一种齿轮加工机器人
1.本发明设计一种齿轮加工机器人,即一种大模数齿轮加工机器人,它具有加工操作空间大、可实现刀具和齿轮工件轻量化配置的特点,属于智能制造、机器人加工技术领域。
背景技术:
2.齿轮是量大面广的关键基础零部件,齿轮传动是应用最广泛的机构和传动装置。大模数齿轮齿条的接触强度在齿轮复杂传动过程中具有重要地位,因此加工工艺十分关键。目前,大模数齿轮主要采用专用机床进行加工,齿轮专用机床是一种面向机床操作人员、以单一具体工艺位核心的数字化制造装备,而机床面向操作人员的特点使得某些齿轮的全自动化加工面临许多困难,不能实现无人化和智能化加工,并且齿轮机床刀具种类繁多、规格各异、工作空间狭小、难以集成工艺上下游操作及各种辅助操作。随着齿轮行业的快速发展和工业自动化水平的提高,齿轮专用机床的这些特点已经无法适应智能制造的需求和发展趋势。
技术实现要素:
3.(1)目的
4.本发明的目的在于提供一种齿轮加工机器人,即一种大模数齿轮加工机器人,以针对大模数齿轮的加工和研究。具有工作空间大、柔性高、可配置性强及成本较低的特点,可为齿轮加工制造提供理论依据和对加工精度进行研究。
5.(2)技术方案
6.本发明提出的一种大模数齿轮加工机器人,它包括:固定基座组件、机械臂组件和夹具组件;它们相互之间的位置关系是:固定基座组件与机械臂组件前后放置并留有一定的移动裕量用于机械臂组件的移动和加工动作,夹具组件通过螺栓安装在机械臂组件末端;
7.本发明的一种齿轮加工机器人,即一种大模数齿轮加工机器人,其加工方案为,将刀具安装在机械臂组件,大齿轮工件安装在固定基座组件;所述大模数齿轮加工机器人的工作空间范围可通过所述齿轮工件的典型规格和参数进行定制化设计;
8.所述的固定基座组件包括底座(1)、工件轴(2)、大模数齿轮工件(3);它们相互之间的位置关系是:底座(1)与工件轴(2)通过轴承连接,工件轴(2) 和大模数齿轮工件(3)通过键连接;
9.该底座(1)的形状构造是:用不锈钢加工为圆柱形外壳,内置电机驱动工件轴(2)运动;
10.该工件轴(2)的形状构造是:圆柱型,顶部加工键槽与大模数齿轮工件(3) 连接;
11.该大模数齿轮工件(3)的型状构造是:形状根据加工需求分为直齿轮、斜齿轮、螺旋锥齿轮等形状类型;
12.该夹具组件包括刀盘(4)、刀盘电主轴(5)、末端执行器(6)、执行器旋转关节(7);它们相互之间的关系是:末端执行器(6)夹持刀盘电主轴(5)、刀盘(4)和刀盘电主轴(5)通过夹头和螺帽固定,执行器旋转关节(7)与末端执行器(6)通过螺纹连接;
13.该刀盘(4)选用现有产品,其型号为中国沃尔德沃尔德fmp040sa22-be12-08;
14.该刀盘电主轴(5)选用现有产品,其型号为中国睿克斯mpm-830/40e25;
15.该末端执行器(6)的型状构造是:c型结构,其顶部开螺纹孔用于与执行器旋转关节(7)的螺纹连接;
16.该执行器旋转关节(7)的型状构造是:形状为圆柱,车螺纹用于连接末端执行器(6);
17.该机械臂组件包括1级机械臂(8)、俯仰关节(9)、2级机械臂(10)、旋转关节(11)、底座旋转关节(12)、机械臂底座(13);它们相互之间的关系是:1 级机械臂(8)与2级机械臂(10)均与俯仰关节(9)通过轴承连接,2级机械臂(10)通过轴承与底座旋转关节(12)连接,底座旋转关节(12)通过轴承与机械臂底座(13)连接,该机械臂底座(13)放置在地面;
18.该1级机械臂(8)与该2级机械臂(10)的形状构造是:由合金钢切割为长方体;
19.该俯仰关节(9)和该旋转关节(11)、底座旋转关节(12)的形状构造是:圆柱形外壳,输入输出轴之间通过法兰连接;
20.所述俯仰关节(9)和旋转关节(11)、底座旋转关节(12)具有旋转定位和传输动力的功能,可实时精确保证所述刀具和所述大模数齿轮工件的相对位置;
