外骨骼机器人
1.本技术一般涉及助力机器人技术领域。更具体地,本技术涉及一种外骨骼机器人。
背景技术:
2.近年来,外骨骼机器人引起了众多研究者的关注。它在康复、援助等领域发挥着重要作用。特别是步行助力是外骨骼机器人的一个重要研究分支,外骨骼机器人可以帮助人们在负重行走时减少能量消耗,从而保护他们的健康和长距离行走。在过去的几十年中,人们提出了各种助力行走的外骨骼机器人,主要分为两类:刚性和柔性。
3.刚性外骨骼主要依靠将重量转移到地面来实现助力的效果,可以承载较重的重量。此外,由于结构设计,至少需要使用一个电机来控制一个关节。加州伯克利大学的研究小组在2004和2007中分别提出了berkeley lower extremity exoskeleton(bleex)[1]和human universal load carrier(hulc)[2]。这两个外骨骼机器人由液压和电动组合驱动,它们使用四个驱动器助力脚踝和臀部。上述外骨骼机器人都是有动力的,也有一些无动力的外骨骼系统。例如,collins等人设计了一种被动踝关节外骨骼,主要由框架、弹簧和被动离合器组成。当佩戴者行走时,与小腿腓肠肌平行的弹簧装置用于储存和释放能量。
[0004]
柔性外骨骼主要通过缆线或气动肌肉等柔性材料传递力。这种外骨骼通常不能直接承载重量,它依靠佩戴者自身的骨骼来支撑重量。在行走过程中,拉动下肢关节,达到助力的目的。意大利理工学院(iit)设计了基于气动的外骨骼,这大大减轻了系统的重量,但很难精确控制。自2011年以来,哈佛大学开发了softexo系列柔性外骨骼机器人,主要使用弹性针织物作为绑缚和鲍登线来传递力。他们通过惯性测量单元(imu)和压力传感器识别佩戴者的运动意图,通过扭矩控制拉动佩戴者的不同关节,包括脚踝、膝盖和臀部。ortiz等人提出的xosoft通过弹性带和离合器实现动力辅助,可为髋关节和膝关节的屈曲提供辅助。此外,一种新型电容式压力传感器用于检测佩戴者的意图和外骨骼的状态。使用两个电机辅助臀部,他们提出了人在回路的控制方法,该方法将人的状态作为反馈添加到控制算法中。然而,上述外骨骼均遵循刚性外骨骼的设计模型,均需使用一个电机来控制一个关节。
[0005]
由于机械结构的限制,刚性外骨骼机器人在一定时间内不可避免地会对人体行为产生一定的干扰,并且主动刚性外骨骼驱动器和关节的数量必须相同。此外,刚性结构可能会给佩戴者的下肢增加较大的惯性和摩擦,这可能会增加行走过程中的能量消耗。而上述柔性外骨骼均遵循刚性外骨骼的设计模型,使用一个电机来控制一个关节,电机的使用效率低下。
技术实现要素:
[0006]
本技术提供一种外骨骼机器人,以解决现有外骨骼机器人中驱动电机使用效率低下的问题。
[0007]
为解决上述技术问题,本技术提出一种外骨骼机器人,其包括:助力组件,包括左
髋部助力组件、右髋部助力组件、左脚踝助力组件和右脚踝助力组件;动力组件,包括髋部盘式电机和脚踝盘式电机,所述髋部盘式电机连接于所述左髋部助力组件和所述右髋部助力组件,所述脚踝盘式电机连接于所述左脚踝助力组件和所述右脚踝助力组件;所述髋部盘式电机正转或反转以分别驱动所述左髋部助力组件和所述右髋部助力组件,所述脚踝盘式电机正转或反转以分别驱动所述左脚踝助力组件或右脚踝助力组件。
[0008]
