一种工业机械人用的多功能移动式平台
1.本发明属于工业机械人技术领域,尤其是涉及一种工业机械人用的多功能移动式平台。
背景技术:
2.现有的工业机械人主要是通过移动平台提高工业机械人的作业范围,现有的工业机械人主要是对工件进行夹持,之后通过移动平台放到指定的位置,但是现有的技术只是通过吸盘的形式对工件进行夹持,面对外圆面精度高且有内环壁的工件不能在外部进行夹持的情况下,需要在内部进行撑紧,但是现有的技术无法适应不同大小的内环壁,从而只能对单一形状的内环壁工件进行作业,并且大多时对圆形的内环壁进行夹持,无法对椭圆形的内环壁进行夹持,之后也无法控制对工件的夹持力,导致面对材料脆弱但是大小不同的工件,无法很好的对工件进行保护。
技术实现要素:
3.本发明为了克服现有技术的不足,提供一种可以更好的对不同形状内环壁的工件进行稳定以及夹持力大小可控、可调节,更好的对工件进行保护的工业机械人用的多功能移动式平台。
4.为了实现上述目的,本发明采用以下技术方案:一种工业机械人用的多功能移动式平台,包括底座、固定设于底座上的第一电机、转动设于底座中并固定连接于第一电机的丝杠、连接于丝杠进行传动的螺母、固定设于螺母上的支撑座、固定设于支撑座下方的第一滑块、固定设于底座上并滑动连接于第一滑块用于导向的导轨、固定连接于支撑座的机械臂、固定设于机械臂上的第一支撑板、固定设于第一支撑板下方的支撑杆、连接于支撑杆的撑紧结构、连接于撑紧结构用于对工件内环部进行夹持的夹持结构、连接于撑紧结构和夹持结构用于对不同形状的工件进行适配的调节结构、连接于撑紧结构和夹持结构用于使夹持结构撑紧工件的第一弹簧、连接于撑紧结构用于对工件内环进行清理的清理结构;所述撑紧结构包括设于支撑杆上的两个第一驱动板、固定连接于第一驱动板的第二支撑板、固定设于两个第一驱动板之间用于驱动第一驱动板进行运动的第一电动杆、铰接于第二支撑板的多个第一连杆、铰接于第一连杆的第三支撑板、固定连接于第三支撑板的第一伸缩杆、固定连接于第一伸缩杆的第四支撑板、设于第三支撑板上的卡板组件、连接于卡板组件和支撑杆的第二伸缩杆;所述第一弹簧连接于第四支撑板和卡板组件;所述夹持结构设于所述第四支撑板上;所述第一连杆有多个;所述多个第一连杆相互铰接;所述第三支撑板通过卡板组件和第一弹簧推动所述第四支撑板运动;所述调节结构连接于卡板组件和夹持结构;所述夹持结构包括用于对工件内环进行撑紧的第一撑紧板和第二撑紧板、连接于第一撑紧板和第二撑紧板的适配组件、固定设于第四支撑板上并连接于适配组件的第一导向杆;所述适配组件包括铰接于第二撑紧板的第二连杆、铰接于第二连杆并滑动连接于第一导向杆的第二滑块、铰接于第二滑块和第一撑紧板的第三连杆、铰接于第二撑紧板的铰接
块、固定设于第四支撑板上方的固定块、固定连接于固定块和铰接块用于对第二撑紧板运动进行导向的第四伸缩杆;螺母用于控制支撑座进行一定范围上的移动,增加使用范围,之后机械臂会对第一支撑板进行多自由度的控制,之后控制第一支撑板进入到工件内环面的中心位置;从而也就是支撑杆进入到中心位置,之后第一驱动板有两个,上方的第一驱动板固定设于支撑杆上,下方的第一驱动板滑动设于支撑杆上,之后第一电动杆驱动下方的第一驱动板向上运动,从而通过第二支撑板使多个第一连杆进行展开,也就是第三支撑板会朝着支撑杆的离心方向运动,之后第三支撑板带动卡板组件运动,卡板组件会通过第一弹簧带动第四支撑板进行运动,之后第四支撑板带动夹持结构进行运动,第一伸缩杆用于对第四支撑板进行导向,使第四支撑板进行线性的运动,之后第一撑紧板和第二撑紧板会抵在工件的内环上,之后由于第四支撑板的运动为线性运动,所以第一撑紧板会一直处于两个第二撑紧板中间的位置,从而对椭圆内环以及圆形内环的工件进行内部撑紧时,都是第二撑紧板先接触到内壁,之后第四支撑板还会继续运动,从而第二撑紧板会在第二撑紧板撑紧结构的导向下向后进行运动,之后第一撑紧板向前运动,从而使第一撑紧板和第二撑紧板可以快速抵在内壁上,从而增加了第一撑紧板和第二撑紧板对工件内环的适配速度,更快的实现夹持,之后第二支撑板是有四个的,四个第二支撑板上的第一连杆同时展开,从而可以更快的使四个第一撑紧板和第二撑紧板抵在内环上,更快的实现撑紧,避免工件位置发生变化影响撑紧的效果,第一撑紧板和第二撑紧板运动时会带动调节结构进行运动,之后调节结构会带动卡板组件运动,从而会使卡板组件和第四支撑板之间的距离发生变化,从而也就是使第一弹簧被压缩的程度进行调节,从而可以通过调节第一弹簧的压缩程度,来调节第一撑紧板和第二撑紧板撑紧工件内环的力,从而使第一撑紧板和第二撑紧板可以保持恒定的力对不同大小的工件进行撑紧,从而避免有些工件材料脆弱,在撑紧时由于力度没有控制好导致工件破损的现象,从而提高了对工件的保护以及第一撑紧板和第二撑紧板的通用性,之后第一撑紧板和第二撑紧板可以根据弧度的不同进行适配,进一步增加了通用性。
