一种CCTV机器人辅助进管装置的制作方法
一种cctv机器人辅助进管装置
技术领域
1.本技术涉及管道检测的领域,尤其是涉及一种cctv机器人辅助进管装置。
背景技术:
2.管道检测机器人是一种可沿管道内部自动行走、携带一种或多种传感器,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统。管道机器人能够对管道内的锈层、结垢腐蚀、穿孔、裂纹等状况进行探测和摄像,同时记录管道内的状况,从而将地下隐蔽管线变为在电脑上可见的内部录像,方便管理部门根据管道状况作出最合理的管道处理方案。
3.相关技术中,当管道检测机器人进入较低的管道时,需要在管道检测机器人上系上绳子,然后工作人员握住绳子,将管道机器人放入较低的管道中,进行检测。
4.针对上述中的相关技术,发明人认为绳子长期使用后易老化断裂,易对管道检测机器人进入管道造成影响,不易于管道检测机器人长期稳定地进入管道。
技术实现要素:
5.为了使管道检测机器人易长期稳定地进入管道,本技术提供一种cctv机器人辅助进管装置。
6.本技术提供的一种cctv机器人辅助进管装置采用如下的技术方案:一种cctv机器人辅助进管装置,包括放置板和手持杆,所述手持杆的一端与放置板连接,所述手持杆的另一端向远离放置板的方向延伸,所述手持杆的长度方向与放置板的板面方向相交。
7.通过采用上述技术方案,当管道检测机器人需要进入管道时,将管道检测机器人放在放置板上,工作人员再握住手持杆远离放置板的一端,将放置板放入管道内,从而将管道检测机器人放入较低的管道中。工作人员可根据实际情况设置手持杆的长度以补足低部管道所处的高度,相较于绳子,管道检测机器人易长期稳定地进入管道。
8.可选的,所述放置板上设置有限位组件和转动组件,所述限位组件包括第一挡板和第二挡板,所述第一挡板和第二挡板围成限位腔,所述限位腔用于容纳管道检测机器人;所述第一挡板通过转动组件转动安装在放置板上,所述第一挡板可转动至第一挡板的顶面低于放置板的顶面。
9.通过采用上述技术方案,将管道检测机器人放入限位腔内,第一挡板和第二挡板能够对管道检测机器人进行限位,从而使管道机器人在放入较低处的管道的过程中,不易从放置板上滑落。当管道检测机器人放入较低处的管道后,通过转动组件转动第一挡板,进而使管道检测机器人能够从放置板上滑落至管道内,实现将管道检测机器人放入管道内进行检测。
10.可选的,所述转动组件包括转动电机、驱动绳、驱动按钮和扭簧,所述第一挡板通过扭簧与放置板转动连接,所述转动电机设置在手持杆上,所述驱动绳的一端与第一挡板
连接,所述驱动绳的另一端与转动电机的转轴连接,所述驱动按钮与转动电机电连接用于控制转动电机的启动与关闭。
11.通过采用上述技术方案,按下驱动按钮,转动电机转动,松开驱动按钮,转动电机则停止转动。当第一挡板需要转动时,按下驱动按钮,从而启动转动电机,转动电机的转轴转动,从而将驱动绳缠绕于转动电机的转轴上,第一挡板则在驱动绳的作用下实现转动。
12.可选的,所述转动组件还包括工字轮,所述工字轮的一端与手持杆转动连接,所述工字轮的另一端与转动电机的转轴连接,所述驱动绳通过与工字轮连接从而与转动电机的转轴连接。
13.通过采用上述技术方案,转动电机的转轴带动工字轮转动,从而使驱动绳缠绕于工字轮上,工字轮能够对驱动绳进行限位,使驱动绳进行稳定的缠绕。
14.可选的,所述放置板的侧面上开设有限位通孔,所述驱动绳穿过限位通孔。
