黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法
1.本发明涉及机器人控制技术领域,尤其涉及的是一种黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法。
背景技术:
2.近年来,随着优化问题在现实生活中变得越来越复杂,使用传统的基于梯度的方法来解决这类问题变得越来越困难。因此,人们对求解问题的算法的稳定性和可靠性的要求也越来越高。因此,群智能算法作为一种模拟昆虫、动物、鸟类和鱼类的群体行为的算法,被广泛应用于解决这类问题。由于群智能算法的简单、高效和低计算复杂度,许多研究者提出了很多先进的群智能算法,如连续蚁群优化算法、蝙蝠优化算法、差分进化算法、萤火虫优化算法、飞蛾优化算法、粒子群优化算法、正余弦优化算法、樽海鞘群优化算法、果蝇优化算法等。此外,还有一种群智能算法,称为多元宇宙优化算法,该算法具有很强的解决最优方案的能力。因此,已经有许多研究者提出了许多多元宇宙优化算法的改进版本,并将其应用到了各个领域。
3.现有技术中,在群体机器人(包括无人机等)控制技术领域,由于多元宇宙优化算法有限的搜索能力和较慢的收敛速度,使求解易陷入局部最小值,导致群体机器人控制效率较低。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法,旨在解决现有技术中群体机器人控制效率较低的问题。
6.本发明解决技术问题所采用的技术方案如下:
7.一种黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法,其中,包括步骤:
8.获取群体机器人中各机器人的初始位置,并根据所述机器人的初始位置,确定所述机器人的多元宇宙种群;其中,所述多元宇宙种群包括多个宇宙;
9.基于多元宇宙算法,根据所述机器人的多元宇宙种群和优化参数,确定各宇宙中所述机器人的一次更新位置向量;
10.基于黏菌觅食行为模型,根据各宇宙中所述机器人的一次更新位置向量,确定各宇宙中所述机器人的二次更新位置向量;
11.当所述机器人的二次更新位置向量满足预设条件时,根据各宇宙中所述机器人的二次更新位置向量,确定所述机器人的输出位置向量。
12.所述的控制方法,其中,所述控制方法还包括:
13.当所述机器人的二次更新位置向量不满足预设条件时,通过所有宇宙中所述机器人的二次更新位置向量形成所述机器人的多元宇宙种群,并继续执行基于多元宇宙算法,
根据所述机器人的多元宇宙种群和优化参数,确定各宇宙中所述机器人的一次更新位置向量的步骤,直至所述机器人的二次更新位置向量满足预设条件。
14.所述的控制方法,其中,所述宇宙包括群体机器人中各机器人的位置向量,所述优化参数包括:虫洞存在的概率以及旅行距离值;其中,所述虫洞存在的概率根据当前迭代次数和最大迭代次数确定,所述旅行距离值根据当前迭代次数、最大迭代次数以及利用程度确定;
15.所述基于多元宇宙算法,根据所述机器人的多元宇宙种群和优化参数,确定各宇宙中所述机器人的一次更新位置向量,包括:
16.针对多元宇宙种群中每个宇宙,确定该宇宙的适应度值;
17.根据各宇宙的适应度值,确定最优宇宙;
18.根据各宇宙中所述机器人的位置向量,通过白洞/黑洞轨道转移,得到各宇宙中所述机器人的转移位置向量;
19.根据各宇宙中所述机器人的初始位置、所述机器人的转移位置向量、所述虫洞存在的概率、所述旅行距离值以及所述最优宇宙,得到各宇宙中所述机器人的一次更新位置向量。
20.所述的控制方法,其中,所述机器人的转移位置向量为:
[0021][0022]
其中,表示第i个宇宙的第j个机器人的转移位置向量,表示第i个宇宙的第j个机器人的位置向量,r1表示[0,1]范围内的随机数,ni(u
i
)表示第i个宇宙的归一化适应度值,表示由轮盘机制选择的第k个宇宙的第j个机器人的位置向量。
[0023]
