一种用于智能制造自动化生产线的多功能工业机器人的制作方法
1.本发明涉及机器人制造技术领域,更具体地说,本发明涉及一种用于智能制造自动化生产线的多功能工业机器人。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人被广泛应用于电子、物流、化工等各个工业领域之中;现有工业机器人在制造自动化生产线上使用的过程中,需要对加工件进行夹取操作,提高工业生产制造的效率,进而无法更好的满足人们的使用需求。
3.但是,现有的对机器人夹取物品进行取放时,容易出现晃动,没有保护装置,导致物品容易产生碰撞以及移动过程中对下方存在安全隐患,并且定位放置不精确,需要多次调整浪费时间,降低工作效率,因此,需要一种能够自主抓取,且抓取牢靠,并能够进行精准定位,对物品以及场内人员进行保护的一种用于智能制造自动化生产线的多功能工业机器人。
技术实现要素:
4.为了克服现有技术的上述缺陷,本发明的实施例提供一种用于智能制造自动化生产线的多功能工业机器人,通过移动机构、抓取机构以及保护机构的设置,方便机器人精确定位,移动轻便,抓取牢靠,同时对所抓取的加工件进行保护,以解决上述背景技术中提出的问题。
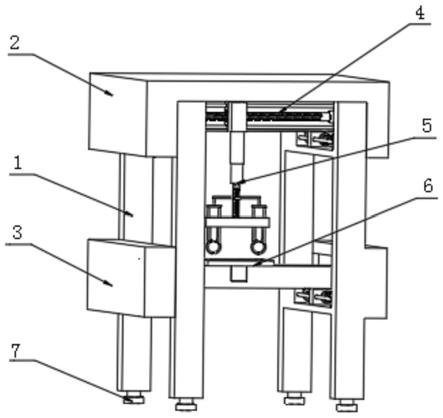
5.为实现上述目的,本发明提供如下技术方案:一种用于智能制造自动化生产线的多功能工业机器人,包括支柱、上盖、防护壳、底脚以及伺服电机箱,所述支柱底端安装有所述底脚,所述防护壳安装在所述支柱中间一侧,所述上盖安装在所述支柱顶端,所述支柱中间一位置安装有所述伺服电机箱,所述支柱顶端固定支撑安装有移动机构,所述移动机构上固定安装有抓取机构,所述抓取机构底端的所述支柱之间固定安装有保护机构;
6.所述伺服电机箱控制所述移动机构x、y轴向移动与所述抓取机构上的伸缩杆进行z轴移动对加工件进行定位抓取后由保护机构对加工件进行保护。
7.在一个优选地实施方式中,所述移动机构包括第一固定罩、第一电机、第一转向器、第一丝杆、第一滑块、第一连接轴、第一导轨、第一轴承、第二电机、第二转向器、第二丝杆、第二滑块、第二连接轴、第二导轨、第二轴承以及第二固定罩,所述第一固定罩内安装有所述第一电机,所述第一电机连接有所述第一转向器,所述第一转向器另一端固定连接有所述第一丝杆,所述第一丝杆套接安装有所述第一滑块,所述第一滑块内部安装有所述第一连接轴,所述第一丝杆另一端安装有所述第一轴承,所述第一轴承固定安装在所述第一固定罩一端内侧,所述第一导轨固定安装在所述第一固定罩内部两端,所述第一滑块顶端固定安装有第二固定罩,所述第二固定罩内安装有所述第二电机,所述第二电机连接有所
述第二转向器,所述第二转向器另一端固定连接有所述第二丝杆,所述第二丝杆套接安装有所述第二滑块,所述第二滑块内部安装有所述第二连接轴,所述第二丝杆另一端安装有所述第二轴承,所述第二轴承固定安装在所述第二固定罩一端内侧,所述第二导轨固定安装在所述第二固定罩内部两端。
8.在一个优选地实施方式中,所述抓取机构包括连接块、伸缩杆、第三电机、第三转向器、第三丝杆、第三滑块、第三导轨、限位板、支架以及抓头,所述连接块底端固定安装有所述伸缩杆,所述伸缩杆底端固定安装有第三固定罩,所述第三固定罩内安装有所述第三电机,所述第三电机连接有所述第三转向器,所述第三转向器另一端固定连接有所述第三丝杆,所述第三丝杆套接安装有所述第三滑块,所述第三丝杆另一端安装有第三轴承,所述第三轴承固定安装在所述第三固定罩一端内侧,所述第三导轨固定安装在所述第三固定罩内部两端,所述第三滑块固定安装有支架,所述支架通过所述限位板与底端所述抓头固定连接,所述限位板固定安装在所述第三固定罩底端。