15.通过采用上述技术方案,限位通孔能够对驱动绳进行限位,提高驱动绳移动的稳定性。
16.可选的,所述手持杆包括若干外筒和若干内筒,所述外筒相较于内筒靠近放置板,所述转动电机设置于远离放置板的内筒上,所述驱动按钮包括一档按钮、二挡按钮和复位按钮,所述一档按钮下转动电机转动的圈数小于二挡按钮下转动电机转动的圈数,所述一档按钮用于控制第一挡板转动,所述二挡按钮用于驱动内筒收缩于外筒内,所述复位按钮用于控制转动电机反向转动以使驱动绳复位;所述手持杆上设置有固定组件,所述固定组件用于将内筒固定于外筒上。
17.通过采用上述技术方案,当第一挡板需要转动时,按下一档按钮,转动电机转动较少的圈数,使得驱动绳缠绕较少的圈数,实现第一挡板转动至第一挡板的顶面低于放置板的顶面,从而使管道检测机器人能够落下。可根据实际情况设置外筒和内筒的数量,按下二挡按钮,内筒依次收缩入外筒内,根据管道所在位置的高度按下或松开二挡按钮,从而逐级调节手持杆的长度,以适应不同位置高度的管道。
18.可选的,所述固定组件包括弹片和连接在弹片上的限位钮,所述弹片设置在内筒内,所述内筒的侧壁上开设有第一限位孔,所述外筒两端的侧壁上开设有第二限位孔,所述限位钮同时穿过第一限位孔和外筒其中一端的第二限位孔。
19.通过采用上述技术方案,向靠近内筒中轴线的方向按压限位钮,限位钮在弹片的作用下向靠近内筒中轴线的方向移动,按下二挡按钮启动转动电机,在驱动绳的作用下内筒相对于外筒滑动,实现内筒收缩入外筒内部,直至限位钮从外筒另一端的第二限位孔中穿出,实现内筒相对于外筒的固定,从而调节手持杆的长度。
20.可选的,所述外筒内设置有复位弹簧,所述复位弹簧靠近内筒的一端与弹片连接,所述复位弹簧处于自然状态下时,所述限位钮同时穿过外筒远离放置板一端的第一限位孔和第二限位孔。
21.通过采用上述技术方案,当内筒收缩在外筒内时,复位弹簧处于压缩状态;当手持杆的长度需要伸长时,按下复位按钮使转动电机反向转动,从而使驱动绳松弛,此时按压限位钮,复位弹簧为恢复自然状态而自动将内筒弹起,从而实现手持杆长度的增加。
22.可选的,所述手持杆靠近放置板的一端转动安装在放置板上,所述手持杆可转动至手持杆的侧面与放置板的底面抵接,所述内筒收缩于外筒内后手持杆的长度与放置板的
长度相近;所述手持杆上设置有固定件,所述固定件用于固定转动后的手持杆。
23.通过采用上述技术方案,当管道检测机器人用进入装置不需要使用时,将内筒收缩于外筒内,转动手持杆至手持杆的侧面与放置板的底面抵接。由于内筒收缩于外筒内后手持杆的长度与放置板的长度相近,因此能够有效节省空间,便于管道检测机器人用进入装置的放置。
24.可选的,所述放置板的底面上设置有至少两块支撑板,所述支撑板的宽度不小于手持杆的最大直径。
25.通过采用上述技术方案,支撑板能够支撑于地面上,便于管道检测机器人用进入装置的稳定放置。
26.综上所述,本技术包括以下至少一种有益技术效果:1.当管道检测机器人需要进入管道时,将管道检测机器人放在放置板上,工作人员再握住手持杆远离放置板的一端,将放置板放入管道内,从而将管道检测机器人放入较低的管道中,工作人员可根据实际情况设置手持杆的长度以补足低部管道所处的高度,相较于绳子,管道检测机器人易长期稳定地进入管道;2.将管道检测机器人放入限位腔内,第一挡板和第二挡板能够对管道检测机器人进行限位,从而使管道机器人在放入较低处的管道的过程中,不易从放置板上滑落,当管道检测机器人放入较低处的管道后,通过转动组件转动第一挡板,进而使管道检测机器人能够从放置板上滑落至管道内,实现将管道检测机器人放入管道内进行检测;3.通过外筒和内筒的设置,按下二挡按钮,内筒依次收缩入外筒内,根据管道所在位置的高度按下或松开二挡按钮,从而逐级调节手持杆的长度,以适应不同位置高度的管道。