在一个实施例中,所述左髋部助力组件和所述右髋部助力组件共用腰部绑缚件,所述左髋部助力组件还包括左大腿绑缚件,所述右髋部助力组件还包括右大腿绑缚件;所述髋部盘式电机分别连接所述左大腿绑缚件和所述右大腿绑缚件;所述左脚踝助力组件包括左小腿绑缚件和左脚踝绑缚件,所述右脚踝助力组件包括右小腿绑缚件和右脚踝绑缚件,所述脚踝盘式电机分别连接于所述左小腿绑缚件和右脚小腿缚件。
[0009]
在一个实施例中,所述髋部盘式电机通过鲍登线分别连接所述左大腿绑缚件和所述右大腿绑缚件,所述脚踝盘式电机通过鲍登线分别连接于所述左小腿绑缚件和右小腿绑缚件。
[0010]
在一个实施例中,所述外骨骼机器人还包括:传感器组件,用于感测摆动角度;包括设置于所述左大腿绑缚件的左髋部传感器、设置于所述右大腿绑缚件的右髋部传感器、设置于所述左脚踝绑缚件的左脚踝传感器、以及设置于所述右脚踝绑缚件的右脚踝传感器。
[0011]
在一个实施例中,所述外骨骼机器人还包括控制触发器,所述控制触发器用于接收所述传感器组件的数据,所述控制触发器在接收到的右脚踝摆动角度和左髋部摆动角度的乘积大于0,且右脚踝摆动速度大于0时,控制所述髋部盘式电机驱动所述左髋部助力组件,控制所述脚踝盘式电机驱动所述右脚踝助力组件;所述控制触发器在接收到的左脚踝摆动角度和右髋部摆动角度的乘积大于0,且左脚踝摆动速度小于0时,控制所述髋部盘式电机驱动所述右髋部助力组件,控制所述脚踝盘式电机驱动所述左脚踝助力组件。
[0012]
在一个实施例中,所述右脚踝摆动速度由所述右脚踝摆动角度计算获得,所述左脚踝摆动速度由所述左脚踝摆动角度计算获得。
[0013]
在一个实施例中,所述髋部盘式电机驱动所述左髋部助力组件和所述脚踝盘式电机驱动所述右脚踝助力组件同时进行,所述髋部盘式电机驱动所述右髋部助力组件和所述脚踝盘式电机驱动所述左脚踝助力组件同时进行。
[0014]
在一个实施例中,盘式电机依据控制曲线驱动助力组件,所述控制曲线包括等待阶段、开始阶段、持续阶段和恢复阶段;在所述等待阶段,所述盘式电机在初始位置;在所述开始阶段,所述盘式电机由初始位置增加到最大位置;在所述持续阶段,所述盘式电机保持在最大位置;在所述恢复阶段,所述盘式电机由最大位置恢复到初始位置。
[0015]
在一个实施例中,当前行走周期的控制曲线由前一行走周期的控制曲线及前一行走周期的控制误差所确定。
[0016]
在一个实施例中,所述外骨骼机器人还包括背包,所述动力组件放置于所述背包内。
[0017]
与现有技术不同,本技术外骨骼机器人包括左髋部助力组件、右髋部助力组件、左脚踝助力组件和右脚踝助力组件;动力组件,包括髋部盘式电机和脚踝盘式电机,髋部盘式电机连接于左髋部助力组件和右髋部助力组件,脚踝盘式电机连接于左脚踝助力组件和右
脚踝助力组件;髋部盘式电机正转或反转以分别驱动左髋部助力组件和右髋部助力组件,脚踝盘式电机正转或反转以分别驱动左脚踝助力组件或右脚踝助力组件。本技术利用两个盘式电机来分时驱动四个关节,一个盘式电机负责左右两个关节,分时驱动,提高了电机的工作效率。
附图说明
[0018]
通过参考附图阅读下文的详细描述,本公开示例性实施方式的上述以及其他目的、特征和优点将变得易于理解。在附图中,以示例性而非限制性的方式示出了本公开的若干实施方式,并且相同或对应的标号表示相同或对应的部分,其中:
[0019]
图1是行走过程中步态循环分析的示意图;
[0020]
图2是行走过程中发力点分析的示意图;
[0021]
图3是行走过程中助力区间分析的示意图;
[0022]
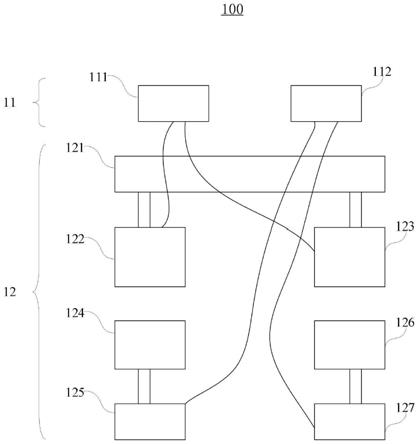