5.进一步的,所述夹持结构还包括固定设于第一撑紧板和第四支撑板之间用于对第一撑紧板运动进行导向的第三伸缩杆;所述第一撑紧板和第二撑紧板为弹性的金属片;所述铰接块和所述第二连杆与所述第二撑紧板铰接的位置相同;所述第二撑紧板为转动设于铰接块以及第二连杆上;在第二撑紧板贴在工件内环上时,由于第二撑紧板处于第一撑紧板的两侧,所述第二撑紧板并不是从工件的中心位置出发向工件内壁进行靠拢的,从而也就是通过第二撑紧板可以旋转,使第二撑紧板的中心位置对准工件的中心位置,使第二撑紧板达到和第一撑紧板一样的位置对工件进行撑紧,从而通过第二撑紧板的旋转可以更好的贴在工件的内壁上,之后第一撑紧板和第二撑紧板都是弹性金属片,从而还可以使第一撑紧板和第二撑紧板发生变形,从而更好的适配工件内部的弧度,之后第二撑紧板的旋转会使第二撑紧板发生形变时是从中心位置开始的,第二撑紧板两边的型变量相同,不会由于一大一小,导致形变大的一边容易老化,从而也就是更好的提高第二撑紧板的使用寿命。
6.进一步的,所述调节结构包括连接于第二滑块的伸缩组件、连接于伸缩组件的连接组件、连接于连接组件用于对第一弹簧进行调节的驱动组件、连接于驱动组件用于调节驱动组件对第一弹簧调节程度的调节组件、连接于驱动组件用于对卡板组件进行固定的卡位组件、连接于调节组件和卡板组件用于驱动卡板组件的绳索、固定设于第三支撑板上的
第一支架、设于第一支架上并使绳索绕在上方的定滑轮;所述伸缩组件包括固定连接于第二滑块的第三滑块、铰接于第三滑块的第四连杆、铰接于第三滑块的第五连杆、铰接于第四连杆和第五连杆的第一转轴、铰接于第四连杆和第五连杆的第二导向杆;所述第四连杆和第五连杆有多个并相互铰接;第一撑紧板和第二撑紧板会对不同工件的不同弧度的内壁进行进行适配,从而也就是第一撑紧板和第二撑紧板会根据工件内壁的弧度不同从而进行不同的运动,也就是第一撑紧板和第二撑紧板全部抵在内壁上会导致两个第二滑块运动的距离不同,从而也就会导致第三滑块运动距离进行变化,之后第三滑块相向运动会使第四连杆和第五连杆展开,从而也就是会根据工件内壁的弧度不同进行不同位置的展开,之后通过第四连杆和第五连杆的设置会将第二滑块之间的运动进行放大,从而会使运动的位置变化更加明显,之后第二导向杆会带动连接组件进行运动,之后连接组件带动驱动组件进行运动,驱动组件会带动调节组件运动,之后调节组件会带动绳索进行运动,之后绳索受到拉动,绳索受到拉动的方向为朝着第四支撑板方向的,之后绳索通过定滑轮改变方向,会拉动第一拉板朝着远离第四支撑板的方向,也就是远离第三支撑板的方向,之后也就是使第一弹簧的另一端远离第四支撑板进行运动,从而实现了对第一弹簧的松弛,从而也就是弧度越小,第一撑紧板和第二撑紧板运动的程度就会增加,也就是会使伸缩组件运动的距离增加,从而也就是会使驱动组件和调节组件带动绳索运动的长度增加,从而也就是第一弹簧的另一端运动的距离增加,从而会使第一撑紧板和第二撑紧板抵在工件内壁上的力进行降低,从而也就是可以更好的对内壁圆形弧度小的工件进行适配,遇到内壁圆形弧度大的工件,也就是内壁的直径大,可以通过拉动第一弹簧另一端运动的距离减少,从而使第一撑紧板和第二撑紧板保持同样的力抵在工件的内壁上,从而进一步增加了对工件的通用性以及对工件的保护效果。