所述的控制方法,其中,所述机器人的一次更新位置向量为:
[0024][0025][0026][0027]
其中,表示第i个宇宙的第j个机器人的一次更新位置向量,x
j
表示最优宇宙中第j个机器人的位置向量,tdr表示旅行距离值,ub
j
表示的上限,lb
j
表示的下限,wep表示虫洞存在的概率,r2,r3,r4均表示[0,1]范围内的随机数,wep
min
表示虫洞存在的最小概
率,wep
max
表示虫洞存在的最大概率,t表示当前迭代次数,t表示最大迭代次数,p表示利用程度。
[0028]
所述的控制方法,其中,所述机器人的二次更新位置向量为:
[0029][0030]
q=tanh|s(i)
‑
df|
[0031][0032][0033][0034]
其中,表示第i个宇宙的第j个机器人的二次更新位置向量,rand,r均表示[0,1]范围内的随机数,lb表示的下限,ub表示的上限,z表示整数集合,表示历次迭代中最高适应度值的宇宙中的对应机器人的位置向量,表示从0到1线性递减值,表示第i个宇宙的权重,分别表示从群体机器人中随机挑选的两个机器人的位置向量,表示从1到0线性递减值,q表示中间变量,s(i)表示第i个宇宙的适应度值,df表示历次迭代中宇宙的最高适应度值,a表示参数,bf表示当前迭代中宇宙的最高适应度值,wf表示当前迭代中宇宙的最低适应度值。
[0035]
所述的控制方法,其中,所述预设条件包括:当前迭代次数达到最大迭代次数,或者迭代时间达到终止时间。
[0036]
所述的控制方法,其中,所述当所述机器人的二次更新位置向量满足预设条件时,根据各宇宙中所述机器人的二次更新位置向量,确定所述机器人的输出位置向量,包括:
[0037]
当所述机器人的二次更新位置向量满足预设条件时,确定各宇宙的适应度值;
[0038]
将适应度值最大的宇宙中所述机器人的二次更新位置向量作为所述机器人的输出位置向量。
[0039]
一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其中,所述处理器执行所述计算机程序时实现上述任一项所述方法的步骤。
[0040]
一种计算机可读存储介质,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现上述任一项所述的方法的步骤。
[0041]
有益效果:采用黏菌觅食行为的方式来改进多元宇宙优化算法中白洞和黑洞的运动方式,在白洞和黑洞根据多元宇宙优化算法的运动规则完成自己的运动之后,再根据黏菌觅食行为进一步在局部最优和全局最优之间寻求最优解,且确保收敛速度较快,从而提高了群体机器人控制效率。
附图说明
[0042]
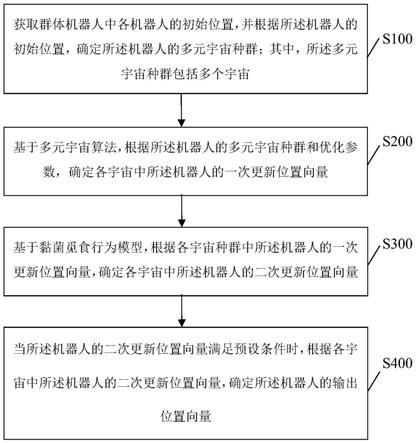
图1是本发明黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法的第一流程图。
[0043]
图2是本发明黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法的第二流程图。
[0044]
图3是本发明中改进的多元宇宙优化算法与一些同类算法的弗里德曼检验结果示意图。
[0045]
图4是本发明中改进的多元宇宙优化算法与一些同类算法的收敛曲线。
具体实施方式
[0046]
为使本发明的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0047]
请同时参阅图1
‑
图4,本发明提供了一种黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法的一些实施例。
[0048]
为了解决有限的搜索能力和较慢的收敛速度,导致的机器人控制效率低问题,本发明提出了一种改进的多元宇宙优化算法。该算法主要是采用黏菌觅食行为的方式来改进多元宇宙优化算法中白洞和黑洞的运动方式,其中,黏菌觅食行为主要是作用在白洞和黑洞根据多元宇宙优化算法的运动规则完成自己的运动之后,再根据黏菌觅食行为进一步在局部最优和全局最优之间寻求最优解,且确保收敛速度较快,从而提高了群体机器人控制效率。
