基于数据可视化的快速手眼标定方法及系统与流程
1.本发明涉及快速手眼标定技术领域,具体涉及一种基于数据可视化的快速手眼标定方法及系统。
背景技术:
2.标定3d相机与机器人之间坐标关系被称为手眼标定。当下市面上普遍采取的手眼标定方法为:将标定板安装到机械臂末端,通过移动机械臂来移动标定板,在3d相机(以下均称之为相机)视野下选取8-10个合适的标定点位姿,读取相机以及机器人的位姿数据,调用手眼标定算法对所读取的数据进行计算,最终得到标定结果,完成手眼标定过程。然而,此类方法主要有两点缺陷:第一点,在标定过程中,系统记录的仅仅是抽象的位姿数据,导致用户无法感知所记录的不同标定点之间的位姿差别。第二点,若标定结果有问题,用户无法找到并且查看不合格的标定点位姿,只能重新开始标定。综上两点,此类方法非常耗时耗力。
技术实现要素:
3.本发明提供了基于数据可视化的快速手眼标定方法及系统,采用如下的技术方案:
4.一种基于数据可视化的快速手眼标定方法,包含以下步骤:
5.获取标定板的点云数据;
6.对获取的点云数据进行分析判断其是否符合标准;
7.对获取的点云数据进行渲染并将渲染结果显示给用户,渲染结果通过显示颜色来区分其是否符合标准;
8.在获取到预设数量的点云数据后对这些点云数据进行处理融合处理得到一份融合的完整点云数据。
9.进一步地,获取标定板的点云数据的方法为:
10.系统发送拍照信号给3d相机,触发3d相机拍照;
11.3d相机开始投影,将事先编码好的结构光打到标定板上;
12.投影完成,获取此刻3d相机视野下标定板位姿;
13.3d相机调用点云生成算法,生成标定板位姿的点云数据;
14.3d相机将点云数据传给系统,系统保存至后台数据库中。
15.进一步地,对获取的点云数据进行分析判断其是否符合标准的具体方法为:
16.获取系统后台保存的所有点云数据;
17.调用手眼标定算法处理点云数据;
18.判断用户所标定的点云数据是否符合最佳的点云位姿,并且返回相应结果;
19.若不符合,则判定该点云数据不通过,计算更适合的位姿数据,返回结果0和该推荐的位姿数据;
20.若符合,则判定该点云数据通过,同时返回结果1。
21.进一步地,对获取的点云数据进行渲染并将渲染结果显示给用户的具体方法为:
22.获取系统后台保存的当前获取的点云数据;
23.调用系统点云处理算法处理点云数据;
24.根据处理后的点云数据是否符合标准将其渲染成不同的颜色,将渲染结果显示给用户。
25.进一步地,调用系统点云处理算法处理点云数据的具体方法为:
26.对点云数据进行分割聚类和噪声处理,去除多余无用的点云,只留下系统所需要的点云数据。
27.进一步地,在获取到预设数量的点云数据后对这些点云数据进行处理融合处理得到一份融合的完整点云数据的具体方法为:
28.当获取到预设数量的点云数据时,调取所有的点云数据;
29.依次处理点云数据;
30.将处理后的点云数据与前一个处理好的点云数据进行融合;
31.判断所进行融合的点云数据是否为最后一张点云数据,直到所融合的点云数据为最后一张点云数据;
32.融合后得到一份融合的完整点云数据。
33.进一步地,依次处理点云数据具体方法为:
34.去除点云数据中的无效部分;
35.对点云数据进行滤波处理。
36.一种基于数据可视化的快速手眼标定系统,包含:
37.图像获取模块,用于获取标定板的点云数据;
38.数据分析模块,用于对获取的点云数据进行分析判断其是否符合标准;
39.图像渲染模块,用于对获取的点云数据进行渲染并将渲染结果显示给用户,渲染结果通过其显示的颜色来区分其是否符合标准;
40.图像融合模块,用于在图像获取模块获取到预设数量的点云数据后对这些点云数据进行处理融合处理得到一份融合的完整点云数据。
41.进一步地,图像获取模块为3d相机;
42.图像获取模块获取标定板的点云数据的方法为:
43.系统发送拍照信号给3d相机,触发3d相机拍照;
44.3d相机开始投影,将事先编码好的结构光打到标定板上;
45.投影完成,获取此刻3d相机视野下标定板位姿;
46.3d相机调用点云生成算法,生成标定板位姿的点云数据;
47.3d相机将点云数据传给系统,系统保存至后台数据库中。
48.进一步地,数据分析模块对获取的点云数据进行分析判断其是否符合标准的具体方法为:
49.获取系统后台保存的所有点云数据;
50.调用手眼标定算法处理点云数据;
51.判断用户所标定的点云数据是否符合最佳的点云位姿,并且返回相应结果;
52.若不符合,则判定该点云数据不通过,计算更适合的位姿数据,返回结果0和该推荐的位姿数据;
53.若符合,则判定该点云数据通过,同时返回结果1。
54.进一步地,图像渲染模块对获取的点云数据进行渲染并将渲染结果显示给用户的具体方法为:
55.获取系统后台保存的当前获取的点云数据;