21.该机械臂底座(13)的形状构造是:圆盘形,顶部设置承重支撑架,底部打螺栓孔;
22.该执行器旋转关节(7)、该俯仰关节(9)、该旋转关节(11)、该底座旋转关节(12)可以实现所述齿轮工件和所述刀具之间6个自由度的相对运动,其中所述机械臂组件可以实现5个自由度的运动;
23.本发明的有益效果为:
24.1.本发明提出的一种齿轮加工机器人,即一种大模数齿轮加工机器人,利用了机器人工作空间大、灵活性强、易于定制化配置的优势解决了专用机床空间狭小、全自动化困难、难以集成上下游操作的缺陷;
25.2.本发明提出的一种齿轮加工机器人,即一种大模数齿轮加工机器人,可以填补加工机器人的研究空白,为复杂齿轮工件的加工探索了新的加工方式,为齿轮的自动化、智能化加工的发展提供了理论依据;
26.3.本发明提出的一种大模数齿轮加工机器人通过底座承担一个方向的自由度的方式,降低机械臂组件的设计难度;
27.4.本发明所述大模数齿轮加工机器人,其结构科学,工艺性好,具有广阔推广应用价值。
附图说明
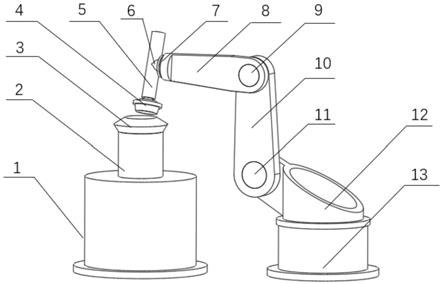
28.图1是本发明实施例提供的一种大模数齿轮加工机器人结构示意图。
29.图2是本发明实施例中刀盘结构示意图。
30.图3是本发明实施例中机械臂末端执行结构示意图。
31.图4是本发明实施例中底座及大模数齿轮工件轴结构示意图。
32.图5是本发明实施例中大齿轮工件结构示意图。
33.其中:1-底座;2-工件轴;3-大模数齿轮工件;4-刀盘;5-刀盘电主轴; 6-末端执行器;7-执行器旋转关节;8-1级机械臂;9-俯仰关节;10-2级机械臂; 11-旋转关节;12-底座旋转关节;13-机械臂底座;
具体实施方式
34.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整的描述,显然,所述实施例是本技术一部分实施例,而不是全部的实施例。通常在此附图中描述和示出的本技术实施例可以以各种不同的配置来布置和设计;
35.因此,一下对在附图中提供和说明本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的实施例;基于本技术的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
36.请参见图1-5,详情如下:
37.本发明所述的一种齿轮加工机器人,即一种大模数齿轮加工机器人,采用串联式设计方法,根据加工工件方案针对鲁棒性和刚度要求的多种配置,也可采用并联式和混联式齿轮加工机器人的设计方法;
38.本发明提出的一种一种齿轮加工机器人,即一种大模数齿轮加工机器人,它包括:固定基座组件、机械臂组件和夹具组件,它们相互之间的位置关系是:固定基座组件与机械臂组件前后放置并留有一定的移动裕量用于机械臂组件的移动和加工动作,夹具组件通过螺栓安装在机械臂组件末端;
39.一种大模数齿轮加工机器人,它包括:固定基座和机械臂主体,所述固定基座与所述机械臂主体前后放置,所述固定基座位于所述机械臂主体左后方;
40.本实施例的齿轮加工方案为,见图1,机械臂末端执行器安装刀具,底座安装大模数齿轮工件,其中可根据齿轮的类型修改刀盘、刀盘电主轴、工件轴的规格和型号,并且调整机械臂的工作空间范围,基于齿轮类型调整加工刀具的类型,例如圆柱齿轮加工刀具和锥齿轮加工刀具,其中锥齿轮加工刀具可分为直齿锥齿轮刀具、弧齿锥齿轮刀具及延长外摆线锥齿轮刀具。本发明提出的可实现多种复杂齿轮的加工;
41.方案b:见图2、图3、图4、图5,本实施例选用大型螺旋锥齿轮为待加工工件进行加工方案的说明,加工方案的齿轮加工机器人结构中,所述的固定基座组件包括底座(1)、工件轴(2)、大模数齿轮工件(3),它们相互之间的位置关系是:底座(1)与工件轴(2)通过轴承连接,工件轴(2)和大模数齿轮工件(3)通过键连接;
