一种电池搬运机械手的制作方法
1.本发明涉及传动技术领域,尤其涉及一种电池搬运机械手。
背景技术:
2.在电池生产过程中,通常需要对电池进行扫码、搬送等操作,人力搬送电池途中,直接接触电池本体,容易刮伤电池,导致电池的不良率高,且电池位置摆放不准确,效率低,难以有效的控制由人为因素而造成的不确定性。最好的改进方向是自动化设备,它能代替人的繁重劳动,能在工作环境复杂的场合工作且稳定。
技术实现要素:
3.本发明的目的在于针对现有技术的不足而提供一种搬动电池搬运机械手,通过机械搬送电池而取代人工搬送,从而提高生产效率,优化电池品质,更有利于生产自动化。
4.本发明所述的一种电池搬运机械手,其特征在于,包括:
5.支撑基座,所述支撑基座的底部固定安装于安装面上,用于水平支撑横向移动机构;
6.横向移动机构,水平架装于所述支撑基座的上方,用于驱动电池搬运机械手沿着横向水平移动,包括横向连接部和横向驱动部,所述横向连接部水平支撑在所述支撑基座的顶部,所述横向驱动部可滑动地安装在所述横向连接部上,并且横向驱动部的活动端与纵向移动机构连接,用于带动纵向移动机构沿着横向水平移动;
7.纵向移动机构,设置于所述横向移动机构上,包括纵向连接部和纵向驱动部,所述纵向连接部竖直安装于所述横向驱动部的活动端;所述纵向驱动部可滑动地安装在所述纵向连接部上,其升降端安装夹持机构,用于带动夹持机构沿着纵向移动;
8.夹持机构,设置于所述纵向移动机构上,包括固定板、承载板以及吸盘组件,所述固定板安装于纵向驱动部的升降端,用于带动承载板沿着纵向竖直移动;所述承载板安装在固定板上,用于带动吸盘组件进行上下工作;所述吸盘组件安装在承载板上,用于夹取电池实现电池的搬运;
9.以及控制器,其控制端与夹持机构的控制端信号连接,用于控制夹持机构夹紧或放松电池。
10.进一步,所述支撑基座包括两根支撑型材,所述支撑型材竖直固定于安装面上,所述支撑型材的顶部分别安装于所述横向移动机构的横向连接部两端部,用于共同承载横向移动机构。
11.进一步,所述横向连接部为一水平连接在支撑基座上的横向连接板,所述横向连接板水平架装在支撑基座的两根支撑型材顶部;
12.所述横向驱动部包括横向驱动电机、横向导轨、至少一块横向滑块和第一传感器;所述横向驱动电机是动力部件,安装在所述横向导轨上,且所述横向驱动电机的控制端与所述控制器的控制端信号连接,用于提供横向的驱动力;所述横向导轨水平铺装在所述横
向连接板上,为电池搬运机械手沿横向水平移动进行导向;所述横向滑块可滑动地安装于所述横向导轨上,并沿所述横向导轨轴向滑动;所述横向滑块与所述横向驱动电机的动力输出端固定连接,使得横向滑块在横向驱动电机的带动下沿横向导轨轴向直线往复移动;定义横向为横向导轨的轴向;每块所述横向滑块上均安装一套所述第一传感器,且所述第一传感器的信号输出端与所述控制器的信号输入端信号连接,用于检测所述纵向移动机构的位置。当横向驱动电机动作时,带动横向滑块在横向导轨上水平移动,进而带动纵向移动机构在横向水平移动,进而带动夹持机构沿着横向水平移动,最终达到电池搬运机械手沿横向水平移动的目的。
13.进一步,每块所述横向滑块上安装一套所述纵向移动机构,其中所述纵向移动机构的纵向连接部为一纵向连接板,所述纵向连接板竖直安装在横向移动机构的横向滑块上,用于连接纵向移动机构的其他部件;