9.在一个优选地实施方式中,所述保护机构包括第四固定罩、第四电机、第四转向器、第四丝杆、托盘、第四轴承、第五固定罩、第五电机、第五转向器、第五丝杆、第五滑块、第五导轨以及第五轴承,所述第四固定罩内安装有所述第四电机,所述第四电机连接有所述第四转向器,所述第四转向器另一端固定连接有所述第四丝杆,所述第四丝杆套接安装有第四滑块,所述第四丝杆另一端安装有所述第四轴承,所述第四轴承固定安装在所述第四固定罩一端内侧,所述第四固定罩内部两端固定安装有第四导轨,所述第四固定罩底端固定安装有所述第五滑块,所述第五滑块套接安装在所述第五丝杆上,所述第五丝杆一端固定安装有所述第五轴承,所述第五轴承另一端连接有所述第五转向器,所述第五转向器另一端连接有所述第五电机,所述第五电机安装在所述第五固定罩内,所述第五固定罩内部两端安装有所述第五导轨。
10.在一个优选地实施方式中,所述底脚顶端焊接有螺纹丝杆,所述螺纹丝杆套接安装有螺母。
11.在一个优选地实施方式中,所述移动机构与所述保护机构两侧呈轴对称。
12.在一个优选地实施方式中,所述限位板底端两侧固定焊接有支杆,所述抓头活动安装在所述支杆上。
13.在一个优选地实施方式中,所述移动机构顶端安装有所述上盖,所述保护机构两侧设置安装有所述防护壳。
14.本发明的技术效果和优点:
15.1、通过移动机构的设置,与现有技术相比,机器人进行抓取移动时,通过第一固定罩内固定的第一电机转动,第一转向器进行转换使得第一丝杆转动,第一丝杆另一端的第一轴承进行固定且第一滑块由第一导轨限制,使得第一连接轴带动第一滑块在y轴上滑动,移动机构两侧呈轴对称,两端的第一滑块顶端固定安装的第二固定罩随着第一滑块的移动而移动,同步的第二电机转动由第二转向器的转动使得第二丝杆转动,第二丝杆另一端由第二轴承固定,第二丝杆上套接安装的第二连接轴带动第二滑块在x轴上滑动并由第二导轨固定,移动机构带动抓取机构能够在x、y轴上移动,同步移动高效快速,节约时间,降低劳动成本;
16.2、通过抓取机构的设置,与现有技术相比,通过连接块底端的伸缩杆进行伸缩,使
得抓取机构在z轴上进行移动,伸缩杆底端固定的第三固定罩也随着进行高度位置变化,第三固定罩底端固定安装的限位板进行上下位置变换,第三固定罩内固定安装的第三电机转动,经过第三转向器的转换使得第三丝杆由另一端第三轴承固定进行转动,套接安装在第三丝杆上并由第三导轨限定的第三滑块进行上下移动,第三滑块上下移动时使得支架进行上下位置变化,支架通过限位板底端焊接的支杆使得对支杆底端活动安装的抓头进行拉扯,使得抓头进行合闭与张开对加工件进行抓取与放置,抓取牢固,省时省力,提高工作效率与移动机构结合实现x、y、z三轴移动,精确高效;
17.3、通过保护机构的设置,与现有技术相比,通过第五固定罩内固定的第五电机转动,第五转向器进行转换使得第五丝杆转动,第五丝杆另一端的第五轴承进行固定且第五滑块由第五导轨限制,使得第五连接轴带动第五滑块在y轴上滑动,保护机构两侧呈轴对称,两端的第五滑块顶端固定安装的第四固定罩随着第五滑块的移动而移动,同步的第四电机转动由第四转向器的转动使得第四丝杆转动,第四丝杆另一端由第四轴承固定,第四丝杆上套接安装的第四连接轴带动第四滑块在x轴上滑动并由第四导轨固定,第四滑块上安装的托盘也随着移动,移动机构在控制抓取机构对加工件进行抓取抬高进行移动后,保护机构使得托盘移动至抓取机构的下方进行对加工件进行保护,防止加工件掉落,造成损坏以及对下面工作人员造成安全隐患,提高安全性能;
18.4、通过底脚上焊接的螺纹丝杆,与现有技术相比,底脚能够进行高度调整,使得整体能够进行水平调整,螺母对螺纹丝杆进行固定,防止因振动或者晃动导致螺纹丝杆松动,使得整体水平度不够,在抓取机构对加工件进行抓取时,角度不当产生碰撞,能够进行水平调整使得抓取更加精确,减少碰撞。