42.该底座(1)的形状构造是:用不锈钢加工为圆柱形外壳,内置电机驱动工件轴(2)运动;
43.该工件轴(2)的形状构造是:圆柱型,顶部加工键槽与大模数齿轮工件(3) 连接;
44.该大模数齿轮工件(3)的型状构造是:形状根据加工需求分为直齿轮、斜齿轮、螺旋锥齿轮等形状类型;
45.见图3,该夹具组件包括刀盘(4)、刀盘电主轴(5)、末端执行器(6)、执行器旋转关
节(7),它们相互之间的关系是:末端执行器(6)夹持刀盘电主轴 (5)、刀盘(4)和刀盘电主轴(5)通过夹头和螺帽固定,执行器旋转关节(7) 与末端执行器(6)通过螺纹连接;
46.该刀盘(4)选用现有产品,其型号为中国沃尔德fmp040sa22-be12-08;
47.该刀盘电主轴(5)选用现有产品,其型号为中国睿克斯mpm-830/40e25;
48.该末端执行器(6)的型状构造是:c型结构,其顶部开螺纹孔用于与执行器旋转关节(7)的螺纹连接;
49.该执行器旋转关节(7)的型状构造是:形状为圆柱,车螺纹用于连接末端执行器(6);
50.见图1和图2,该机械臂组件包括1级机械臂(8)、俯仰关节(9)、2级机械臂(10)、旋转关节(11)、底座旋转关节(12)、机械臂底座(13),它们相互之间的关系是:1级机械臂(8)与2级机械臂(10)均与俯仰关节(9)通过轴承连接,2级机械臂(10)通过轴承与底座旋转关节(12)连接,底座旋转关节 (12)通过轴承与机械臂底座(13)连接,机械臂底座放置在地面;
51.该1级机械臂(8)与该2级机械臂的形状构造是:由合金钢切割为长方体;
52.该俯仰关节(9)和该旋转关节(11)、底座旋转关节(12)的形状构造是:圆柱形外壳,内置测量定位和动力传输器件,输入输出轴之间通过法兰连接;
53.所述的关节内部设置的测量器件编码器、光栅可以实时采集上述各个关节的角度与长度信息并反馈给上级控制系统实时精确定位所述刀具和所述大模数齿轮工件的相对位置;
54.该机械臂底座(13)的形状构造是:圆盘形,顶部设置承重支撑架,底部打螺栓孔;
55.进一步地,本实施例使机械臂组件始终承载较低的负载,可以提高机械臂的灵活性同时使定位精度更高,延长机械臂的使用寿命。通过在底座(1)内部设置电机和编码器,同时将所述执行器关节(7)、俯仰关节(9)、旋转关节(11)、底座旋转关节(12)外部引线连接到上级控制系统;
56.本实施例可以在刀具和工件之间形成6个自由度,详情如下,上述提到的关节通过关节内部设置的减速器和轴承给机械臂传递运动,首先将待加工大模数型锥齿轮工件(3)安装至工件轴(2)上,通过上级控制系统的控制开启齿轮加工机器人的工作模式,所述执行器旋转关节(7)与所述俯仰关节(9)与所述旋转关节(11)共同作用可使刀盘(4)实现2个自由度的旋转运动,所述俯仰关节 (9)、所述旋转关节(11)和所述底座旋转关节(12)共同作用可实现刀盘(4) 三个自由度的直线运动,故基于大模数齿轮工件(3)的一个旋转自由度,所述大模数齿轮工件(3)和所述刀盘(4)可以实现6个自由度的相对运动。
57.具体的实验方法,主要包含如下步骤:
58.第一步,首先由待加工大模数齿轮工件的型号、类型确定加工方案,并选择合适的刀具,安装刀具和工件,调整底座和机械臂组件的间距与上位机程序。
59.第二步,开始实验,通过程序控制加工过程中刀具与加工工件在空间的相对位置关系。
60.第三步,待加工指令运行结束,实验结束,分离刀具和加工工件,检查工件加工质量和刀具磨损情况,关闭试验机。
61.最后应说明的是:本领域的技术人员可以对本发明实施例进行各种修改和变型,
倘若这些修改和变型在本发明权利要求及其等同技术的范围之内,则这些修改和变型也在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1