14.所述纵向驱动部包括纵向驱动气缸、纵向导轨和纵向滑块,所述纵向驱动气缸是动力部件,安装在纵向连接板上,并保持所述纵向驱动气缸的升降端沿竖直方向伸缩,且所述纵向驱动气缸的控制端与所述控制器的控制端信号连接,用于推动纵向滑块在纵向导轨上垂直移动;所述纵向导轨竖直安装于纵向连接板上,为电池搬运机械手沿纵向垂直移动进行导向;所述纵向滑块可滑动地安装于所述纵向导轨上,并与所述纵向驱动气缸的升降端固定连接,使得纵向滑块在气缸带动下沿纵向导轨轴向直线往复移动;定义纵向为纵向导轨的轴向。当气缸动作时,带动纵向滑块在纵向导轨垂直移动,进而带动夹持机构在纵向垂直移动,最终达到电池搬运机械手沿纵向移动的目的。
15.进一步,所述夹持机构还包括加强筋,所述加强筋为一块三角板,连接在所述承载板和所述连接板之间,用于增加两者之间的强度。
16.进一步,所述吸盘组件包括推动板、l形连接件和吸盘部件,所述推动板安装于纵向连接板上,用于推动气缸的动作;所述l形连接件有四个,分别为第一l形连接件、第二l形连接件、第三l形连接件、第四l形连接件,所述第一l形连接件固定安装在所述固定板上;所述第二l形连接件固定安装于纵向连接板上,所述第二l 形连接件上设有供所述纵向驱动气缸通过的卡口;所述第三l形连接件共两套,分别固定安装于所述承载板的对端底部;所述第四l形连接件共两套,分别通过弹簧悬装于相应所述第三l形连接件的底部,用于防止两者之间相撞,起到缓冲作用;所述吸盘部件包括吸盘、气管接头组件和吸盘保护板,所述吸盘固定安装于所述第四l形连接件的底部,并且所述吸盘的吸附盘面对准电池,用于吸取在电池表面;所述气管接头组件安装于所述承载板的两端部,所述吸盘通过所述气缸接头组件与外部气源管路连通,用于在吸盘的吸附盘面与电池表面之间形成负压;所述吸盘保护板围设于所述吸盘的吸附盘面周围,用于保护所述吸盘。
17.进一步,所述吸盘组件还包括防撞检测部件,所述防撞检测部件包括缓冲单元、防撞导轨、防撞滑块和第二传感器,所述缓冲单元安装于所述纵向连接板上,并且所述缓冲单元的缓冲头对准所述第一l 形连接件;所述防撞导轨竖向安装于所述第三l形连接件上,其上滑动设置所述防撞滑块;所述防撞滑块与所述第四l形连接件固定连接,在防撞导轨与防撞滑块的共同作用下,第四l形连接件垂直滑动,进而带动吸盘部件进行垂直滑动;所述第二传感器设置在第三l形连接件上,其信号输出端与所述控制器的信号输入端信号连接,用于检测纵向移动机构的纵向位移,若纵向移动机构下降过多,进入传感器量程范围,机器便
会报警,可以有效避免对机器、电池造成的损害。
18.本发明的有益效果是:通过机械搬送电池而取代人工搬送,从而提高生产效率,优化电池品质,更有利于生产自动化;设备设置有防撞检测部件,可以检测纵向移动机构下降位移,若下降过多进入传感器量程范围,机器便会报警,可以有效避免对机器、电池造成的损害。
附图说明
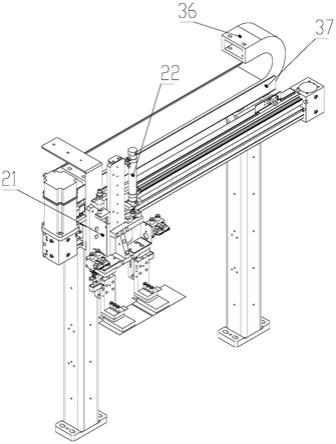
19.图1为本发明的结构图。
20.图2为本发明的纵向移动机构的结构图。
21.图3为本发明的纵向移动机构的左视图。
22.图4为本发明的横向移动机构的结构图。
23.图5为本发明的横向移动机构部分部件结构图。
24.图6为本发明的夹持机构的结构图。
25.图7为本发明的夹持机构的吸盘组件侧视图。
26.图8为本发明的吸盘组件的防撞检测部件的右视图。
具体实施方式
27.下面结合附图进一步说明本发明。