附图说明
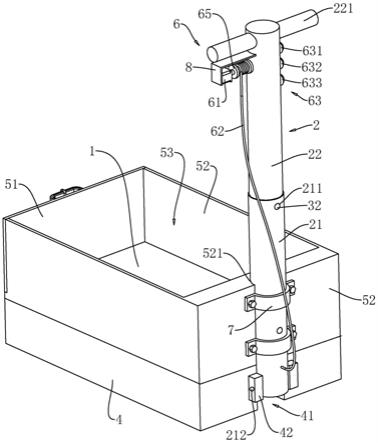
27.图1是本技术实施例一种cctv机器人辅助进管装置的整体结构示意图。
28.图2是本技术实施例中用于展示内筒内部结构的示意图。
29.图3是本技术实施例中用于展示放置板底部的结构示意图。
30.附图标记说明:1、放置板;11、限位通孔;2、手持杆;21、外筒;211、第二限位孔;212、转动柱;22、内筒;221、手持把手;222、第一限位孔;3、固定组件;31、弹片;311、开口端;312、闭合端;3121、连接盘;313、连接杆;314、接触板;32、限位钮;4、支撑板;41、安装通槽;42、安装块;5、限位组件;51、第一挡板;511、连接把手;52、第二挡板;521、让位槽;53、限位腔;6、转动组件;61、转动电机;62、驱动绳;63、驱动按钮;631、一档按钮;632、二挡按钮;633、复位按钮;64、扭簧;65、工字轮;7、固定件;8、安装板;9、复位弹簧。
具体实施方式
31.以下结合附图1-3对本技术作进一步详细说明。
32.本技术实施例公开一种cctv机器人辅助进管装置。参照图1,cctv机器人辅助进管装置包括放置板1和手持杆2,手持杆2的底端与放置板1长度方向一端连接,手持杆2的顶端向远离放置板1的方向延伸,手持杆2的长度方向与放置板1的板面方向相交,本实施例中,手持杆2的长度方向垂直于放置板1的板面方向。
33.当管道检测机器人需要进入管道时,将管道检测机器人放在放置板1上,工作人员再握住手持杆2远离放置板1的一端,将放置板1放入管道内,从而将管道检测机器人放入较低的管道中。工作人员可根据实际情况设置手持杆2的长度以补足低部管道所处的高度,相较于绳子,管道检测机器人易长期稳定地进入管道。
34.参照图1和图2,手持杆2包括若干外筒21和若干内筒22,本实施例中,外筒21和内筒22各有一个。外筒21相较于内筒22靠近放置板1,内筒22滑动安装在外筒21内,内筒22可滑动至收缩于内筒22内。可根据实际情况设置外筒21和内筒22的数量,根据管道所在位置的高度逐级调节手持杆2的长度,以适应不同位置高度的管道。内筒22周侧壁的顶端固定连接有手持把手221,以便于工作人员握住。
35.参照图1和图2,内筒22上安装有有固定组件3,固定组件3包括倒“v”形弹片31和限位钮32。弹片31位于内筒22内,弹片31包括开口端311和闭合端312,弹片31的闭合端312通过连接盘3121固定连接在内筒22的内壁上,限位钮32有相对设置有两个且固定连接在弹片31的开口端311上。内筒22的侧壁上开设有两个第一限位孔222,外筒21两端的侧壁上各开设有两个第二限位孔211。当手持杆2需要伸长或收缩时,向靠近内筒22中轴线的方向按压限位钮32,并使内筒22在外筒21内滑动,实现手持杆2的伸缩。手持杆2处于伸长状态时,限位钮32同时穿过第一限位孔222和外筒21顶端的第二限位孔211,实现手持杆2伸长时的固定;手持杆2处于收缩状态时,限位钮32则同时穿过第一限位孔222和外筒21底端的第二限位孔211,实现手持杆2收缩时的固定。