[0049]
如图1和图2所示,本发明实施例的一种黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法,包括以下步骤:
[0050]
步骤s100、获取群体机器人中各机器人的初始位置,并根据所述机器人的初始位置,确定所述机器人的多元宇宙种群;其中,所述多元宇宙种群包括多个宇宙。
[0051]
具体地,在多元宇宙优化算法中,一个宇宙被视为优化问题的解决方案,单个宇宙中的每个物体被视为相应解决方案的机器人的位置向量,宇宙的膨胀率与相应解决方案的适配度成正比。解决方案的初始化用于启动优化过程,对解决方案的每一组更新都通过渐进式迭代规则执行。多宇宙种群的随机初始化u被定义为公式(1)。
[0052]
[0053]
其中,n表示宇宙的数量,对应于宇宙种群规模。d表示机器人的数量,对应于搜索空间的维度。表示第i个宇宙,表示第i个宇宙的第j个机器人的位置向量。第i个宇宙的第j个机器人的位置向量根据第j个机器人的初始位置确定,具体地,由于机器人自初始位置移动,移动方向有多个,根据机器人的初始位置和移动方向,得到该机器人的位置向量。不同宇宙中同一机器人的移动方向可以相同,也可以不相同。
[0054]
步骤s200、基于多元宇宙算法,根据所述机器人的多元宇宙种群和优化参数,确定各宇宙中所述机器人的一次更新位置向量。
[0055]
具体地,所述宇宙包括群体机器人中各机器人的位置向量。基于多元宇宙算法,根据多元宇宙种群和优化参数,确定各宇宙种群中机器人的一次更新位置向量,也就是说,基于多元宇宙算法,对多元宇宙种群进行优化,得到一次优化的多元宇宙种群,即是,对多元宇宙种群中各机器人的位置向量进行第一次更新得到一次更新位置向量。
[0056]
具体地,优化参数是指多元宇宙算法进行优化时所用到的参数,所述优化参数包括:虫洞存在的概率以及旅行距离值;其中,所述虫洞存在的概率根据当前迭代次数和最大迭代次数确定,所述旅行距离值根据当前迭代次数、最大迭代次数以及利用程度确定。虫洞存在的概率是指多元宇宙种群中虫洞存在的概率,旅行距离值是指机器人的位置向量朝最优宇宙移动的步长。
[0057]
步骤s200具体包括:
[0058]
步骤s210、针对多元宇宙种群中每个宇宙,确定该宇宙的适应度值。
[0059]
步骤s220、根据各宇宙的适应度值,确定最优宇宙。
[0060]
具体地,针对每个宇宙,确定该宇宙的适应度值,将宇宙种群中适应度值最大的宇宙作为最优宇宙。
[0061]
步骤s230、根据各宇宙中所述机器人的位置向量,通过白洞/黑洞轨道转移,得到各宇宙中所述机器人的转移位置向量。
[0062]
具体地,由于每个单独的宇宙有不同的适应度值(膨胀率),更新过程遵循轮盘机制,单个宇宙中的机器人的位置向量通过白洞/黑洞轨道转移。
[0063]
所述机器人的转移位置向量为:
[0064][0065]
其中,表示第i个宇宙的第j个机器人的转移位置向量,表示第i个宇宙的第j个机器人的位置向量,r1表示[0,1]范围内的随机数,ni(u
i
)表示第i个宇宙的归一化适应度值,表示由轮盘机制选择的第k个宇宙的第j个机器人的位置向量。
[0066]
步骤s240、根据各宇宙中所述机器人的初始位置、所述机器人的转移位置向量、所述虫洞存在的概率、所述旅行距离值以及所述最优宇宙,得到各宇宙中所述机器人的一次更新位置向量。
[0067]
具体地,在不考虑膨胀率大小的情况下,为了实现局部变化,提高自身的适应度值
(膨胀率),宇宙会激发内部机器人的位置向量向当前最优宇宙移动。
[0068]
所述机器人的一次更新位置向量为:
[0069][0070][0071][0072]
其中,表示第i个宇宙的第j个机器人的一次更新位置向量,x
