构可被穿戴于人体的肢体上,有源外骨骼运动模组为所在的肢体机构助力时的动力。
25.如图1所示,有源外骨骼运动模组100包括:本体10、电池20、主控板30、姿态传感器40以及至少一个驱动组件50。
26.电池20、主控板30、姿态传感器40以及驱动组件50集成于本体10上。电池20与主控板30、姿态传感器40以及驱动组件50电连接,进而电池20为主控板30、姿态传感器40以及驱动组件50供电。此外,有源外骨骼运动模组还包括一启动开关60,启动开关60控制电源的开启和关闭。
27.一个实施方式中,驱动组件50集成于本体10一面的中间位置,电池20、主控板30、姿态传感器40嵌入于本体10中。此外,为了便于使用者的穿戴,本体10的另一面还设置有绑腹带70。
28.如图2所示,驱动组件50包括:电机51、连杆52以及配重块53。其中,电机51的输出端与连杆52的一端垂直连接,配重块53与连杆52的另一端相连接,电机51能够通过连杆52带动配重块53进行非匀速圆周运动。为了使得电机51能够带动配重块53进行非匀速圆周运动,电机51的输出功率是非恒定的。
29.如此,当电机51朝一个方向做变速运动时,与之传动连接的配重块53能够进行非匀速圆周运动,从而产生不同方向、不同大小的向心力,进而为所在肢干提供助力,不会影响到穿戴者本身的关节自由度,穿戴舒适感强。此外,由于电机51始终朝一个方向做变速运动,不会因为频繁切换方向带来迟滞和能量损耗,该方式也更加适用于穿戴者高速运动的场合。
30.同时,由于不采用传统的在关节处安装电机51直接施加力矩或者通过钢绳等牵引机构进行助力,本实施例的有源外骨骼运动模组不需要进行关节对位和尺寸调节,直接绑缚在需要助力的肢干即可,其结构简单、使用方便。该模组配置方式十分灵活,可以对单个肢干进行助力,也可以多个肢干安装进行组合助力,不需要依赖负载的外骨骼系统。且模组化设计,也有利于降低制造成本。
31.当驱动组件50被配置为多个时,为了便于多个驱动组件50的组装连接,驱动组件50还包括一外壳,驱动组件50收容于外壳中,且距离所在外壳的两端均保持一定的距离,以便于后续多个驱动组件50组装时不会发生干涉。外壳靠近电机51的一端的内侧壁设置有内螺纹,外壳靠近配重块53的一端的外侧壁设置有外螺纹。此时,多个驱动组件50通过其两端的螺纹依次组装连接,且各驱动组件50保持同轴设置。
32.如此,本实施例的有源外骨骼运动模组的助力大小可以通过增减驱动组件50的数量进行,便于用户针对不同的场景进行不同的配置,使用灵活方便,不会因为系统较大的助力上限而造成系统自重增加。
33.姿态传感器40用于采集模组所在肢干的姿态信息,分析肢干的运动情况。主控板30用于采集姿态传感器40数据,并控制驱动组件50按照根据姿态传感器40数据计算得到的助力轨迹提供对应的助力。
34.其中,姿态传感器40可测得所在肢干的俯仰角、横滚角、航向角,进而姿态传感器40在肢干做周期运动时,可根据前几个周期的姿态角预测出后续的运动情况。助力轨迹在
相位上超前于预测的肢干运动轨迹。对于电机而言与控制电机的加速度相对应,且根据牛顿第二定律可得到不同方向的力。
35.本实施例的外骨骼机器人工作时,首先打开启动开关,此时驱动组件不运行,人体运动时姿态传感器记录并分析肢干运动规律并得出助力轨迹。之后,驱动组件按照助力轨迹控制配重进行非匀速圆周运动,得到不同方向和大小的向心力,该力为肢干提供助力。
36.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
37.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1