7.进一步的,所述连接组件包括铰接于第二导向杆的第五支撑板、铰接于两个第五支撑板的第五伸缩杆、设于第五伸缩杆中间位置的第六支撑板、固定设于第六支撑板和第四支撑板之间用于对第五伸缩杆运动进行导向的第六伸缩杆、固定连接于第六支撑板的第七支撑板;所述驱动组件包括固定设于两个第七支撑板之间的第二转轴、固定设于第二转轴上的齿轮、固定连接于第四支撑板并啮合于齿轮的齿条、固定设于第二转轴上的绕辊;所述调节组件包括滑动设于绕辊上的第四滑块、固定设于第四滑块上并固定连接于绳索的伸展杆;所述绕辊上设有滑槽;所述第四滑块滑动连接于所述绕辊的滑槽中;所述绕辊旋转时带动所述伸展杆旋转;伸缩组件运动会带动第五支撑板运动,第五支撑板通过第五伸缩杆带动第六支撑板进行运动,由于第二导向杆运动时还会相向运动,从而通过两个第五伸缩杆的设置可以使第六支撑板正常运动,不会卡死,之后第六支撑板运动带动第七支撑板运动,之后第七支撑板会使第二转轴运动,之后齿轮在齿条的作用下会使绕辊旋转,之后也就是伸展杆旋转,之后伸展杆旋转会将绳索卷起,从而使绳索受到拉力,之后伸展杆旋转一圈卷起绳索的长度大于绕辊线性运动的距离,从而实现绳索带动第一拉板运动,从而对第一弹簧的另一端进行放松,从而更好对使第一撑紧板和第二撑紧板对内壁的压力进行适配调节。
8.进一步的,所述调节组件还包括设于第二转轴外侧并不与绕辊接触的两个圆环板、固定设于圆环板上的第八支撑板、交接与第八支撑板的第七连杆、固定设于第八支撑板并滑动设于绕辊上用于对圆环板导向的导向板、固定设于两个圆环板之间的第二电动杆;
所述第七连杆铰接于所述第四滑块;当需要对椭圆内壁的工件进行内部撑紧实现夹持时,由于椭圆的两个象限点处的弧度不同,一个弧度大,一个弧度小,椭圆的形状特殊,弧度大的地方第四支撑板运动的距离小,弧度小的地方,第四支撑板运动的距离大;所以需要对这个问题进行解决;之后也就是面对圆形的内壁时,对于和椭圆一样的大弧度面时,椭圆和圆形的区别是,第四支撑板运动的距离降低了,但是第一撑紧板和第二撑紧板运动的程度相同,之后也就是对椭圆的大弧度处进行撑紧时,会由于第四支撑板运动的距离短,第三支撑板运动的距离没有变,从而会导致第一弹簧被压缩的程度增加,之后第一撑紧板和第二撑紧板运动的程度相同,从而对第一弹簧调节的程度小,从而会导致对大弧度处的撑紧力过大,不利于对工件的保护,从而这时通过第二电动杆调节伸展杆的撑开的程度,使伸展杆撑开的程度增加,从而会使伸展杆在旋转较少的圈数时由于伸展杆直径大,可以卷起更多的绳索,从而对第一弹簧的另一端进行调节的距离增加,从而可以更好的对第一弹簧的弹力进行调节,从而降低了第一弹簧作用给第一撑紧板和第二撑紧板的力,从而更好的对工件进行保护,当面对椭圆弧度小处进行撑紧时,运动的原理相同,通过减少伸展杆撑开的程度来实现,从而可以对椭圆弧度小处进行保护工件的撑紧,之后第一连杆是设置了四个的,四个分别进行控制,可以更好的实现两个第一连杆对椭圆大弧度进行撑紧,两外两个第一连杆对椭圆小弧度进行撑紧,从而更好的实现了对椭圆形状的撑紧夹持的同时更好的对工件进行保护,从而进一步的提高了通用性和对工件的保护效果。
9.进一步的,所述卡位组件包括固定连接于卡板组件的卡槽板、设于卡槽板两侧用于对卡槽板进行固定的卡块、固定连接于卡块的第二弹簧、固定连接于第二弹簧的第九支撑板、铰接于第九支撑板的第六连杆、铰接于第六连杆的控制杆、连接于控制杆和齿轮的控制组件、固定连接于第六支撑板的固定板、固定设于两个固定板之间并与第九支撑板滑动连接用于对第九支撑板进行导向的第三导向杆;第一撑紧板和第二撑紧板抵在工件内壁上的过程会使齿轮进行旋转,之后齿轮旋转会通过控制组件实现对控制杆的驱动,使控制杆运动一端距离之后停止,从而通过第六连杆带动第九支撑板,从而使卡块卡在卡槽板中,从而也就是对第一拉板位置进行调节时会带动卡槽板一起运动,之后卡块卡在卡槽板中,会使卡槽板的位置被固定住,之后也就是对第一拉板的位置实现固定,从而也就是实现了对第一弹簧另一端的位置实现了固定,从而提高了使用的稳定性,当夹持完毕,需要对工件进行松开时,第一连杆进行复位,之后也就是第一拉板也会进行复位,在复位时是靠第一弹簧的弹力进行的,从而这时齿轮反向旋转,带动控制杆复位,使卡块进行复位,从而卡块不再卡住卡槽板,从而使卡槽板更好的进行复位,从而进一步提高了运行的稳定性。
10.进一步的,所述控制组件固定连接于控制杆并啮合于齿轮的第一齿板、固定设于第一齿板两侧的第四导向杆、滑动设于第四导向杆上的第二齿板、固定设于第二齿板外侧的卡位板、设于第一齿板和第二齿板之间的第三弹簧;第一齿板和第二齿板都可以与齿轮进行啮合,从而通过齿轮旋转,只要齿轮开始旋转,就会带动第一齿板运动,之后很快就会与第二齿板啮合,之后第二齿板会在第三弹簧的作用下进行滑齿,从而会使第二齿板不与齿轮脱离啮合,但是齿轮旋转不会再带动第一齿板进行运动,从而实现了齿轮旋转带动第一齿板运动一段距离之后停止,也就是控制杆运动一端距离停止,提高运行的稳定性。