j
表示最优宇宙中第j个机器人的位置向量,tdr表示旅行距离值,ub
j
表示的上限,lb
j
表示的下限,wep表示虫洞存在的概率,r2,r3,r4均表示[0,1]范围内的随机数,wep
min
表示虫洞存在的最小概率,wep
min
可以根据需要设置,例如,wep
min
=0.2,wep
max
表示虫洞存在的最大概率,wep
max
可以根据需要设置,例如,wep
max
=1,t表示当前迭代次数,t表示最大迭代次数,p表示利用程度,p可以根据需要设置,例如,p=6。
[0073]
步骤s300、基于黏菌觅食行为模型,根据各宇宙中所述机器人的一次更新位置向量,确定各宇宙中所述机器人的二次更新位置向量。
[0074]
具体地,在得到一次优化的多元宇宙种群后,基于黏菌觅食行为模型对一次优化的多元宇宙种群进一步进行优化,得到二次优化的多元宇宙种群,即是,对一次优化的多元宇宙种群中各机器人的一次更新位置向量进行第二次更新得到二次更新位置向量。
[0075]
所述机器人的二次更新位置向量为:
[0076][0077]
q=tanh|s(i)
‑
df|
[0078][0079]
[0080][0081]
其中,表示第i个宇宙的第j个机器人的二次更新位置向量,rand,r均表示[0,1]范围内的随机数,lb表示的下限,ub表示的上限,z表示整数集合,表示历次迭代中最高适应度值的宇宙中的对应机器人的位置向量,表示从0到1线性递减值,表示第i个宇宙的权重,分别表示从群体机器人中随机挑选的两个机器人的位置向量,表示从1到0线性递减值,q表示中间变量,s(i)表示第i个宇宙的适应度值,df表示历次迭代中宇宙的最高适应度值,a表示参数,bf表示当前迭代中宇宙的最高适应度值,wf表示当前迭代中宇宙的最低适应度值。
[0082]
步骤s400、当所述机器人的二次更新位置向量满足预设条件时,根据各宇宙中所述机器人的二次更新位置向量,确定所述机器人的输出位置向量。
[0083]
具体地,所述预设条件包括:当前迭代次数达到最大迭代次数,或者迭代时间达到终止时间,所述机器人的二次更新位置向量的当前迭代次数达到最大迭代次数,或者所述机器人的二次更新位置向量的迭代时间达到终止时间时,根据各宇宙中所述机器人的二次更新位置向量,确定所述机器人的输出位置向量。也就是说后,机器人的二次更新位置向量满足预设条件后,从宇宙种群中确定最优宇宙,将最优宇宙中机器人的二次更新位置向量,作为机器人的输出向量。
[0084]
步骤s400具体包括:
[0085]
步骤s410、当所述机器人的二次更新位置向量满足预设条件时,确定各宇宙的适应度值。
[0086]
步骤s420、将适应度值最大的宇宙中所述机器人的二次更新位置向量作为所述机器人的输出位置向量。
[0087]
当机器人的二次更新位置向量满足预设条件时,确定宇宙的适应度值,将宇宙种群中适应度值最大的宇宙作为最优宇宙,并将最优宇宙中机器人的二次更新位置向量作为机器人的输出位置向量,以便控制机器人移动。
[0088]
步骤s500、当所述机器人的二次更新位置向量不满足预设条件时,通过所有宇宙中所述机器人的二次更新位置向量形成所述机器人的多元宇宙种群,并继续执行基于多元宇宙算法,根据所述机器人的多元宇宙种群和优化参数,确定各宇宙中所述机器人的一次更新位置向量的步骤,直至所述机器人的二次更新位置向量满足预设条件。
[0089]
具体地,所述机器人的二次更新位置向量不满足预设条件时,需要继续迭代,对机器人的位置向量继续更新。
[0090]
在改进的多元宇宙优化算法中,首先,所有机器人主要依靠多元宇宙优化算法自
身的白洞、黑洞、以及虫洞的运动方式来完成位置向量的第一次更新;在位置向量进行第一次更新之后,为了提高机器人避免陷入局部最优的能力,机器人通过模拟黏菌的觅食方式来寻找更好的位置,以此获得更优的适应度值。
[0091]