附图说明
19.图1为本发明的整体结构示意图。
20.图2为本发明的平面结构示意图。
21.图3为本发明的内部立体结构示意图。
22.图4为本发明的内部侧面结构示意图。
23.图5为本发明的移动机构的结构示意图。
24.图6为本发明的抓取机构的结构示意图。
25.图7为本发明的保护机构的结构示意图。
26.图8为本发明的底脚的结构示意图。
27.附图标记为:1、支柱;2、上盖;3、防护壳;4、移动机构;5、抓取机构;6、保护机构;7、底脚;8、伺服电机箱;401、第一固定罩;402、第一电机;403、第一转向器;404、第一丝杆;405、第一滑块;406、第一连接轴;407、第一导轨;408、第一轴承;409、第二电机;410、第二转向器;411、第二丝杆;412、第二滑块;413、第二连接轴;414、第二导轨;415、第二轴承;416、第二固定罩;501、连接块;502、伸缩杆;503、第三电机;504、第三转向器;505、第三丝杆;506、第三滑块;507、第三导轨;508、限位板;509、支架;510、抓头;601、第四固定罩;602、第四电机;603、第四转向器;604、第四丝杆;605、托盘;606、第四轴承;607、第五固定罩;608、第五电机;609、第五转向器;610、第五丝杆;611、第五滑块;612、第五导轨;613、第五轴承;701、螺母;702、螺纹丝杆。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.如附图1-8所示的一种用于智能制造自动化生产线的多功能工业机器人,包括支柱1、上盖2、防护壳3、底脚7以及伺服电机箱8,所述支柱1底端安装有所述底脚7,所述防护壳3安装在所述支柱1中间一侧,所述上盖2安装在所述支柱1顶端,所述支柱1中间一位置安装有所述伺服电机箱8,所述支柱1顶端固定支撑安装有移动机构4,所述移动机构4上固定安装有抓取机构5,所述抓取机构5底端的所述支柱1之间固定安装有保护机构6,所述伺服电机箱8控制所述移动机构4在x、y轴向移动与所述抓取机构5上的伸缩杆502进行z轴移动对加工件进行定位抓取后由保护机构6对加工件进行保护。
30.如附图5所示,所述移动机构4包括第一固定罩401、第一电机402、第一转向器403、第一丝杆404、第一滑块405、第一连接轴406、第一导轨407、第一轴承408、第二电机409、第二转向器410、第二丝杆411、第二滑块412、第二连接轴413、第二导轨414、第二轴承415以及第二固定罩416,所述第一固定罩401内安装有所述第一电机402,所述第一电机402连接有所述第一转向器403,所述第一转向器403另一端固定连接有所述第一丝杆404,所述第一丝杆404套接安装有所述第一滑块405,所述第一滑块405内部安装有所述第一连接轴406,所述第一丝杆404另一端安装有所述第一轴承408,所述第一轴承408固定安装在所述第一固定罩401一端内侧,所述第一导轨407固定安装在所述第一固定罩401内部两端,所述第一滑块405顶端固定安装有第二固定罩416,所述第二固定罩416内安装有所述第二电机409,所述第二电机409连接有所述第二转向器410,所述第二转向器410另一端固定连接有所述第二丝杆411,所述第二丝杆411套接安装有所述第二滑块412,所述第二滑块412内部安装有所述第二连接轴413,所述第二丝杆411另一端安装有所述第二轴承415,所述第二轴承415固定安装在所述第二固定罩416一端内侧,所述第二导轨414固定安装在所述第二固定罩416内部两端,机器人进行抓取移动时,第一固定罩401内固定的第一电机402转动,第一