基于大数据聚类的工业机器人控制方法与流程
1.本发明涉及机器人控制技术领域,尤其涉及基于大数据聚类的工业机器人控制方法。
背景技术:
2.当前,工业机器人的出现推动了工业领域现代化的发展,并逐渐成为工业控制当中不可被取代的重要装备,社会需求的不断扩大,使得生产力得到了快速的发展,对于劳动力的需要也逐渐增加,其中以重复劳动的分量尤为突出,而机器人的出现完美的解决了这一问题;
3.当前工业生产领域中,机器人的使用已经形成了一定的数量和规模,但工业机器人的自主研发能力和应用水平仍然未达到预期标准,对机器人的控制精度不够高,运行轨迹偏差大,因此,本发明提出基于大数据聚类的工业机器人控制方法以解决现有技术中存在的问题。
技术实现要素:
4.针对上述问题,本发明提出基于大数据聚类的工业机器人控制方法,该基于大数据聚类的工业机器人控制方法利用大数据聚类对海量数据的均匀遍历特性对初始值及噪声进行调试,有效提高数据的聚类性能,并具备计算量小、实时性高的优势,提高了对工业机器人的控制能力。
5.为实现本发明的目的,本发明通过以下技术方案实现:基于大数据聚类的工业机器人控制方法,包括以下步骤:
6.步骤一:控制连接
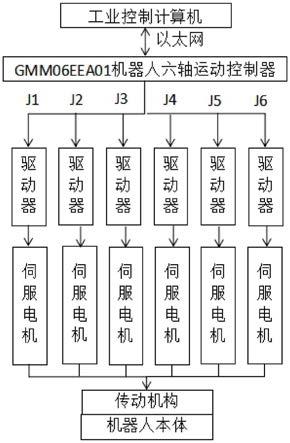
7.利用工业控制计算机作为系统的上位机结构,选择gmm06eea01机器人六轴运动控制器将工业控制计算机与伺服电机、驱动器相连,利用伺服电机配合传动结构控制机器人本体;
8.步骤二:建立数据集
9.基于大数据聚类的线性调频控制信号拟合,先建立控制系统中大数据分布式结构模型,根据模糊控制的概念,对控制系统中的大数据模糊控制进行研究,建立控制系统中海量控制数据的有限数据集;
10.步骤三:信号拟合
11.利用模糊控制和控制系统的拟合思想,将控制系统中的大数据信息流的线性调频信号拟合处理,结合大数据聚类算法,对控制系统的大数据信息特征点进行计算,完成对控制系统中线性调频控制信号的拟合;
12.步骤四:运行轨迹规划
13.在工业控制计算机上进行整体的轨迹规划,在gmm06eea01机器人六轴运动控制器上运用轮廓方式协调并控制工业机器人各个轴点的运动,完成工业机器人运行轨迹规划;
14.步骤五:控制系统整合
15.利用示教方式完成工业机器人生产作业的整个过程,并在过程中生成工业机器人生产作业文件,实现示教再现与轨迹规划的结合,将控制系统整合;
16.步骤六:示教界面设计
17.示教界面选择由qt company开发的跨平台c图形用户界面应用程序开发框架,在界面上增加工业机器人轴操作按钮、速度控制按钮和示教坐标空间选择按钮,并在其中加入工业机器人作业指令信号集;
18.步骤七:再现模块设计
19.再现模块选用另一个qt company开发的跨平台c++应用程序开发框架,并在对话框当中调入通过示教过程已经生成的示教作业文件,当设置好全部的运行次数参数后,开始工业机器人运行,并再现机器人的作业任务。
20.进一步改进在于:所述步骤一中,gmm06eea01机器人六轴运动控制器通过以太网和工业控制计算机连接,gmm06eea01机器人六轴运动控制器通过ethercat与伺服高速通信,实现机器人的精准位姿控制,gmm06eea01机器人六轴运动控制器通过ethernet总线与工业pc、示教器、hmi工业现场设备通讯,实现机器人的示教和监控。
21.进一步改进在于:所述步骤二中,有限数据集为:其中,y表示有限数据集合;n表示控制系统中的大数据分布式结构模型中包含的样本个数;r表示任意范数下的大数据聚类矢量空间。
22.进一步改进在于:所述步骤二中,当有限数据集合y的聚类信道拟合因子为0时,此时满足公式(1):
[0023][0024]
式中,ρ表示聚类信道拟合因子;h表示大数据聚类的迭代次数;sgn表示符号函数。