图4是本技术外骨骼机器人一实施例的结构示意图;
[0023]
图5是图4所示外骨骼机器人实施例被佩戴后的示意图;
[0024]
图6是图4所示外骨骼机器人实施例的控制曲线的示意图。
具体实施方式
[0025]
下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
[0026]
本技术基于对行走过程的分析,设计了一个外骨骼机器人,实现双驱动四关节分时控制,简化外骨骼机器人的结构,提高驱动效率。首先,本技术中对行走过程的分析如图1-3,图1是行走过程中步态循环分析的示意图,图2是行走过程中发力点分析的示意图,图3是行走过程中助力区间分析的示意图。
[0027]
人类的行走步态一般分为摆动相和支撑相,如图1和图2所示。例如,准备摆动左腿时,身体的肌肉发力点是左小腿和右髋。因此,本技术中可以选择踝部和髋部作为外骨骼的助力点。
[0028]
收集行走过程中的角度信息进行分析可得到图3,因为两条腿是对称的,所以收集的角度信息是相反的。图3中定义了四个角度,angle
la
和angle
ra
分别表示左踝角度和右踝角度。同样,angle
lh
和angle
rh
是左髋和右髋的角度。踝关节的角度基于横切面,髋关节的角度基于冠状面。当行走者处于直立位置时,这四个角度为零。由图3可得到右脚踝和左髋部的助力范围,左脚踝和右髋部的助力范围。两条腿在行走过程中交叉摆动,因此肌肉发力的时间有一个间隔。并且柔性外骨骼机器人不受刚性外骨骼结构的限制,本技术中用一个电机驱动左右关节是可行的。
[0029]
基于以上研究分析,本技术提出一种外骨骼机器人,具体可参阅图4和图5,图4是本技术外骨骼机器人一实施例的结构示意图,图5是图4所示外骨骼机器人实施例被佩戴后的示意图。本实施例外骨骼机器人100包括动力组件11、助力组件12。助力组件12绑缚在人体上,助力人体关节的运动;动力组件11连接助力组件12,为助力组件12提供驱动力。
[0030]
由于本技术主要用于行走,因而主要涉及髋部和脚踝的运动。助力组件12包括左髋部助力组件、右髋部助力组件、左脚踝助力组件和右脚踝助力组件。
[0031]
动力组件11则包括髋部盘式电机111和脚踝盘式电机112,髋部盘式电机111连接于左髋部助力组件和右髋部助力组件,正转反转以分别驱动左髋部助力组件和右髋部助力组件。脚踝盘式电机112则连接于左脚踝助力组件和右脚踝助力组件,正转反转以分别驱动左脚踝助力组件和右脚踝助力组件。
[0032]
动力组件11具体为盘式电机,盘式电机的转子为带永磁体的盘式结构,其盘式线圈结构大大降低了电机的体积和重量,逆变装置使其比普通电机具有更高的效率和更大的功率,能够满足本技术的技术要求。本技术中使用两个盘式电机作为动力组件,其中采用电机驱动钢丝绳并拉动相应接头的结构,从而拉动髋关节或踝关节。为了不干扰人的正常运动,电机结构设计部分采用空行程。正常情况下,其中钢丝绳处于松弛状态,不影响自由运动。
[0033]
动力组件11驱动助力组件12以驱动关节运动。动力组件11可通过鲍登线连接于助力组件,以传递动力。助力组件12主要为绑缚结构,绑缚在人体上,本技术中的绑缚结构具有三个优势,首先,尽可能避免受力点与人体之间的相对运动。其次,不会干扰佩戴者的正常运动。最后,具有高强度,避免在助力过程中变形,可长期使用。
[0034]
