一种轮式巡检机器人及其巡检管控平台的制作方法
1.本发明涉及巡检机器人设计领域,具体涉及一种轮式巡检机器人及其巡检管控平台。
背景技术:
2.在一些高辐射、高温、高腐蚀性等危险系数较高的厂区环境下(例如发电厂、冶金厂、化工厂等),一般采用传统的人工方式进行日常安全巡检。该传统的人工巡检方式不仅人工成本较高且存在较大的人身安全风险,人工巡检过程中容易出现因工作人员的误判和漏判而导致重大事故风险,且巡检数据的追溯性也很差。
3.随着科技的发展,人们对于新事物有着迫切的需求,智能巡检机器人是近几年兴起的一种巡检设备,其适用范围广。因为使用巡检机器人进行工作,能很大程度地改善人工巡检的不足之处。然而,实际应用中,由于环境复杂,巡检道路众多,各种待巡检的仪器设备分布高低不均,使用市面上现有智能巡检机器人难以较好完成该环境下的巡检任务。
技术实现要素:
4.基于此,本发明提供了一种轮式巡检机器人及其巡检管控平台,以解决现有技术的智能巡检机器人分布高低不均,工作效率较低的技术问题。
5.为实现上述目的,本发明提供了一种轮式巡检机器人,包括智能底盘系统、电控箱、导航系统、视觉检测系统和环境参数监测系统,其中:
6.所述智能底盘系统包括框架式底盘主体、驱动轮、万向轮、行驶电机、蓄电池和车载无线终端,两个所述驱动轮和两个所述万向轮前后分设在所述框架式底盘主体的底部,所述驱动轮连接有受控于所述电控箱的行驶电机,所述车载无线终端搭载于所述框架式底盘主体上并与所述电控箱连接,所述电控箱设置在框架式底盘主体内部;
7.所述导航系统包括与所述电控箱连接的光学读码器和激光雷达,所述光学读码器安装在所述框架式底盘主体的底部以用于对读取地面上预设的二维码,所述激光雷达安装在所述框架式底盘主体的顶部;
8.所述视觉检测系统包括与所述电控箱连接的顶部的高清摄像头、红外热像仪和超声波模块,所述高清摄像头、红外热像仪和超声波模块集成设置并安装在所述框架式底盘主体的顶部;
9.所述环境参数监测系统包括与所述电控箱连接的气体探测器与温湿度传感器。
10.作为本发明的进一步优选技术方案,所述框架式底盘主体的顶部设有云台,所述视觉检测系统通过云台设置在所述框架式底盘主体的顶部。
11.作为本发明的进一步优选技术方案,所述云台的下方连接有升降杆,所述云台通过所述升降杆竖立设置在所述框架式底盘主体的顶部,所述升降杆具有由所述电控箱控制实现升降的顶升推杆。
12.作为本发明的进一步优选技术方案,所述巡检机器人还包括与所述电控箱连接的
语音系统,所述语音系统包括语音对讲模块和拾音器。
13.作为本发明的进一步优选技术方案,所述智能底盘系统还包括无线充电模块,所述无线充电模块与所述蓄电池连接。
14.作为本发明的进一步优选技术方案,所述框架式底盘主体的前后端分别设置有感应式的防撞条,所述防撞条与所述电控箱连接。
15.作为本发明的进一步优选技术方案,所述框架式底盘主体上设有急停开关、告警灯、指示灯带和蜂鸣器,所述急停开关、告警灯、指示灯带和蜂鸣器均受控于所述电控箱。
16.作为本发明的进一步优选技术方案,所述电控箱包括嵌入式控制板、工控机和交换机,所述嵌入式控制板的串口与所述工控机的rs232通讯口连接,所述嵌入式控制板的网口与所述交换机的网口连接,所述工控机的网口与所述交换机的网口连接;
17.所述云台、激光雷达、语音对讲模块,以及用于连接车载无线终端的网络安全模块分别连接在所述交换机的不同网口上;所述拾音器与所述工控机的音频口连接;所述防撞条、急停开关、告警灯、指示灯带、蜂鸣器和无线充电模块均与所述嵌入式控制板的gpio口连接,所述超声波模块、气体探测器、温湿度传感器、光学读码器均与所述嵌入式控制板的rs485通讯口连接,所述嵌入式控制板的can通讯口连接有伺服驱动器和驱动器,所述伺服驱动器与所述行驶电机连接,所述驱动器与所述顶升推杆连接。