为了验证本发明方法的有效性,将其与其他算法在多个基准函数上进行了测试,结果表明,本发明专利提出的方法不仅可以获得更好的解,而且具有更快的收敛速度,提高了机器人的控制效率。
[0092]
在利用基准函数证明改进的多元宇宙优化算法性能的时候,选择了12个基准函数作为测试函数,表1展示了f1
‑
f12的详细信息。为了保证实验的相对公正性。所有的算法都在相同的条件下完成对比实验。机器人种群大小设置为30,最大评估数统一设置为30万次,所有算法都在基准函数上测试30次,以减少随机条件的影响。对于比较结果,采用平均数avg、方差std、wilcoxon符号秩检验和弗里德曼检验进行分析。
[0093]
将本发明中改进的多元宇宙优化算法和一些同类算法进行比较,以此进一步证明改进的多元宇宙优化算法的核心优势。在实验中,参与比较的基本算法包括mvo(multi
‑
verse optimizer,多元宇宙优化算法)、acor(ant colony optimization for continuous domains,连续域蚁群算法)、ba(bat algorithm,蝙蝠算法)、de(differential evolution,差分进化算法)、fa(firefly algorithm,萤火虫算法)、mfo(moth
‑
flame optimization,飞蛾火焰优化算法)、pso(particle swarm optimization,粒子群算法)、sca(sine cosine algorithm,正余弦优化算法)、ssa(sparrow search algorithm,麻雀搜索算法)、foa(fruit fly optimization algorithm,果蝇优化算法),其中的相关参数取值均采用算法本身设置的参数值。表2和表3给出了改进的多元宇宙优化算法和10个同类算法的比较结果,其中包括均值、方差的分析结果,其中avg表示算法在基准函数上获得的均值,std表示算法获得方差。进一步,表2和表3中还包含了wilcoxon符号秩检验获得的相关结果,即
‘
+’表示在30测试函数中,改进的多元宇宙优化算法的综合表现比其他方法的表现好的函数个数,
‘‑’
表示改进的多元宇宙优化算法的综合表现比其他方法的表现差的函数个数,
‘
=’表示改进的多元宇宙优化算法和其它方法表现相等,
‘
mean’表示各个方法获得的综合排序均值,’rank’即根据mean获得的各个算法的最终排序结果。
[0094]
就获得的函数最优值而言,其中改进的多元宇宙优化算法在9个函数问题上均获得了最优值,即最小均值,de在2个函数问题上获得最优值,这说明改进的多元宇宙优化算法比de在处理不同的优化问题时,改进的多元宇宙优化算法具有更好的处理能力,这同时也说明了改进的多元宇宙优化算法和同类算法在基准函数上进行比较时,它具有较大优势。就获得的函数方差而言,改进的多元宇宙优化算法在8个函数问题获得最小值,de在3个函数问题上获得了最小值,foa在1个函数问题上获得了最小值,这一结果有效地证明了改进的多元宇宙优化算法比de和foa具有更好的稳定性,这也进一步表明了改进的多元宇宙优化算法比其它同类方法的稳定性要好。综合改进的多元宇宙优化算法在13个基准函数上获得的均值和方差来看,改进的多元宇宙优化算法不仅是一种在解空间内具有较强地获得最优解的能力的群智能优化算法,而且改进的多元宇宙优化算法在获得最优最优解的过程中具有较高的稳定性。
[0095]
进一步,就表2和表3中的wilcoxon符号秩检验结果来看,改进的多元宇宙优化算法以排序综合均值为1.33获得了no.1,de以排序综合均值为2.83获得了no.2。在改进的多
元宇宙优化算法和其它同类方法的比较中,还可以看到改进的多元宇宙优化算法在8个函数问题上的表现比排在no.2的de的表现要好,3个函数问题上劣于de,1个函数问题上表现相等。此外,改进的多元宇宙优化算法在11个函数问题优于ssa,1个函数问题上劣于ssa。还值得一提的是在12个基准函数上,改进的多元宇宙优化算法的表现比除了de和ssa以外的同类算法均要更加优秀。在对图3给出了利用弗里德曼检验结果是为了进一步对改进的多元宇宙优化算法的性能进行评估和证明,其中