助力组件12的左髋部助力组件和右髋部助力组件共用腰部绑缚件121,左髋部助力组件还包括左大腿绑缚件122,右髋部助力组件还包括右大腿绑缚件123,左脚踝助力组件包括左小腿绑缚件124和左脚踝绑缚件125,右脚踝助力组件包括右小腿绑缚件126和右脚踝绑缚件127。
[0035]
腰部绑缚件121是整个助力组件12中最重要的支撑结构,可以将外骨骼固定在佩戴者身上。此外,腰部绑缚件121作为外骨骼机器人的佩戴主要受力点,采用三维剪裁,使腰部绑缚件121尽可能的贴近佩戴者的身体,分散压力。
[0036]
左大腿绑缚件122和右大腿绑缚件123,大腿绑缚件上为髋关节运动的助力点,在行走过程中外骨骼机器人通过大腿绑缚件对佩戴者的髋关节进行助力。
[0037]
左小腿绑缚件124和右小腿绑缚件126,小腿绑缚件为踝关节运动的助力点,且同时避免脚踝绑缚件的横向移动。
[0038]
左脚踝绑缚件125和右脚踝绑缚件127,脚踝绑缚件包括脚背部和脚底部,二者通过尼龙扣连接,以适配不同尺寸的脚。
[0039]
髋部盘式电机111具体通过鲍登线128连接于左大腿绑缚件122和右大腿绑缚件123,脚踝盘式电机112具体通过鲍登线128连接于左小腿绑缚件124和右小腿绑缚件126。鲍登线主要用于传递力,在鲍登线上还缠绕有保护套,例如橡胶套,以减小鲍登线与佩戴者的接触。
[0040]
外骨骼机器人100是佩戴在人体身上的,其中助力组件12绑缚在人体身上,动力组件11则装在背包中,由佩戴者直接背在身上,即外骨骼机器人100还包括背包14。显然本技术中只使用了两个电机,大大减小了整个外骨骼机器人100的重量,也更利于人体使用。背包14中还可放置电池,以为动力组件11供电。
[0041]
外骨骼机器人100还包括传感器组件13,用于感测关节的摆动角度,从而实现助力控制。传感器组件13包括设置在左大腿绑缚件122的左髋部传感器、设置于右大腿绑缚件
123的右髋部传感器、设置于左脚踝绑缚件125的左脚踝传感器、以及设置于右脚踝绑缚件127的右脚踝传感器。传感器可以是imu,用于测量髋部和脚踝的摆动角度。利用传感器的检测来触发关节助力,以及控制关节的驱动。外骨骼机器人还包括控制触发器,可以是处理器芯片。其用于接收传感器组件13的数据。
[0042]
本实施例触发助力过程具体为:控制触发器在接收到的右脚踝摆动角度和左髋部摆动角度的乘积大于0,且右脚踝摆动速度大于0时,控制髋部盘式电机111驱动左髋部助力组件,控制脚踝盘式电机112驱动右脚踝助力组件。还在接收到的左脚踝摆动角度和右髋部摆动角度的乘积大于0,且左脚踝摆动速度小于0时,控制髋部盘式电机111驱动右髋部助力组件,控制脚踝盘式电机112驱动左脚踝助力组件。
[0043]
在控制触发器接收传感器组件13的数据时,传感器组件13的数据可能存在噪声,因此在本实施例中还会对传感器组件13的数据进行滤波,使得数据更加平滑和稳定。
[0044]
首先,在数据中添加一个滑动窗口过滤器:
[0045][0046]
其中,anglei是第i个数据。在本实施例中,将滑动窗口滤波器的参数设置为5,具体可以根据不同的系统和数据采样频率进行调整。然后,再计算这些数据的标准偏差si:
[0047][0048]
在此基础上,再增加了二倍均方差滤波器,可以消除一些数据突变点:
[0049][0050]
经过上述数据处理,消除数据中的突变点,保证数据的平滑和稳定。
[0051]
在触发助力的具体过程中,右脚踝摆动速度由右脚踝摆动角度计算获得,左脚踝摆动速度由左脚踝摆动角度计算获得。
[0052]
在计算时,将imu值的速度定义为v
imu