18.根据本发明的另一方面,本发明还提供了一种巡检管控平台,用于与上述任一项所述的轮式巡检机器人通讯连接,以对轮式巡检机器人进行远程操控。
19.本发明的轮式巡检机器人及其巡检管控平台,该巡检机器人将智能底盘系统、电控箱、导航系统、视觉检测系统和环境参数监测系统相结合,集自动行走、自动避障、自动扫描、自动上传数据、自动充电、自动报警等多功能为一体,可实现精确导航及现场数据采集,替代人工完成智能巡检工作,不仅从根源上杜绝了人身安全风险,而且可以实现高频巡检,效率得到大大提升。
附图说明
20.下面结合附图和具体实施方式对本发明作进一步详细的说明。
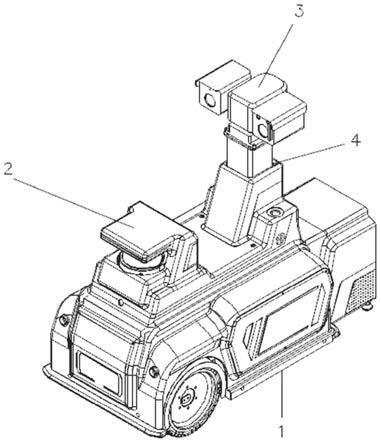
21.图1为本发明轮式巡检机器提供的一实例的结构示意图;
22.图2为本发明轮式巡检机器的内部结构示意图;
23.图3为本发明轮式巡检机器的底部结构示意图;
24.图4为本发明电控箱的电气连接图。
25.图中:1、智能底盘系统,2、激光雷达,3、视觉检测系统,4、升降杆,5、框架式底盘主体,6、驱动轮,7、万向轮,8、防撞条,9、光学读码器,10、,电控箱,11、环境参数监测系统。
26.本发明目的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
27.下面将结合附图以及具体实施方式,对本发明做进一步描述。较佳实施例中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等用语,仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
28.如图1至3所示,轮式巡检机器包括智能底盘系统1、电控箱10、导航系统、视觉检测系统3、环境参数监测系统11和语音系统,其中:
29.所述智能底盘系统1包括框架式底盘主体5、驱动轮6、万向轮7、行驶电机、蓄电池、车载无线终端和无线充电模块,两个所述驱动轮6和两个所述万向轮7前后分设在所述框架式底盘主体5的底部,所述驱动轮6连接有受控于所述电控箱10的行驶电机,所述车载无线终端搭载于所述框架式底盘主体5上并与所述电控箱10连接,所述无线充电模块与所述蓄电池连接以提供无线充电功能,所述框架式底盘主体5的前后端分别设置有感应式的防撞条,所述防撞条与所述电控箱10连接,所述电控箱10设置在框架式底盘主体5内部;
30.所述导航系统包括与所述电控箱10连接的光学读码器9和激光雷达2,所述光学读码器9安装在所述框架式底盘主体5的底部以用于对读取地面上预设的二维码,所述激光雷达2安装在所述框架式底盘主体5的顶部;
31.所述视觉检测系统3包括与所述电控箱10连接的顶部的高清摄像头、红外热像仪和超声波模块,所述高清摄像头、红外热像仪和超声波模块采用集成设置,所述框架式底盘主体5的顶部设有云台,所述视觉检测系统3通过云台设置在所述框架式底盘主体5的顶部,云台的下方连接有升降杆4,所述云台通过所述升降杆4竖立设置在所述框架式底盘主体5的顶部,所述升降杆4具有由所述电控箱10控制实现升降的顶升推杆。
32.所述环境参数监测系统11包括与所述电控箱10连接的气体探测器与温湿度传感器,气体探测器与温湿度传感器根据需要可灵活设置在所述框架式底盘主体5上;
33.所述语音系统包括与所述电控箱10连接的语音对讲模块和拾音器,语音对讲模块和拾音器根据需要可灵活设置在所述框架式底盘主体5上。
34.具体实施中,可根据需要,在所述框架式底盘主体5上设有急停开关、告警灯、指示灯带和蜂鸣器,所述急停开关、告警灯、指示灯带和蜂鸣器均受控于所述电控箱10。
35.在一实施例中,参阅图4所示,所述电控箱10包括嵌入式控制板、工控机和交换机,所述嵌入式控制板的串口与所述工控机的rs232通讯口连接,所述嵌入式控制板的网口与所述交换机的网口连接,所述工控机的网口与所述交换机的网口连接;