28.参照附图:
29.实施例1本发明所述的一种电池搬运机械手,包括:
30.支撑基座1,所述支撑基座1的底部固定安装于安装面上,用于水平支撑横向移动机构;
31.横向移动机构3,水平架装于所述支撑基座的上方,用于驱动电池搬运机械手沿着横向水平移动,包括横向连接部和横向驱动部,所述横向连接部水平支撑在所述支撑基座的顶部,所述横向驱动部可滑动地安装在所述横向连接部上,并且横向驱动部的活动端与纵向移动机构连接,用于带动纵向移动机构2沿着横向水平移动;
32.纵向移动机构2,设置于所述横向移动机构上,包括纵向连接部和纵向驱动部,所述纵向连接部竖直安装于所述横向驱动部的活动端;所述纵向驱动部可滑动地安装在所述纵向连接部上,其升降端安装夹持机构,用于带动夹持机构4沿着纵向移动;
33.夹持机构4,设置于所述纵向移动机构上,包括固定板41、承载板42以及吸盘组件44,所述固定板41安装于纵向驱动部的升降端,用于带动承载板42沿着纵向竖直移动;所述承载板42安装在固定板 41上,用于带动吸盘组件44进行上下工作;所述吸盘组件44安装在承载板42上,用于夹取电池实现电池的搬运;
34.以及控制器,其控制端与夹持机构的控制端信号连接,用于控制夹持机构夹紧或放松电池。
35.所述支撑基座1是基准支撑部件,包括两根支撑型材,所述支撑型材竖直固定于安装面上,所述支撑型材的顶部分别安装于所述横向移动机构的横向连接部两端部,用于共同承载横向移动机构。
36.所述横向移动机构3水平设置于支撑基座1上,用于驱动电池搬运机械手沿着横向
水平移动,其中:所述横向连接部为一水平连接在支撑基座上的横向连接板31,所述横向连接板31水平架装在支撑基座的两根支撑型材顶部,用于连接横向移动机构3的其他部件;
37.所述横向驱动部包括横向驱动电机32、横向导轨33、两块横向滑块34和第一传感器35;所述横向驱动电机32是动力部件,安装在所述横向导轨33上,且所述横向驱动电机32的控制端与所述控制器的控制端信号连接,用于提供横向的驱动力;所述横向导轨33水平铺装在所述横向连接板31上,为电池搬运机械手沿横向水平移动进行导向;两块所述横向滑块34并排可滑动地安装于所述横向导轨 33上,并沿所述横向导轨33轴向滑动,并且所述横向滑块34与所述横向驱动电机32的动力输出端固定连接,使得横向滑块34在横向驱动电机32的带动下沿横向导轨33轴向直线往复移动;定义横向为横向导轨的轴向;每块所述横向滑块34上均安装一套所述第一传感器35,且所述第一传感器35的信号输出端与所述控制器的信号输入端信号连接,用于检测所述纵向移动机构2的位置。当横向驱动电机 32动作时,带动横向滑块34在横向导轨33上水平移动,进而带动纵向移动机构2在横向水平移动,进而带动夹持机构4沿着横向水平移动,最终达到电池搬运机械手沿横向水平移动的目的。
38.所述横向驱动部还包括拖链36和拖链槽37,所述拖链槽37沿横向平行设置于所述横向导轨33旁;所述拖链36装于所述拖链槽 37内,所述拖链36的拖动端与所述横向滑块34相连。
39.每块所述横向滑块34上安装一套所述纵向移动机构2,其中所述纵向移动机构2的纵向连接部为一纵向连接板21,所述纵向连接板21竖直安装在横向移动机构3的横向滑块34上,用于连接纵向移动机构的其他部件;