11.进一步的,所述卡板组件包括固定连接于绳索的第一拉板、固定连接于第一拉板的第七伸缩杆、固定连接于第七伸缩杆的第十支撑板、设于第一拉板和第十支撑板之间的
电动调节杆、所述第二伸缩杆用于对第一拉板和第十支撑板的运动进行导向;当面对工件的重量很大,需要对第一弹簧的弹力进行增加时,电动调节杆会带动第十支撑板朝着第一拉板的方向进行运动,使第一拉板和第十支撑板之间的距离变小,之后也就是使第一弹簧原本的压缩程度进行增加,从而也就是在后面对第一弹簧的弹力进行调节时是基于第一弹簧的弹力足够大的前提下进行调节,从而会使第一撑紧板和第二撑紧板受到来自第一弹簧的弹力进行增加,之后电动调节杆上是设有压力传感器的,工作人员可以根据工件对电动调节杆预设一个压力值,从而电动调节杆会控制第一拉板和第十支撑板之间的距离,从而也就是对第一弹簧最终的压缩程度进行调节,从而进一步增加了通用性。
12.进一步的,所述清理结构包括固定设于第二支撑板上方的气箱、设于气箱内部的空腔、滑动设于空腔中的活塞板、固定连接于活塞板的第三支架、固定连接于第三支架和第三支撑板的第二支架、固定连接于空腔并与空腔相互连通的出气管;所述出气管固定设于第四支撑板上;当第一连杆进行展开时会带动第二支架运动,从而通过第三支架带动活塞板运动,之后活塞板会将空腔中的空气在出气管中向外压出,之后会有空气吹在工件内壁上,会使工件的内壁更加干净,提高了第一撑紧板和第二撑紧板对工件撑紧夹持的效果;所述气箱侧面设有通气阀,用于使活塞板复位时更稳定。
13.综上所述,本发明通过设置了夹持结构,可以快速对工件内环的壁进行适配,从而夹持在内壁上,提高了夹持的速度的同时提高了对内壁形状的通用性;设置了调节结构,更好的保证夹持结构对内壁撑紧的力保持恒定,不会由于工件内壁形状的变化导致撑紧力发生变化,从而更好的对工件进行保护;设置了四个第一连杆,实现对椭圆以及圆形的撑紧,进一步提高了通用性。
附图说明
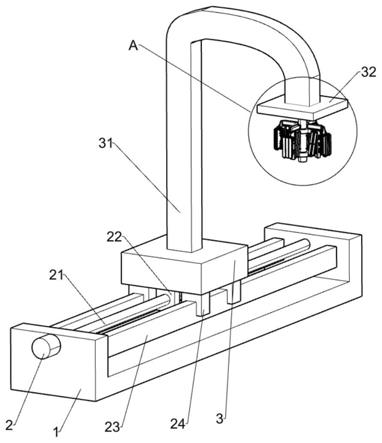
14.图1为本发明的结构示意图;
15.图2为本发图1中a的放大图;
16.图3为本发明中撑紧结构的结构示意图一;
17.图4为本发明中撑紧结构的部分结构示意图;
18.图5为本发明中撑紧结构的结构示意图二;
19.图6为本发明图5中b的放大图;
20.图7为本发明图5中c的放大图;
21.图8为本发明中第一支架的结构示意图;
22.图9为本发明中m-m的位置示意图;
23.图10为本发明中m-m的剖视结构示意图;
24.图11为本发明中m-m的局部剖视结构示意图一;
25.图12为本发明图11中d的放大图;
26.图13为本发明中m-m的局部剖视结构示意图二;
27.图14为本发明图13中e的放大图;
28.图15为本发明图13中f的放大图;
29.图16为本发明中卡位组件的结构示意图;
30.图17为本发明图16中g的放大图;
31.图18为本发明图16中h的放大图;
32.图19为本发明中控制组件的结构示意图;
33.图20为本发明中n-n的w位置示意图;
34.图21为本发明中n-n的剖视结构示意图;
35.图22为本发明图21中i的放大图;
具体实施方式
36.为了使本技术领域的人员更好的理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。
37.如图1-22所示,一种工业机械人用的多功能移动式平台,包括底座1、固定设于底座1上的第一电机2、转动设于底座1中并固定连接于第一电机2的丝杠21、连接于丝杠21进行传动的螺母22、固定设于螺母22上的支撑座3、固定设于支撑座3下方的第一滑块24、固定设于底座1上并滑动连接于第一滑块24用于导向的导轨23、固定连接于支撑座3的机械臂31、固定设于机械臂31上的第一支撑板32、固定设于第一支撑板32下方的支撑杆4、连接于支撑杆4的撑紧结构5、连接于撑紧结构5用于对工件内环部进行夹持的夹持结构6、连接于撑紧结构5和夹持结构6用于对不同形状的工件进行适配的调节结构7、