‘
friedmanranking’即表示根据弗里德曼检验获得排序结果。进行分析后,在改进的多元宇宙优化算法和它的9个基本方法的结果中,改进的多元宇宙优化算法以获得的1.41的值排名no.1,de以获得的2.89的值排名no.2,这进一步说明了改进的多元宇宙优化算法和同类算法进行比较时,它具有较大优势。因此,综合wilcoxon符号秩检验结果和弗里德曼检验结果来看,改进的多元宇宙优化算法是一种优秀的群智能优化算法进一步得到了充分的证明。
[0096]
在图4中,它给出了改进的多元宇宙优化算法和它的10个同类方法在f1、f2、f3、f5、f7、f9的收敛曲线,其中
‘
bestfitness’即表示每一种方法在评估过程中获得最优适应度值。在给出的6个基准函数的收敛曲线均表明了改进的多元宇宙优化算法的收敛精度优于其它算法。进一步,通过对f1、f2、f3的收敛曲线的分析,这说明了改进的多元宇宙优化算法在收敛速度上得到了一定的增强;通过对f5、f7、f9的收敛曲线的分析,结果表明改进的多元宇宙优化算法避免陷入局部最优的能力也强于其它算法。因此,综合对所有给出的收敛曲线的分析,可以明显的发现在改进的多元宇宙优化算法和其它同类算法进行比较时,改进的多元宇宙优化算法的核心优势进一步得到了充分的证明。
[0097]
综上所述,在和同类算法的比较之后发现,改进的多元宇宙优化算法是一种可以获得高质量解、具有较强稳定性、较快的收敛速度、较高的收敛精度、较强的避免陷入局部最优能力的群智能优化算法。
[0098]
表1基准函数描述
[0099]
[0100][0101]
表2改进的多元宇宙优化算法和10个同类算法的比较结果
[0102]
[0103][0104]
表3(续表2)改进的多元宇宙优化算法和10个同类算法的比较结果
[0105]
[0106][0107]
基于上述任意一实施例所述的黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法,本发明还提供了一种计算机设备的较佳实施例:
[0108]
计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如下步骤:
[0109]
获取群体机器人中各机器人的初始位置,并根据所述机器人的初始位置,确定所述机器人的多元宇宙种群;
[0110]
基于多元宇宙算法,根据所述机器人的多元宇宙种群和优化参数,确定各宇宙中所述机器人的一次更新位置;
[0111]
基于黏菌觅食行为模型,根据各宇宙种群中所述机器人的一次更新位置,确定各宇宙中所述机器人的二次更新位置;
[0112]
当所述机器人的二次更新位置满足预设条件时,根据各宇宙中所述机器人的二次更新位置,确定所述机器人的输出位置。
[0113]
基于上述任意一实施例所述的黏菌觅食行为启发的改进多元宇宙的群体机器人控制方法,本发明还提供了一种计算机可读存储介质的较佳实施例:
[0114]
计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如下步骤:
[0115]
获取群体机器人中各机器人的初始位置,并根据所述机器人的初始位置,确定所述机器人的多元宇宙种群;
[0116]
基于多元宇宙算法,根据所述机器人的多元宇宙种群和优化参数,确定各宇宙中所述机器人的一次更新位置;
[0117]
基于黏菌觅食行为模型,根据各宇宙种群中所述机器人的一次更新位置,确定各宇宙中所述机器人的二次更新位置;
[0118]
当所述机器人的二次更新位置满足预设条件时,根据各宇宙中所述机器人的二次更新位置,确定所述机器人的输出位置。
[0119]
应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1