36.所述云台、激光雷达2、语音对讲模块,以及用于连接车载无线终端的网络安全模块分别连接在所述交换机的不同网口上;所述拾音器与所述工控机的音频口连接;所述防撞条、急停开关、告警灯、指示灯带、蜂鸣器和无线充电模块均与所述嵌入式控制板的gpio口连接,所述超声波模块、气体探测器、温湿度传感器、光学读码器9均与所述嵌入式控制板的rs485通讯口连接,所述嵌入式控制板的can通讯口连接有伺服驱动器和驱动器,所述伺服驱动器与所述行驶电机连接,所述驱动器与所述顶升推杆连接。
37.具体实施中,智能底盘系统1采用框架式结构设计的框架式底盘主体5,搭载了伺服驱动的行驶电机,行驶电机配合有精密行星减速器以对驱动轮6提供动力,架式底盘主体内部预留安装空间以用于安装电控箱10及蓄电池。
38.该轮式巡检机器人在室内环境下主要依靠光学读码器9读取地面的二维码实现自主导航,在室外环境下主要依靠激光雷达2实现建图自主导航。巡检机器人采用激光雷达2+二维码融合的导航方式,机器人执行任务时可以自建实时地图,并实现高精度导航与避障,且具备按照预先设定任务或路线自动行走和停止功能、动态巡检任务、路径规划等功能。
39.本实施例的轮式巡检机器人支持自动巡检功能,按照预设规划路径自动巡视方
式,自动巡检的模式主要有:例行巡检、特殊巡检等,各种模式支持互相切换。机器人搭载高清摄像机、红外热成像仪、拾音器等多种检测设备,按照既定的规则完成区内各处的设备和仪表进行可见光拍照、表计读数、红外测温及环境监测等巡检活动将巡检数据自动传输到巡检管控平台保存,并生成检测分析报告。搭载拾音器,可以对待监测设备如变压器、锅炉、水泵等设备进行声音采集,通过智能识别与分析完成声音异常识别,并通过巡检管控平台进行报警。搭载气体探测器与温湿度传感器,可以随时对空气环境与温湿度进行分析并得出结果,气体分析包括检测空气有毒与可燃气体浓度大小,以便将结果反馈给巡检管控平台,也可人工设置报警的限值,包括湿度报警限值,气体浓度报警限值,超过限值后超过上限值后,立即报警。
40.本实施例的轮式巡检机器人支持人工遥控巡检的方式对机器人进行实时遥控。该项应用模式适用于运维人员以及管理单位需要对某类设备的状态进行锁定与监测,尤其对于在机器人自主巡检过程中如检测到设备、环境状态异常并向运维人员告警时,运维人员可以在第一时间使用巡检管控平台的人工遥控界面或是遥控手柄,操控机器人快速到达异常设备位置,及时对异常设备进行查看并核实报警信息,以便迅速制定响应策略。
41.本实施例的轮式巡检机器人由防撞条8、激光雷达2、超声波雷达组成的三重避障,遇到障碍物或人员时会自动停止,人员或障碍物移走后,巡检机器人自动继续完成巡检任务。
42.优选地,所述视觉检测系统3可设置在可升降、可旋转的的云台上,集成了高清摄像头、红外热像仪和超声波雷达,可完成全方位全角度的数据采集,从而实现了环境监测、人员监测、局部温度监测等功能。
43.本发明的轮式巡检机器,可替代人工完成智能巡检工作,不仅从根源上杜绝了人身安全风险,而且可以实现高频巡检,效率也得到了大大提升。另外,本发明的轮式智能巡检采用智能识别结合深度学习的检测方式,稳定可靠且能够实现大数据的收集、管理、分析,即实现了智能风险预警。
44.本发明还提供了一种巡检管控平台,用于与上述任一实施例所述的轮式巡检机器人通讯连接,以对轮式巡检机器人进行远程操控。
45.虽然以上描述了本发明的具体实施方式,但是本领域熟练技术人员应当理解,这些仅是举例说明,可以对本实施方式做出多种变更或修改,而不背离本发明的原理和实质,本发明的保护范围仅由所附权利要求书限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1