40.所述纵向驱动部包括纵向驱动气缸22、纵向导轨23和纵向滑块 24,所述纵向驱动气缸22是动力部件,安装在纵向连接板21上,并保持所述纵向驱动气缸22的升降端沿竖直方向伸缩,且所述纵向驱动气缸22的控制端与所述控制器的控制端信号连接,用于推动纵向滑块24在纵向导轨23上垂直移动;所述纵向导轨23竖直安装于纵向连接板21上,为电池搬运机械手沿纵向垂直移动进行导向;所述纵向滑块24可滑动地安装于所述纵向导轨23上,并与所述纵向驱动气缸22的升降端固定连接,使得纵向滑块24在纵向驱动气缸22带动下沿纵向导轨23轴向直线往复移动;定义纵向为纵向导轨的轴向。当纵向驱动气缸22动作时,带动纵向滑块24在纵向导轨23垂直移动,进而带动夹持机构4在纵向垂直移动,最终达到电池搬运机械手沿纵向移动的目的。
41.所述夹持机构4还包括加强筋43,所述加强筋43为一块三角板,连接在所述承载板42和所述连接板41之间,用于增加两者之间的强度。
42.所述吸盘组件44包括推动板441、l形连接件442和吸盘部件 443,所述推动板441安装于纵向连接板21上,用于推动纵向驱动气缸22的动作;所述l形连接件442有四个,分别为第一l形连接件 4421、第二l形连接件4422、第三l形连接件4423和第四l形连接件4424,所述第一l形连接件4421固定安装在所述固定板41上;所述第二l形连接件4422固定安装于纵向连接板21上,所述第二l 形连接件4422上设有供所述纵向驱动气缸22通过的卡口;所述第三 l形连接件4423共两套,分别固定安装于所述承载板42的对端底部;所述第四l形连接件4424共两套,分别通过弹簧悬装于相应所述第三l形连接件4423的底部,用于防止两者之间相撞,起到缓冲作用;所述吸盘部件443包括吸盘4431、气管接头组件4433和吸盘保护板 4432,所述吸盘4431固定安装于所述第四l形连接件4424的底部,并且所述吸盘4431的
吸附盘面对准电池,用于吸取在电池表面;所述气管接头组件4433安装于所述承载板42的两端部,所述吸盘4431 通过所述气缸接头组件4433与外部气源管路连通,用于在吸盘的吸附盘面与电池表面之间形成负压;所述吸盘保护板4432围设于所述吸盘4431的吸附盘面周围,用于保护所述吸盘。
43.所述吸盘组件443还包括防撞检测部件444,所述防撞检测部件 444包括缓冲单元4441、防撞导轨4442、防撞滑块4443和第二传感器4444,所述缓冲单元4441安装于所述纵向连接板21上,并且所述缓冲单元4441的缓冲头对准所述第一l形连接件4421;所述防撞导轨4442竖向安装于所述第三l形连接件4423上,其上滑动设置所述防撞滑块4443;所述防撞滑块4443与所述第四l形连接件4424 固定连接,在防撞导轨4442与防撞滑块4443的共同作用下,第四l 形连接件4424垂直滑动,进而带动吸盘部件进行垂直滑动;所述第二传感器4444设置在第三l形连接件4423上,其信号输出端与所述控制器的信号输入端信号连接,用于检测纵向移动机构的纵向位移,若纵向移动机构下降过多,进入传感器量程范围,机器便会报警,可以有效避免对机器、电池造成的损害。
44.本说明书实施例所述的内容仅仅是对发明构思的实现形式的列举,本发明的保护范围不应当被视为仅限于实施例所陈述的具体形式,本发明的保护范围也包括本领域技术人员根据本发明构思所能够想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1