:
[0053][0054]
基于此,可计算出左踝、右踝、左髋和右髋imu值的速度,对应为v
la
,v
ra
,v
lh
,v
rh
。
[0055]
继而,可计算a
t
[0056][0057]
其中a
t
表示助力状态,如果a
t
=1,则右脚踝和左髋开始助力;如果a
t
=-1,左踝和右髋开始起助力作用。如果a
t
是1或-1,我们将时间点设置为t
start
,这意味着外骨骼开始提供助力。
[0058]
在触发关机助力后,可控制盘式电机驱动助力组件,具体是依据控制曲线来进行驱动。如图6,图6是图4所示外骨骼机器人实施例的控制曲线的示意图。
[0059]
控制曲线基于行走的过程,包括等待阶段pwait、开始阶段prise、持续阶段pstay和恢复阶段pback;在等待阶段,盘式电机在初始位置;在开始阶段,盘式电机由初始位置增加到最大位置;在持续阶段,盘式电机保持在最大位置;在恢复阶段,盘式电机由最大位置恢复到初始位置。
[0060]
对于控制曲线的四个阶段p
wait
,p
rise
,p
stay
和p
back
,设置四个时间点来进行区分t
wait
,t
start
,t
stay
和t
back
。
[0061]
1)p
wait
(t)。从t
wait
到t
start
,其中t
start
是外骨骼机器人开始助力的时间点,t
wait
是上一个控制周期结束的时间点。在这段时间内,鲍登线松动,电机位置保持在零,即初始位置,因此p
wait
(t)=0;
[0062]
2)p
rise
(t)。从t
start
到t
stay
,以及:
[0063]
t
stay
=t
start
+t
rise
ꢀꢀꢀ
(6)
[0064]
其中,t
rise
由上一个控制循环计算。这段时间是外骨骼的有效协助期:
[0065]
p
rise
(t)=p
max
/t
riset
ꢀꢀꢀ
(7)
[0066]
其中,p
max
是此控制周期中电机的最大位置。
[0067]
3)p
stay
(t)。从t
stay
到t
back
,以及:
[0068]
t
back
=t
stay
+t
buf fer
ꢀꢀꢀ
(8)
[0069]
其中t
buf fer
是一个定义的参数,它表示外骨骼在此控制周期中保持在最大位置的持续时间。在此期间,鲍登线拉紧,电机保持在当前位置,因此p
stay
(t)=p
max
;
[0070]
4)p
back
(t)。从t
back
到t
wait
,在此期间,鲍登线是松的,电机返回零点:
[0071]
p
back
(t)=p
max-k
max
t
ꢀꢀꢀ
(9)
[0072]
其中,k
max
是电机速度的最大值。至此,整个助力周期结束。
[0073]
所以整个位置控制曲线是p(t):
[0074][0075]
在这条曲线中,我们需要控制的是p
max
和t
rise
。
[0076]
我们定义一个参数c
system
来反映外骨骼的系统特征,它表示鲍登线拉伸长度p
motor
(mm)和由imu测量的关节角度angle
imu
(
°
)之间的关系。我们假设这是一个线性关系:
[0077]
p
motor
=c
system
angle
imu
ꢀꢀꢀ
(11)
[0078]
因此,我们可以通过第m个控制周期计算下一个$p{max,m+1}$:
[0079]
p
max,m+1
=c
system
angle
max,m
ꢀꢀꢀ
(12)
[0080]