转向器403进行转换使得第一丝杆404转动,第一丝杆404另一端的第一轴承408进行固定且第一滑块405由第一导轨407限制,使得第一连接轴406带动第一滑块405在y轴上滑动,移动机构4两侧呈轴对称,两端的第一滑块405顶端固定安装的第二固定罩416随着第一滑块405的移动而移动,同步的第二电机409转动由第二转向器410的转动使得第二丝杆411转动,第二丝杆411另一端由第二轴承415固定,第二丝杆411上套接安装的第二连接轴413带动第二滑块412在x轴上滑动并由第二导轨414固定,移动机构4带动抓取机构5能够在x、y轴上移动,同步移动高效快速,节约时间,降低人工搬运的劳动成本。
31.如附图6所示,所述抓取机构5包括连接块501、伸缩杆502、第三电机503、第三转向器504、第三丝杆505、第三滑块506、第三导轨507、限位板508、支架509以及抓头510,所述连接块501底端固定安装有所述伸缩杆502,所述伸缩杆502底端固定安装有第三固定罩,所述第三固定罩内安装有所述第三电机503,所述第三电机503连接有所述第三转向器504,所述第三转向器504另一端固定连接有所述第三丝杆505,所述第三丝杆505套接安装有所述第三滑块506,所述第三丝杆505另一端安装有第三轴承,所述第三轴承固定安装在所述第三
固定罩一端内侧,所述第三导轨507固定安装在所述第三固定罩内部两端,所述第三滑块506固定安装有支架509,所述支架509通过所述限位板508与底端所述抓头510固定连接,所述限位板508固定安装在所述第三固定罩底端,对加工件进行抓取时,连接块501底端的伸缩杆502进行伸缩,使得抓取机构5在z轴上进行移动,伸缩杆502底端固定的第三固定罩也随着进行高度位置变化,第三固定罩底端固定安装的限位板508进行上下位置变换,第三固定罩内固定安装的第三电机503转动,经过第三转向器504的转换使得第三丝杆505由另一端第三轴承固定进行转动,套接安装在第三丝杆505上并由第三导轨507限定的第三滑块506进行上下移动,第三滑块506上下移动时使得支架509进行上下位置变化,支架509通过限位板508底端焊接的支杆使得对支杆底端活动安装的抓头510进行拉扯,使得抓头510进行合闭与张开对加工件进行抓取与放置,抓取牢固,省时省力,提高工作效率与移动机构4结合实现x、y、z三轴移动,精确高效。
32.如附图7所示,所述保护机构6包括第四固定罩601、第四电机602、第四转向器603、第四丝杆604、托盘605、第四轴承606、第五固定罩607、第五电机608、第五转向器609、第五丝杆610、第五滑块611、第五导轨612以及第五轴承613,所述第四固定罩601内安装有所述第四电机602,所述第四电机602连接有所述第四转向器603,所述第四转向器603另一端固定连接有所述第四丝杆604,所述第四丝杆604套接安装有第四滑块,所述第四丝杆604另一端安装有所述第四轴承606,所述第四轴承606固定安装在所述第四固定罩601一端内侧,所述第四固定罩601内部两端固定安装有第四导轨,所述第四固定罩601底端固定安装有所述第五滑块611,所述第五滑块611套接安装在所述第五丝杆610上,所述第五丝杆610一端固定安装有所述第五轴承613,所述第五轴承613另一端连接有所述第五转向器609,所述第五转向器609另一端连接有所述第五电机608,所述第五电机608安装在所述第五固定罩607内,所述第五固定罩607内部两端安装有所述第五导轨612,对机器人抓取的加工件进行保护时,第五固定罩607内固定的第五电机608转动,第五转向器609进行转换使得第五丝杆610转动,第五丝杆610另一端的第五轴承613进行固定且第五滑块