36.参照图1和图3,放置板1的底面上设置有至少两块支撑板4,本实施例中,支撑板4与放置板1的底面一体成型且有三块,三块支撑板4依次固定连接,其中两块支撑板4位于放置板1宽度方向的两侧,另一块支撑板4位于放置板1长度方向的一端。位于放置板1长度方向一端的支撑板4的侧面上开设有安装通槽41,安装通槽41贯穿位于放置板1长度方向一端的支撑板4的底面。支撑板4靠近安装通槽41处的外侧壁上焊接有两个安装块42,两个安装块42分别位于安装通槽41宽度方向的两侧。
37.参照图1和图3,外筒21底部的周侧壁上固定连接有两个转动柱212,两个转动柱212沿外筒21的径向相对设置,每个转动柱212对应一个安装块42,转动柱212穿过对应的安装块42从而将外筒21转动安装在安装块42上,进而将手持杆2的底端转动安装在放置板1上,手持杆2可转动至手持杆2的侧面与放置板1的底面抵接,安装通槽41则用于为手持杆2的转动让位。
38.参照图1和图3,内筒22收缩于外筒21内后手持杆2的长度与放置板1的长度相近,当管道检测机器人用进入装置不需要使用时,将内筒22收缩于外筒21内,转动手持杆2至手持杆2的侧面与放置板1的底面抵接,以节省空间,便于管道检测机器人用进入装置的放置。支撑板4的宽度不小于手持杆2的最大直径,即支撑板4的宽度不小于外筒21的直径。支撑板4能够支撑于地面上,代替手持杆2的周侧壁与地面接触,便于管道检测机器人用进入装置的稳定放置。
39.参照图1和图3,放置板1上安装有限位组件5和转动组件6,限位组件5包括一块第一挡板51和三块第二挡板52,第一挡板51和第二挡板52沿放置板1顶面的边缘依次设置并围成长方形的限位腔53,限位腔53用于容纳管道检测机器人,使管道机器人在放入较低处的管道的过程中,不易从放置板1上滑落。第二挡板52与放置板1一体成型,第一挡板51通过
转动组件6转动安装在放置板1上,第一挡板51可转动至第一挡板51的顶面低于放置板1的顶面。当管道检测机器人放入较低处的管道后,通过转动组件6转动第一挡板51,进而使管道检测机器人能够从放置板1上滑落至管道内,实现将管道检测机器人放入管道内进行检测。
40.参照图1和图3,与第一挡板51相对设置的一块第二挡板52的厚度大于其余两块第二挡板52的厚度,与第一挡板51相对设置的第二挡板52的侧面上开设有横截面为半圆形的让位槽521,让位槽521沿第一挡板51的厚度方向贯穿。外筒21的底端位于让位槽521内。手持杆2上安装有固定件7,本实施例中,固定件7为固定半环,固定半环沿手持杆2的长度方向排列有两个,固定半环的内壁与外筒21的周侧壁抵接,固定半环可通过螺钉固定安装在第一挡板51上,固定半环亦可通过螺钉固定在放置板1的底面上,从而对手持杆2进行固定。
41.参照图1和图3,转动组件6包括转动电机61、驱动绳62、驱动按钮63、扭簧64和工字轮65,内筒22远离放置板1的一端的周侧壁上固定连接有“l”状的安装板8,安装板8位于手持把手221的下方,转动电机61固定安装在安装板8上。工字轮65的一端与手持杆2转动连接,工字轮65的另一端与转动电机61的转轴连接。第一挡板51通过扭簧64与放置板1转动连接,第一挡板51上固定连接有连接把手511,放置板1的侧面上开设有沿放置板1长度方向贯穿的限位通孔11。驱动绳62的一端通过与连接把手511固定连接,从而与第一挡板51固定连接,驱动绳62的另一端穿过限位通孔11和外筒21底端的周侧壁后与工字轮65的中部固定连接,从而与转动电机61的转轴连接。驱动按钮63与转动电机61电连接用于控制转动电机61的启动与关闭。