连接于撑紧结构5和夹持结构6用于使夹持结构6撑紧工件的第一弹簧8、连接于撑紧结构5用于对工件内环进行清理的清理结构9;所述撑紧结构5包括设于支撑杆4上的两个第一驱动板51、固定连接于第一驱动板51的第二支撑板52、固定设于两个第一驱动板51之间用于驱动第一驱动板51进行运动的第一电动杆53、铰接于第二支撑板52的多个第一连杆54、铰接于第一连杆54的第三支撑板55、固定连接于第三支撑板55的第一伸缩杆56、固定连接于第一伸缩杆56的第四支撑板57、设于第三支撑板55上的卡板组件59、连接于卡板组件59和支撑杆4的第二伸缩杆58;所述第一弹簧8连接于第四支撑板57和卡板组件59;所述夹持结构6设于所述第四支撑板57上;所述第一连杆54有多个;所述多个第一连杆54相互铰接;所述第三支撑板55通过卡板组件59和第一弹簧8推动所述第四支撑板57运动;所述调节结构7连接于卡板组件59和夹持结构6;所述夹持结构6包括用于对工件内环进行撑紧的第一撑紧板61和第二撑紧板62、连接于第一撑紧板61和第二撑紧板62的适配组件63、固定设于第四支撑板57上并连接于适配组件63的第一导向杆64;所述适配组件63包括铰接于第二撑紧板62的第二连杆631、铰接于第二连杆631并滑动连接于第一导向杆64的第二滑块632、铰接于第二滑块632和第一撑紧板61的第三连杆633、铰接于第二撑紧板62的铰接块634、固定设于第四支撑板57上方的固定块636、固定连接于固定块636和铰接块634用于对第二撑紧板62运动进行导向的第四伸缩杆635;螺母22用于控制支撑座3进行一定范围上的移动,增加使用范围,之后机械臂31会对第一支撑板32进行多自由度的控制,之后控制第一支撑板32进入到工件内环面的中心位置;从而也就是支撑杆4进入到中心位置,之后第一驱动板51有两个,上方的第一驱动板51固定设于支撑杆4上,下方的第一驱动板51滑动设于支撑杆4上,之后第一电动杆53驱动下方的第一驱动板51向上运动,从而通过第二支撑板52使多个第一连杆54进行展开,也就是第三支撑板55会朝着支撑杆4的离心方向运动,之后第三支撑板55带动卡板组件59运动,卡板组件59会通过第一弹簧8带动第四支撑板57进行运动,之后第四支撑板57带动夹持结构6进行运动,第一伸缩杆56用于对第四支撑板57进行导向,使第四支撑板57进行线性的运
动,之后第一撑紧板61和第二撑紧板62会抵在工件的内环上,之后由于第四支撑板57的运动为线性运动,所以第一撑紧板61会一直处于两个第二撑紧板62中间的位置,从而对椭圆内环以及圆形内环的工件进行内部撑紧时,都是第二撑紧板62先接触到内壁,之后第四支撑板57还会继续运动,从而第二撑紧板62会在第二撑紧板62撑紧结构5的导向下向后进行运动,之后第一撑紧板61向前运动,从而使第一撑紧板61和第二撑紧板62可以快速抵在内壁上,从而增加了第一撑紧板61和第二撑紧板62对工件内环的适配速度,更快的实现夹持,之后第二支撑板52是有四个的,四个第二支撑板52上的第一连杆54同时展开,从而可以更快的使四个第一撑紧板61和第二撑紧板62抵在内环上,更快的实现撑紧,避免工件位置发生变化影响撑紧的效果,第一撑紧板61和第二撑紧板62运动时会带动调节结构7进行运动,之后调节结构7会带动卡板组件59运动,从而会使卡板组件59和第四支撑板57之间的距离发生变化,从而也就是使第一弹簧8被压缩的程度进行调节,从而可以通过调节第一弹簧8的压缩程度,来调节第一撑紧板61和第二撑紧板62撑紧工件内环的力,从而使第一撑紧板61和第二撑紧板62可以保持恒定的力对不同大小的工件进行撑紧,从而避免有些工件材料脆弱,在撑紧时由于力度没有控制好导致工件破损的现象,从而提高了对工件的保护以及第一撑紧板61和第二撑紧板62的通用性,之后第一撑紧板61和第二撑紧板62可以根据弧度的不同进行适配,进一步增加了通用性。
38.具体的,所述夹持结构6还包括固定设于第一撑紧板61和第四支撑板57之间用于对第一撑紧板61运动进行导向的第三伸缩杆65;所述第一撑紧板61和第二撑紧板62为弹性的金属片;所述铰接块634和所述第二连杆631与所述第二撑紧板62铰接的位置相同;所述第二撑紧板62为转动设于铰接块634以及第二连杆631上。