611由第五导轨612限制,使得第五连接轴带动第五滑块611在y轴上滑动,保护机构6两侧呈轴对称,两端的第五滑块611顶端固定安装的第四固定罩601随着第五滑块611的移动而移动,同步的第四电机602转动由第四转向器603的转动使得第四丝杆604转动,第四丝杆604另一端由第四轴承606固定,第四丝杆604上套接安装的第四连接轴带动第四滑块在x轴上滑动并由第四导轨固定,第四滑块上安装的托盘605也随着移动,移动机构4在控制抓取机构5对加工件进行抓取抬高进行移动后,保护机构6使得托盘605移动至抓取机构5的下方进行对加工件进行保护,防止加工件掉落,造成损坏以及对下面工作人员造成安全隐患,提高安全性能。
33.如附图8所示,所述底脚7顶端焊接有螺纹丝杆702,所述螺纹丝杆702套接安装有螺母701,以便于底脚7上焊接的螺纹丝杆702使得底脚7能够进行高度调整,使得整体能够进行水平调整,螺母701对螺纹丝杆702进行固定,防止因振动或者晃动导致螺纹丝杆702松动,使得整体水平度不够,在抓取机构5对加工件进行抓取时,角度不当产生碰撞。
34.本发明工作原理:在工作时,伺服电机箱8内的伺服控制器与所有电机呈电性连接并由伺服控制器控制运行,首先,对支柱1底端的底脚7进行调整,旋动螺纹丝杆702,使得整体保持水平,并由螺母701对螺纹丝杆702位置进行固定,防止松动,导致水平不稳,然后伺服电机箱8同步控制移动机构4与抓取机构5内的电机,使得第一固定罩401内固定的第一电
机402转动,第一转向器403进行转换使得第一丝杆404转动,第一丝杆404另一端的第一轴承408进行固定且第一滑块405由第一导轨407限制,使得第一连接轴406带动第一滑块405在y轴上滑动,移动机构4两侧呈轴对称,两端的第一滑块405顶端固定安装的第二固定罩416随着第一滑块405的移动而移动,同步的第二电机409转动由第二转向器410的转动使得第二丝杆411转动,第二丝杆411另一端由第二轴承415固定,第二丝杆411上套接安装的第二连接轴413带动第二滑块412在x轴上滑动并由第二导轨414固定,第二滑块412上固定安装的连接块501使得抓取机构5进行移动,然后,连接块501底端的伸缩杆502进行伸缩,使得抓取机构5在z轴上进行移动,伸缩杆502底端固定的第三固定罩也随着进行高度位置变化,第三固定罩底端固定安装的限位板508进行上下位置变换,第三固定罩内固定安装的第三电机503转动,经过第三转向器504的转换使得第三丝杆505由另一端第三轴承固定进行转动,套接安装在第三丝杆505上并由第三导轨507限定的第三滑块506进行上下移动,第三滑块506上下移动时使得支架509进行上下位置变化,支架509通过限位板508底端焊接的支杆使得对支杆底端活动安装的抓头510进行拉扯,使得抓头510进行合闭与张开对加工件进行抓取与放置,抓取牢固,省时省力,提高工作效率与移动机构4结合实现x、y、z三轴移动,精确高效,在抓取机构5对加工件进行抓取抬起后,保护机构6上的托盘605移动至加工件底端,对加工件进行保护,防止加工件掉落,造成损坏以及对下面工作人员造成安全隐患,提高安全性能,最后,抓取机构5移动到加工件位置放置处,托盘605移走,将加工件轻轻下落放置在固定位置处,安全高效,节约时间,提高工作效率,降低人力成本。
35.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
36.其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
37.最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1