[0025]
进一步改进在于:所述步骤三中,计算的公式为:
[0026]
x(a,b)=∑[(ai,bi)-(ai+δa,bi+δb)]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0027]
式中,x(a,b)表示特征点函数;δa和δb表示控制系统大数据信息流的二维特征位移;(ai,bi)表示线性调频特征,根据公式(2),完成对控制系统中线性调频控制信号的拟合。
[0028]
进一步改进在于:所述步骤四中,具体的规划流程为:
[0029]
s1:利用插补轨迹算法构建轨迹数学方程,通过计算得出下一个插补点的具体位置坐标;
[0030]
s2:利用运动学逆向求解,得出插补点坐标上各个关节的转动角度,并得到工业机器人关节插补点的位置以及与上一插补点之间存在的角度偏差;
[0031]
s3:计算工业机器人各个关节的增量值,并将增量值写入dms格式的文件当中;
[0032]
s4:判断插补是否结束,当未完成相应的插补操作,则重新返回到步骤,当完成插补操作,则将dms格式文件载入到gmm06eea01机器人六轴运动控制器中,并执行dms格式文件中相应的指令控制信号,完成工业机器人运行轨迹规划。
[0033]
进一步改进在于:所述步骤五中,作业文件是以机器人控制编程语言和控制数据
为核心的控制语句,在每条控制语句中都包含各项作业指令的信号集和相应的参数信息,其中,选用的工业机器人编程语言包括三种:决策类、协调类和执行类。
[0034]
进一步改进在于:所述步骤五中,在作业指令的信号集中,包含对工业机器人的运动指令信号、输入和输出指令信号、计算指令信号和控制指令信号,运动指令信号包括前进、后退、旋转、平移;计算指令信号包括加法、减法、乘法、除法;控制指令信号包括等待、呼叫、跳转,其中,运动指令信号的完成涉及到直线、弧线以及轨迹规划,从而实现示教再现与轨迹规划的结合,将控制系统整合,提高系统性能。
[0035]
进一步改进在于:所述步骤六中,示教界面中,当用户选择指令信号集中时,相关界面窗口自动隐藏或显示。
[0036]
进一步改进在于:所述步骤七中,调入通过示教过程已经生成的示教作业文件时,将其译码,从而使其适用于gmm06eea01机器人六轴运动控制器中的相关语句。
[0037]
本发明的有益效果为:
[0038]
1、本发明利用大数据聚类对海量数据的均匀遍历特性对初始值及噪声进行调试,有效提高数据的聚类性能,并具备计算量小、实时性高的优势,提高了对工业机器人的控制能力,基于大数据聚类的工业机器人控制系统具有更加精准的控制能力,配合运行轨迹规划,使得本发明与传统系统相比,在工业机器人控制时运行轨迹偏差更小,更符合工业生产的需要,具有更高的经济价值。
[0039]
2、本发明采用示教再现的方式实现控制系统对机器人的运行控制,在过程中生成工业机器人生产作业文件,作业文件是以机器人控制编程语言和控制数据为核心的控制语句,涉及到直线、弧线以及轨迹规划,从而实现示教再现与轨迹规划的结合,将控制系统整合,提高系统性能。
[0040]
3、本发明选用两级计算结构的形式完成对机器人的控制,利用工业控制计算机作为系统的上位机结构,具备对海量数据的存储和快速运算能力,具有更加可靠、丰富的接口,当需要对下位机进行更换时,只需要将所需下位机按照适当的接口连接即可,且利用gmm06eea01机器人六轴运动控制器作为下位机,将工业控制计算机与伺服电机驱动器相连,支持多种高速总线,实现机器人的精准位姿控制以及机器人的示教和监控,综上,这种结构形式具有完成更加复杂、精细的工业任务的能力。
附图说明
[0041]
图1为本发明的机器人控制流程图。
具体实施方式
[0042]