39.具体的,所述调节结构7包括连接于第二滑块632的伸缩组件71、连接于伸缩组件71的连接组件72、连接于连接组件72用于对第一弹簧8进行调节的驱动组件73、连接于驱动组件73用于调节驱动组件73对第一弹簧8调节程度的调节组件74、连接于驱动组件73用于对卡板组件59进行固定的卡位组件75、连接于调节组件74和卡板组件59用于驱动卡板组件59的绳索76、固定设于第三支撑板55上的第一支架77、设于第一支架77上并使绳索76绕在上方的定滑轮771;所述伸缩组件71包括固定连接于第二滑块632的第三滑块711、铰接于第三滑块711的第四连杆712、铰接于第三滑块711的第五连杆713、铰接于第四连杆712和第五连杆713的第一转轴714、铰接于第四连杆712和第五连杆713的第二导向杆715;所述第四连杆712和第五连杆713有多个并相互铰接。
40.具体的,所述连接组件72包括铰接于第二导向杆715的第五支撑板721、铰接于两个第五支撑板721的第五伸缩杆722、设于第五伸缩杆722中间位置的第六支撑板723、固定设于第六支撑板723和第四支撑板57之间用于对第五伸缩杆722运动进行导向的第六伸缩杆724、固定连接于第六支撑板723的第七支撑板725;所述驱动组件73包括固定设于两个第七支撑板725之间的第二转轴734、固定设于第二转轴734上的齿轮733、固定连接于第四支撑板57并啮合于齿轮733的齿条732、固定设于第二转轴734上的绕辊731;所述调节组件74包括滑动设于绕辊731上的第四滑块742、固定设于第四滑块742上并固定连接于绳索76的伸展杆741;所述绕辊731上设有滑槽;所述第四滑块742滑动连接于所述绕辊731的滑槽中;所述绕辊731旋转时带动所述伸展杆741旋转。
41.具体的,所述调节组件74还包括设于第二转轴734外侧并不与绕辊731接触的两个
圆环板745、固定设于圆环板745上的第八支撑板744、交接与第八支撑板744的第七连杆743、固定设于第八支撑板744并滑动设于绕辊731上用于对圆环板745导向的导向板747、固定设于两个圆环板745之间的第二电动杆746;所述第七连杆743铰接于所述第四滑块742。
42.具体的,所述卡位组件75包括固定连接于卡板组件59的卡槽板751、设于卡槽板751两侧用于对卡槽板751进行固定的卡块752、固定连接于卡块752的第二弹簧753、固定连接于第二弹簧753的第九支撑板754、铰接于第九支撑板754的第六连杆755、铰接于第六连杆755的控制杆756、连接于控制杆756和齿轮733的控制组件78、固定连接于第六支撑板723的固定板758、固定设于两个固定板758之间并与第九支撑板754滑动连接用于对第九支撑板754进行导向的第三导向杆757。
43.具体的,所述控制组件78固定连接于控制杆756并啮合于齿轮733的第一齿板781、固定设于第一齿板781两侧的第四导向杆783、滑动设于第四导向杆783上的第二齿板782、固定设于第二齿板782外侧的卡位板785、设于第一齿板781和第二齿板782之间的第三弹簧784。
44.具体的,所述卡板组件59包括固定连接于绳索76的第一拉板591、固定连接于第一拉板591的第七伸缩杆592、固定连接于第七伸缩杆592的第十支撑板593、设于第一拉板591和第十支撑板593之间的电动调节杆594、所述第二伸缩杆58用于对第一拉板591和第十支撑板593的运动进行导向。
45.具体的,所述清理结构9包括固定设于第二支撑板52上方的气箱91、设于气箱91内部的空腔94、滑动设于空腔94中的活塞板96、固定连接于活塞板96的第三支架95、固定连接于第三支架95和第三支撑板55的第二支架93、固定连接于空腔94并与空腔94相互连通的出气管92;所述出气管92固定设于第四支撑板57上。