42.按下驱动按钮63,转动电机61转动,松开驱动按钮63,转动电机61则停止转动。当第一挡板51需要转动时,按下驱动按钮63,从而启动转动电机61,转动电机61的转轴转动,从而将驱动绳62缠绕于转动电机61的转轴上,第一挡板51则在驱动绳62的作用下实现转动。限位通孔11则用于对驱动绳62进行限位,提高驱动绳62移动的稳定性。
43.参照图1,驱动按钮63包括由上至下依次设置的一档按钮631、二挡按钮632和复位按钮633,一档按钮631用于控制第一挡板51转动,二挡按钮632用于驱动内筒22收缩于外筒21内,一档按钮631下转动电机61转动的圈数小于二挡按钮632下转动电机61转动的圈数。复位按钮633用于控制转动电机61反向转动以使驱动绳62复位。当第一挡板51需要转动时,按下一档按钮631,转动电机61转动较少的圈数,使得驱动绳62缠绕较少的圈数,实现第一挡板51转动至第一挡板51的顶面低于放置板1的顶面,从而使管道检测机器人能够落下。按下二挡按钮632,第一挡板51处于第一挡板51的顶面低于放置板1的顶面的状态。同时,内筒22收缩入外筒21内,以调节手持杆2的长度,以适应不同位置高度的管道。
44.参照图1和图2,弹片31的闭合端312通过连接杆313固定连接有接触板314,外筒21内固定连接有复位弹簧9,复位弹簧9靠近内筒22的一端通过接触板314与弹片31连接,复位弹簧9处于自然状态下时,限位钮32同时穿过外筒21远离放置板1一端的第一限位孔222和第二限位孔211。当内筒22收缩在外筒21内时,复位弹簧9处于压缩状态;当手持杆2的长度需要伸长时,按下复位按钮633使转动电机61反向转动,从而使驱动绳62松弛,此时按压限位钮32,复位弹簧9为恢复自然状态而自动将内筒22弹起,从而实现手持杆2长度的增加。
45.本技术实施例一种cctv机器人辅助进管装置的实施原理为:当管道检测机器人需要进入管道时,将管道检测机器人放在限位腔53内,工作人员再握住手持把手221,将放置
板1放入管道内,按下一档按钮631,通过转动电机61和驱动绳62驱动第一挡板51转动至第一挡板51的顶面低于放置板1的顶面,继而使管道检测机器人进入较低的管道中。相较于绳子,管道检测机器人易长期稳定地进入管道。
46.工作人员可根据管道所处位置的高度设置手持杆2的长度以补足低部管道所处的高度,即通过外筒21和内筒22的数量设置手持杆2的长度。当cctv机器人辅助进管装置需要放置时,按下二挡按钮632,并按压限位钮32,内筒22收缩入外筒21内,以调节手持杆2的长度,继而再将固定半环从第一挡板51上取下,转动手持杆2至手持杆2的周侧壁与放置板1的底面抵接,再通过固定半环将手持杆2固定在放置板1的底面上,以节省空间。
47.当cctv机器人辅助进管装置需要放置时,取下放置板1底面上的固定半环,转动外筒21的底部至让位槽521内,并通过固定半环将外筒21固定在第一挡板51上。按下复位按钮633,转动电机61反向转动使得驱动绳62松弛,复位弹簧9为恢复自然状态而自动将内筒22弹起,从而实现手持杆2长度的增加,并通过限位钮32穿过外筒21顶端的第二限位孔211实现外筒21与内筒22的相对固定。第一挡板51则在扭簧64的作用下实现复位。
48.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1