为了加深对本发明的理解,下面将结合实施例对本发明做进一步详述,本实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
[0043]
实施例一
[0044]
根据图1所示,本实施例提出了基于大数据聚类的工业机器人控制方法,包括以下步骤:
[0045]
步骤一:控制连接
[0046]
利用工业控制计算机作为系统的上位机结构,选择gmm06eea01机器人六轴运动控
制器将工业控制计算机与伺服电机、驱动器相连,利用伺服电机配合传动结构控制机器人本体,gmm06eea01机器人六轴运动控制器通过以太网和工业控制计算机连接,gmm06eea01机器人六轴运动控制器通过ethercat与伺服高速通信,实现机器人的精准位姿控制,gmm06eea01机器人六轴运动控制器通过ethernet总线与工业pc、示教器、hmi工业现场设备通讯,实现机器人的示教和监控;选用两级计算结构的形式完成对机器人的控制,利用工业控制计算机作为系统的上位机结构,具备对海量数据的存储和快速运算能力,具有更加可靠、丰富的接口,当需要对下位机进行更换时,只需要将所需下位机按照适当的接口连接即可,且利用gmm06eea01机器人六轴运动控制器作为下位机,将工业控制计算机与伺服电机驱动器相连,支持多种高速总线,实现机器人的精准位姿控制以及机器人的示教和监控;
[0047]
步骤二:建立数据集
[0048]
基于大数据聚类的线性调频控制信号拟合,先建立控制系统中大数据分布式结构模型,根据模糊控制的概念,对控制系统中的大数据模糊控制进行研究,建立控制系统中海量控制数据的有限数据集:其中,y表示有限数据集合;n表示控制系统中的大数据分布式结构模型中包含的样本个数;r表示任意范数下的大数据聚类矢量空间,当有限数据集合y的聚类信道拟合因子为0时,此时满足公式(1):
[0049][0050]
式中,ρ表示聚类信道拟合因子;h表示大数据聚类的迭代次数;sgn表示符号函数;
[0051]
步骤三:信号拟合
[0052]
利用模糊控制和控制系统的拟合思想,将控制系统中的大数据信息流的线性调频信号拟合处理,结合大数据聚类算法,对控制系统的大数据信息特征点进行计算,计算的公式为:
[0053]
x(a,b)=∑[(ai,bi)-(ai+δa,bi+δb)]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0054]
式中,x(a,b)表示特征点函数;δa和δb表示控制系统大数据信息流的二维特征位移;(ai,bi)表示线性调频特征,根据公式(2),完成对控制系统中线性调频控制信号的拟合;利用大数据聚类对海量数据的均匀遍历特性对初始值及噪声进行调试,有效提高数据的聚类性能,并具备计算量小、实时性高的优势,提高了对工业机器人的控制能力;
[0055]
步骤四:运行轨迹规划
[0056]
在工业控制计算机上进行整体的轨迹规划,在gmm06eea01机器人六轴运动控制器上运用轮廓方式协调并控制工业机器人各个轴点的运动,完成工业机器人运行轨迹规划;基于大数据聚类的工业机器人控制系统具有更加精准的控制能力,配合运行轨迹规划,使得本发明与传统系统相比,在工业机器人控制时运行轨迹偏差更小;
[0057]
步骤五:控制系统整合
[0058]
利用示教方式完成工业机器人生产作业的整个过程,并在过程中生成工业机器人生产作业文件,作业文件是以机器人控制编程语言和控制数据为核心的控制语句,在每条控制语句中都包含各项作业指令的信号集和相应的参数信息,其中,选用的工业机器人编程语言包括三种:决策类、协调类和执行类,在作业指令的信号集中,包含对工业机器人的运动指令信号、输入和输出指令信号、计算指令信号和控制指令信号,运动指令信号包括前