其中,m表示第m个控制循环,angle
max,m
是第m个控制周期中imu的最大值,可通过峰值检测找到。此外,我们记录达到峰值的时间点,并将其设置为t
imumax,m
,因此我们可以得到下一个t
rise,m+1
,如下所示:
[0081]
t
rise,m+1
=t
imumax,m-t
start,m
ꢀꢀꢀ
(13)
[0082]
因为不同的人有不同的步态,行走是一个周期重复的过程,我们使用迭代学习控
制(ilc)来计算p
max
和t
rise
:
[0083]
um=[p
max,m t
rise,m
]
t
ꢀꢀꢀ
(14)
[0084]um+1
=um+β
·em
ꢀꢀꢀ
(15)
[0085]
其中,em是第m个控制周期中的误差,β是迭代参数,在本文中是一个常数,它决定了系统的收敛速度。
[0086]
即当前行走周期的控制曲线由前一行走周期的控制曲线及前一行走周期的控制误差所确定。在本实施例中描述了外骨骼的控制曲线,并使用ilc拟合不同的速度和步态,如图6所示。
[0087]
本实施例一个电机控制两个关节,提高了电机的使用效率,并且使用迭代学习优化控制曲线,适应了不同的行走步态和速度。
[0088]
对于本实施例还进行了代谢率的试验,通过代谢率来评估其效率。具体由5名实验者,在室内跑步机上以5km/h的平均速度和25kg的负荷进行实验。
[0089]
为了测量代谢,使用气体分析仪测量呼出的气体的浓度和体积,该气体是主要由二氧化碳和氧气组成的肺部气体。代谢率也可以用修正的brockway方程计算。详情如下:
[0090][0091]
其中,c1为16.89kj/l,c2为4.84kj/l,而δh为能量率(kj/s)。δh越小,代谢消耗越小。
[0092]
对于每个参与者,进行两组实验来测量代谢,有外骨骼和没有外骨骼。每组实验都要求佩戴者在负重25kg后坐10分钟,然后在跑步机上以5km/h的平均速度行走10分钟。将跑步机保持在4.5km/h状态30秒,然后切换到5km/h状态30秒,然后切换到5.5km/h状态30秒,最后切换回5km/h状态30秒,以上为一个循环。两组实验之间休息半个小时。为了确保数据的准确性,取每10分钟的最后8分钟为有效数据来进行分析。在下一步处理中,将这八分钟内氧气和二氧化碳的流量值(ml/min)的平均值分别计算为和
[0093]
使用方程式(16),可以计算休息时的功率(p
resting
)和行走时的功率(p
walking
),并且可以从这两个值中获得净代谢功率(p
net
)。然后,净代谢率(nmr)可通过净功率和体重(m)计算,如下所示:
[0094]
nmr=(p
walking-p
resting
)/m
ꢀꢀꢀ
(17)
[0095]
在最终的实验结果中,可知五名穿戴外骨骼的人平均可以减少7.79%的新陈代谢。由此可见本实施例外骨骼机器人具有很好的助力效果。
[0096]
虽然本说明书已经示出和描述了本技术的多个实施例,但对于本领域技术人员显而易见的是,这样的实施例只是以示例的方式提供的。本领域技术人员会在不偏离本技术思想和精神的情况下想到许多更改、改变和替代的方式。应当理解的是在实践本技术的过程中,可以采用对本文所描述的本技术实施例的各种替代方案。所附权利要求书旨在限定本技术的保护范围,并因此覆盖这些权利要求范围内的模块组成、等同或替代方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1