46.本发明的具体工作流程是:机械臂31会带动第一支撑板32进行多自由度的运动,之后第一支撑板32运动到工件的中心处,之后控制第一支撑板32垂直向下进行运动,之后也就是带动支撑杆4进行运动,之后支撑杆4回运动到工件的环槽中,之后第一电动杆53带动下方的第一驱动板51向上进行运动,之后第一驱动板51带动第二支撑板52进行运动,第二支撑板52会使多个第一连杆54进行展开,从而会使第一连杆54带动第三支撑板55进行离心运动,之后第三支撑板55通过第一弹簧8带动第四支撑板57进行运动,第四支撑板57带动夹持结构6进行运动,在第三支撑板55进行运动时,会带动第二支架93进行运动,之后气箱91使固定位置,第二支架93会带动第二支架93运动,第二支架93带动活塞板96在空腔94中进行滑动,之后活塞板96会将空腔94在中的空气向外推出,从而也就是顺着气箱91向外吹出,气箱91会随着第四支撑板57一起进行运动,也就是在夹持结构6贴在环槽的内壁之前会有空气吹在内壁上,从而对内壁上的灰尘进行吹落,之后第一撑紧板61和第二撑紧板62贴在内壁上,之后由于工件的环槽是圆形的、椭圆形的以及方形的;所以下面会针对这三种形状进行不同的工作方式描述:
47.当工件的环槽为圆形时:由于支撑杆4会处于圆心的位置,从而也就是说第四支撑板57带动夹持结构6进行运动时,第四支撑板57处于圆的一个象限点上,之后也就是第一撑紧板61正好位于那个象限点的位置,之后由于圆的弧度从象限点到两侧是发生变化的,所以也就是第二撑紧板62会先与圆形的环槽内壁进行接触,并且这时第一撑紧板61并没有接触到内壁,之后第二撑紧板62表面是有弧度的,第二撑紧板62会根据圆的弧度进行旋转去
适应,之后第二撑紧板62还会发生形变更好的适应的圆的弧度,之后第二撑紧板62第四支撑板57继续推进夹持结构6进行运动,之后也就是会使第二撑紧板62向后进行运动,也就是第二撑紧板62朝着第四支撑板57的方向进行运动,之后第二撑紧板62向后运动会带动第二连杆631进行运动,第二连杆631带动第二滑块632进行运动,从而会使第二滑块632在第一导向杆64上进行滑动,两个第二滑块632相向滑动,之后第二滑块632回带动第三连杆633进行运动,之后由于第一撑紧板61是通过第三伸缩杆65连接在第四支撑板57上的,从而第一撑紧板61只会在这个方向上进行运动,之后也就是第三连杆633会带动第一撑紧板61向前去运动,之后第一撑紧板61抵在圆形的环槽内壁上,从而可以使第一撑紧板61和第二撑紧板62快速抵在内壁上,从而可以快速对工件进行定位,从而也就是第一撑紧板61和第二撑紧板62会相当于运动;
48.当圆形的环槽直径大小不一样时:
49.会有以下问题,当环槽直径太大,第一连杆54运动很长的距离之后第一撑紧板61和第二撑紧板62才会与内壁进行接触进行夹持,从而也就是第一撑紧板61和第二撑紧板62与内壁配合好之后第一连杆54运动距离很短,从而也就是第一弹簧8倍第一连杆54和第四支撑板57压缩的量很小,从而会导致第一撑紧板61和第二撑紧板62抵在内壁上的力偏小,也就是和第一弹簧8的形变量成正比的;当环槽的直径太小时,第一连杆54运动很短的距离第一撑紧板61和第二撑紧板62就与内壁配合完成,之后也就是第一连杆54还会继续运动很长的距离,从而也就是第一弹簧8会被压缩的量会很大,从而也就是第一撑紧板61和第二撑紧板62受到来自第一弹簧8的力,会有很大的力抵在环槽上;当工件比较脆弱无法承受很大的力时,需要进行适应对大小不同的环槽进行夹持时,用同样大小的力;
50.第一撑紧板61和第二撑紧板62抵在圆形的环槽上,之后圆形环槽的大小不同会导致弧度不同,也就是第一撑紧板61和第二撑紧板62之间相互运动的距离不同,从而也就是环槽直径越大,第一撑紧板61和第二撑紧板62相对运动的距离就会越小;当圆形的环槽直径越大吗,则相反;所以第一撑紧板61和第二撑紧板62相对运动带动第二滑块632进行运动的同时还会使第二滑块632带动第三滑块711一起进行运动,之后第三滑块711回带动第四连杆712和第五连杆713进行运动,多个第五连杆713和第四连杆712是相互铰接的,从而也就是会使第四连杆712和第五连杆713相互展开,从而也就是会带动第二导向杆715进行运动,第二导向杆715朝着远离第四支撑板57的方向进行运动,之后第二导向杆715会带动第五支撑板721进行运动,也就是带动两个第五支撑板721远离第四支撑板57进行运动,之后两个第五支撑板721带动第五伸缩杆722进行运动,之后第五伸缩杆722上的第六支撑板723用于使第二导向杆715和第五支撑板721的连接更稳定,之后第六支撑板723带动第七支撑板725进行运动,第六支撑板723会在第六伸缩杆724的导向下进行运动,之后第七支撑板725带动第二转轴734