56.调用系统点云处理算法处理点云数据;
57.根据处理后的点云数据是否符合标准将其渲染成不同的颜色,将渲染结果显示给用户。
58.进一步地,图像渲染模块调用系统点云处理算法处理点云数据的具体方法为:
59.对点云数据进行分割聚类和噪声处理,去除多余无用的点云,只留下系统所需要的点云数据。
60.进一步地,图像融合模块在图像获取模块获取到预设数量的点云数据后对这些点云数据进行处理融合处理得到一份融合的完整点云数据的具体方法为:
61.当图像获取模块获取到预设数量的点云数据时,图像融合模块调取所有的点云数据;
62.依次处理点云数据;
63.将处理后的点云数据与前一个处理好的点云数据进行融合;
64.判断所进行融合的点云数据是否为最后一张点云数据,直到所融合的点云数据为最后一张点云数据;
65.融合后得到一份融合的完整点云数据。
66.进一步地,图像融合模块依次处理点云数据具体方法为:
67.去除点云数据中的无效部分;
68.对点云数据进行滤波处理。
69.一种终端设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现前述的基于数据可视化的快速手眼标定方法的步骤。
70.一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现前述的基于数据可视化的快速手眼标定方法的步骤。
71.本发明的有益之处在于所提供的基于数据可视化的快速手眼标定方法及系统通过将数据进行可视化呈现,让用户在标定阶段明显感知到所标定的不同位姿点之间的差别,有效进行标定板位姿的选取,并且还可推荐合适的标定板位姿,用户无需重新进行手眼标定。让用户可在最短时间内完成手眼标定。
附图说明
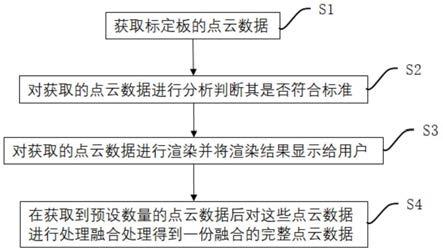
72.图1是本发明的基于数据可视化的快速手眼标定方法的示意图;
73.图2是本发明的基于数据可视化的快速手眼标定系统的示意图;
74.图3是本发明的终端设备的示意图;
75.图像获取模块11,数据分析模块12,图像渲染模块13,图像融合模块14。
具体实施方式
76.以下结合附图和具体实施例对本发明作具体的介绍。
77.如图1所示为本技术的一种基于数据可视化的快速手眼标定方法,包含以下步骤:步骤s1:获取标定板的点云数据。步骤s2:对获取的点云数据进行分析判断其是否符合标准。步骤s3:对获取的点云数据进行渲染并将渲染结果显示给用户,渲染结果通过显示颜色来区分其是否符合标准。步骤s4:在获取到预设数量的点云数据后对这些点云数据进行处理融合处理得到一份融合的完整点云数据。以下具体介绍上述步骤。
78.对于步骤s1:获取标定板的点云数据。
79.具体而言,获取标定板的点云数据的方法为:系统发送拍照信号给3d相机,触发3d相机拍照。3d相机开始投影,将事先编码好的结构光打到标定板上。投影完成,获取此刻3d相机视野下标定板位姿。3d相机调用点云生成算法,生成标定板位姿的点云数据。3d相机将点云数据传给系统,系统保存至后台数据库中。
80.对于步骤s2:对获取的点云数据进行分析判断其是否符合标准。
81.具体而言,对获取的点云数据进行分析判断其是否符合标准的具体方法为:获取系统后台保存的所有点云数据。调用手眼标定算法处理点云数据。判断用户所标定的点云数据是否符合最佳的点云位姿,并且返回相应结果。若不符合,则判定该点云数据不通过,计算更适合的位姿数据,返回结果0和该推荐的位姿数据。若符合,则判定该点云数据通过,同时返回结果1。
82.对于步骤s3:对获取的点云数据进行渲染并将渲染结果显示给用户,渲染结果通过显示颜色来区分其是否符合标准。
83.对获取的点云数据进行渲染并将渲染结果显示给用户的具体方法为:获取系统后台保存的当前获取的点云数据。调用系统点云处理算法处理点云数据。根据处理后的点云数据是否符合标准将其渲染成不同的颜色,将渲染结果显示给用户。其中,调用系统点云处理算法处理所述点云数据的具体方法为:对点云数据进行分割聚类和噪声处理,去除多余无用的点云,只留下系统所需要的点云数据。
84.可以理解的是,基于步骤s2中的分析,可以判断当前获取的点云数据是否符合要求,在进行渲染后,通过渲染图像的颜色来进行区分。本技术中,对于符合标准的点云数据,渲染后用绿色显示,对于不符合标准的点云数据,渲染后用红色显示。同时,用户可以在当前的点云数据不符合标准时,根据步骤s2中推荐的位姿数据,重新获取符合标准的点云数据。当然,用户也可以根据需要,保留当前不符合标准的点云数据。
85.不断调整标定板的位姿,重复执行步骤s1-s3获取多个点云数据,每获取一个点云数据,都经过步骤s1-s3的渲染-分析-显示,供用户进行判断,直至获取到预设数量的点云数据后,执行步骤s4。本技术中,预设数量选择为8,预设数量可以根据需要进行适应性调整。