进、后退、旋转、平移;计算指令信号包括加法、减法、乘法、除法;控制指令信号包括等待、呼叫、跳转,其中,运动指令信号的完成涉及到直线、弧线以及轨迹规划,从而实现示教再现与轨迹规划的结合,将控制系统整合,提高系统性能;采用示教再现的方式实现控制系统对机器人的运行控制,在过程中生成工业机器人生产作业文件,作业文件是以机器人控制编程语言和控制数据为核心的控制语句,涉及到直线、弧线以及轨迹规划,从而实现示教再现与轨迹规划的结合,将控制系统整合,提高系统性能;
[0059]
步骤六:示教界面设计
[0060]
示教界面选择由qt company开发的跨平台c图形用户界面应用程序开发框架,在界面上增加工业机器人轴操作按钮、速度控制按钮和示教坐标空间选择按钮,并在其中加入工业机器人作业指令信号集,示教界面中,当用户选择指令信号集中时,相关界面窗口自动隐藏或显示;
[0061]
步骤七:再现模块设计
[0062]
再现模块选用另一个qt company开发的跨平台c++应用程序开发框架,并在对话框当中调入通过示教过程已经生成的示教作业文件,将其译码,从而使其适用于gmm06eea01机器人六轴运动控制器中的相关语句,当设置好全部的运行次数参数后,开始工业机器人运行,并再现机器人的作业任务。
[0063]
实施例二
[0064]
本实施例提出了基于大数据聚类的工业机器人控制方法,在工业控制计算机上进行整体的轨迹规划,在gmm06eea01机器人六轴运动控制器上运用轮廓方式协调并控制工业机器人各个轴点的运动,具体的规划流程为:
[0065]
s1:利用插补轨迹算法构建轨迹数学方程,通过计算得出下一个插补点的具体位置坐标;
[0066]
s2:利用运动学逆向求解,得出插补点坐标上各个关节的转动角度,并得到工业机器人关节插补点的位置以及与上一插补点之间存在的角度偏差;
[0067]
s3:计算工业机器人各个关节的增量值,并将增量值写入dms格式的文件当中;
[0068]
s4:判断插补是否结束,当未完成相应的插补操作,则重新返回到步骤,当完成插补操作,则将dms格式文件载入到gmm06eea01机器人六轴运动控制器中,并执行dms格式文件中相应的指令控制信号,完成工业机器人运行轨迹规划;基于大数据聚类的工业机器人控制系统具有更加精准的控制能力,配合运行轨迹规划,使得本发明与传统系统相比,在工业机器人控制时运行轨迹偏差更小。
[0069]
本发明利用大数据聚类对海量数据的均匀遍历特性对初始值及噪声进行调试,有效提高数据的聚类性能,并具备计算量小、实时性高的优势,提高了对工业机器人的控制能力,基于大数据聚类的工业机器人控制系统具有更加精准的控制能力,配合运行轨迹规划,使得本发明与传统系统相比,在工业机器人控制时运行轨迹偏差更小,更符合工业生产的需要,具有更高的经济价值。且本发明采用示教再现的方式实现控制系统对机器人的运行控制,在过程中生成工业机器人生产作业文件,作业文件是以机器人控制编程语言和控制数据为核心的控制语句,涉及到直线、弧线以及轨迹规划,从而实现示教再现与轨迹规划的结合,将控制系统整合,提高系统性能。同时,本发明选用两级计算结构的形式完成对机器人的控制,利用工业控制计算机作为系统的上位机结构,具备对海量数据的存储和快速运
算能力,具有更加可靠、丰富的接口,当需要对下位机进行更换时,只需要将所需下位机按照适当的接口连接即可,且利用gmm06eea01机器人六轴运动控制器作为下位机,将工业控制计算机与伺服电机驱动器相连,支持多种高速总线,实现机器人的精准位姿控制以及机器人的示教和监控,综上,这种结构形式具有完成更加复杂、精细的工业任务的能力。
[0070]
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1