进行运动,之后第二转轴734会带动绕辊731和齿轮733进行运动,齿轮733与齿条732啮合会使第二转轴734进行旋转,之后也就是绕辊731进行旋转,绕辊731上设有伸展杆741,之后也就是伸展杆741进行选咋混,从而也就是绕辊731带动伸展杆741进行逆时针旋转,之后伸展杆741将绳索76卷在伸展杆741上,之后伸展杆741被卷起,从而也就是绳索76被拉动,之后绳索76经过定滑轮771拉动第一拉板591远离第四支撑板57进行运动,之后第一拉板591在运动时会通过电动调节杆594会带动第十支撑板593进行运动,之后第一弹簧8是设置在第十支撑板593和第四支撑板57之间的,也就是第一弹簧8会被放松,从
而会使第一撑紧板61和和第二撑紧板62抵在内壁上的力会进行降低,从而更好的适用于圆形环槽大小不同的工件上;
51.之后第一拉板591在运动时还会带动卡槽板751进行运动,由于第一撑紧板61和第二撑紧板62抵在内壁上会使第七支撑板725远离第四支撑板57进行运动,从而齿轮733旋转,从而会通过第一支架77带动控制杆756朝着远离第四支撑板57的方向运动一段距离,之后齿轮733即使继续旋转,控制杆756的位置也不会进行变化,之后也就是会使控制杆756带动第六连杆755进行运动,第六连杆755带动第九支撑板754在第三导向杆757上进行滑动,之后两个第九支撑板754相向运动,之后也就是会使卡块752卡在卡槽板751中,之后卡槽板751进行运动时还会进行卡住位置,也就是当第一拉板591运动停止,卡槽板751运动就会停止,之后卡槽板751会在卡块752的作用下被固定住位置,从而也就是第一拉板591固定住位置,也就是第十支撑板593固定住位置,也就是第一弹簧8的另一端固定住位置,从而使第一弹簧8施加力给第一撑紧板61和第二撑紧板62;
52.当工件的环槽为椭圆形时:
53.由于撑紧结构5是设置了四个的,分别位于支撑杆4的四个角落,也就是椭圆的四个象限点上,之后椭圆会有两个弧度很小和两个弧度很大的象限点,从而通过分别的固定对其进行区分;由于椭圆的形状特殊,弧度大的地方第四支撑板57运动的距离小,弧度小的地方,第四支撑板57运动的距离大;所以需要对这个问题进行解决;也就是通过第二电动杆746运动,带动两个圆环板745相互远离,之后带动第八支撑板744运动,通过第七连杆743带动第四滑块742在绕辊731上朝着离心方向进行滑动,从而也就是使四个伸展杆741之间的
·
距离变远,从而四个伸展杆741相互远离,之后第一撑紧板61和第二撑紧板62发生相对运动,相当于运动到同样的程度会使伸展杆741卷上绳索76的长度增加,从而也就是会使第一拉板591运动的距离增加,从而也就是会使第十支撑板593运动距离增加,从而也就是会使第一弹簧8的另一端放松的程度进行变化,从而也就是第一撑紧板61和第二撑紧板62抵在同样的弧度上,会使第一撑紧板61和第二撑紧板62受到的力进行降低,从而对椭圆弧度大的一侧进行适配,从而也就是由于弧度大以及第一撑紧板61和第二撑紧板62运动的距离短,会导致第一拉板591和第十支撑板593运动的距离短,从而会导致第一撑紧板61和第二撑紧板62抵在内壁上的力增加,之后通过伸展杆741增加第一拉板591和第十支撑板593运动的距离,使其可以解决这一问题,对于椭圆上弧度小的问题,通过第二电动杆746带动两个圆环板745相互靠近的运动,使其起到相反的作用,也就是将第一拉板591和第十支撑板593运动的距离使其可以适应椭圆弧度小的位置,从而更好的对椭圆进行夹持固定,使第一撑紧板61和第二撑紧板62可以更好的贴在椭圆形的内壁上;
54.当工件为方形时:
55.第一撑紧板61和第二撑紧板62不会发生相对位移,会直接贴在直边上,从而也就是直接使第一弹簧8作用力给第一撑紧板61和第二撑紧板62,并对方形进行夹持;
56.当工件的重量很重,通过电动调节杆594运动来调节第一拉板591和第十支撑板593之间的距离,也就是使第一弹簧8被压缩的程度进行增加,从而使其后续的操作第一弹簧8作用给第一撑紧板61和第二撑紧板62的力增加,从而会使第一撑紧板61和第二撑紧板62更好的夹持住工件。
57.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1