86.可以理解的是,步骤s2的判断步骤中,每一次均获取之前所有获取到的点云数据来综合分析当前这份点云数据是否符合标准。而步骤s3的渲染步骤,每个都仅仅调取刚刚获取到的点云数据进行渲染。
87.对于步骤s4:在获取到预设数量的点云数据后对这些点云数据进行处理融合处理得到一份融合的完整点云数据。
88.针对步骤s4,在获取到预设数量的点云数据后对这些点云数据进行处理融合处理得到一份融合的完整点云数据的具体方法为:当获取到预设数量的点云数据时,调取所有的点云数据。依次处理点云数据。将处理后的点云数据与前一个处理好的点云数据进行融合。判断所进行融合的点云数据是否为最后一张点云数据,直到所融合的点云数据为最后一张点云数据。融合后得到一份融合的完整点云数据。完整点云数据可以用于进行渲染以及分析,这样,渲染后的结果是在显示界面中同时显示8个标定板的点云数据,并且每一个点云数据通过显示绿色或红色来表示是否符合标准。其中,依次处理点云数据具体方法为:去除点云数据中的无效部分,再对点云数据进行滤波处理。
89.如图2所示,本发明还提供了一种基于数据可视化的快速手眼标定系统,包含:图像获取模块11、数据分析模块12、图像渲染模块13和图像融合模块14。图像获取模块11用于获取标定板的点云数据。数据分析模块12用于对获取的点云数据进行分析判断其是否符合标准。图像渲染模块13用于对获取的点云数据进行渲染并将渲染结果显示给用户,渲染结果通过其显示的颜色来区分其是否符合标准。图像融合模块14用于在图像获取模块11获取到预设数量的点云数据后对这些点云数据进行处理融合处理得到一份融合的完整点云数据。
90.具体地,图像获取模块11为上述的3d相机。图像获取模块11获取标定板的点云数据的方法为:系统发送拍照信号给3d相机,触发3d相机拍照。3d相机开始投影,将事先编码好的结构光打到标定板上。投影完成,获取此刻3d相机视野下标定板位姿。3d相机调用点云生成算法,生成标定板位姿的点云数据。3d相机将点云数据传给系统,系统保存至后台数据库中。图像获取模块11的核心工作是拍摄此刻相机视野下的标定板点云信息,同时将此数据保存至系统后台,为图像融合模块14以及图像渲染模块13提供基础。
91.数据分析模块12对获取的点云数据进行分析判断其是否符合标准的具体方法为:获取系统后台保存的所有点云数据。调用手眼标定算法处理点云数据。判断用户所标定的点云数据是否符合最佳的点云位姿,并且返回相应结果。若不符合,则判定该点云数据不通过,计算更适合的位姿数据,返回结果0和该推荐的位姿数据。若符合,则判定该点云数据通过,同时返回结果1。数据分析模块12的核心工作是调用手眼标定算法来判断用户当前所标定的位姿数据是否符合要求,处理完成后返回判定结果,同时将结果交由图像渲染模块13。通过图像渲染模块13呈现给用户查看,用户所看到的若为合格,则图像呈现绿色,表示合格。若不合格,则图像呈现红色,表示不合格,同时给出推荐的位姿处,用户可以移动标定板至该推荐的位姿处。也可以不进行调整,保留获取到的点云数据。
92.图像渲染模块13对获取的点云数据进行渲染并将渲染结果显示给用户的具体方法为:获取系统后台保存的当前获取的点云数据。调用系统点云处理算法处理点云数据。根据处理后的点云数据是否符合标准将其渲染成不同的颜色,将渲染结果显示给用户。其中,图像渲染模块13调用系统点云处理算法处理点云数据的具体方法为:对点云数据进行分割聚类和噪声处理,去除多余无用的点云,只留下系统所需要的点云数据。
93.图像融合模块14在图像获取模块11获取到预设数量的点云数据后对这些点云数据进行处理融合处理得到一份融合的完整点云数据的具体方法为:当图像获取模块11获取到预设数量的点云数据时,图像融合模块14调取所有的点云数据。依次处理点云数据。将处理后的点云数据与前一个处理好的点云数据进行融合。判断所进行融合的点云数据是否为
最后一张点云数据,直到所融合的点云数据为最后一张点云数据。融合后得到一份融合的完整点云数据。
94.图像融合模块14依次处理点云数据具体方法为:去除点云数据中的无效部分,对点云数据进行滤波处理。
95.如图3所示,本发明还公开了一种终端设备,该终端设备包括存储器401和处理器402,存储器401存储有计算机程序,处理器402执行计算机程序时实现上述实施例的基于数据可视化的快速手眼标定方法的步骤。
96.本发明还公开了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述实施例的基于数据可视化的快速手眼标定方法的步骤。
97.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
98.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1