一种多功能捡球机器人
1.本发明属于捡球机器人领域,具体涉及一种多功能捡球机器人。
背景技术:
2.随着时代和科技的不断发展,智能化不断应用于人们的各项日常生活中。在平时的体育运动中,尤其是人们在进行网球、乒乓球、羽毛球等球类运动时,频繁地弯腰捡球在消耗体力的同时会占用很多时间,既让人们感觉到不方便,又会给人们带来不好的运动体验。尤其是在运动员训练的场地,经常会在训练完由人工一个一个地拣取地上的球,或者是使用一些简单的工具,但在这种情况下捡球会带来很大的工作量,同时捡球效率也会很低。
3.为了减轻捡球给人们带来的各种不便利,目前通常采用传统的捡球机用于捡球,但这种机器的体积大、结构复杂、成本高、工作效率低,需要人工操作,而且往往会把球类以外的其他杂物捡进来。
4.因此,为了减轻人们捡球时的工作量,节省捡球所用的时间,让人们进行体育运动的时候有更好的运动体验,提高捡球时的工作效率、节省体力和劳动力成本,已经成为了重要的研究方向。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种多功能捡球机器人。
6.为达到以上发明目的,本发明采用的技术方案为:
7.一种多功能捡球机器人,包括底盘、驱动电机、车轮、主控板、三自由度捡球机构、视觉识别模块、红外循迹模块、前斗收集模块,车轮安装于底盘的两侧,驱动电机用于驱动车轮转动;红外循迹模块、前斗收集模块安装于底盘的前端,红外循迹模块与主控板信号连接,用于控制机器人沿轨迹行走;前斗收集模块用于收集球;视觉识别模块与主控板信号连接,用于视觉识别球的位置;
8.其中,三自由度捡球机构包括安装于底盘上的旋转底座、立柱、转动杆、记忆金属件、中空转动杆、升降控制舵机、弹性套环、弹性套环开口控制舵机,立柱安装于旋转底座上,升降控制舵机和弹性套环开口控制舵机分别安装于立柱的中部和顶部,转动杆的一端安装于弹性套环开口控制舵机以控制转动杆转动,转动杆的另一端通过记忆金属件贯穿中空转动杆至与弹性套环的收紧端连接,弹性套环的收紧端贯穿金属环,金属环设于中空转动杆;通过弹性套环开口控制舵机控制转动杆转动,以控制弹性套环收紧;升降控制舵机控制中空转动杆转动,以控制弹性套环的升降;升降控制舵机和弹性套环开口控制舵机与主控板信号连接。
9.作为优选方案,所述前斗收集模块通过转动轴与升降舵机连接,升降舵机安装于底盘的前端;通过升降舵机控制转动轴转动,联动前斗收集模块升降。
10.作为优选方案,所述前斗收集模块包括两侧板和前挡板,两侧板相对的一端分别
通过转动轴安装于升降舵机和底盘上,两侧板相对的另一端分别与前挡板的两侧转动连接;两侧板与前挡板、底盘之间围成收纳空间,用于收集球;
11.两侧板对应于前挡板的前侧分别设有限位凸起,用于对前档板向收纳空间之外的转动限位。
12.作为优选方案,所述视觉识别模块为csi摄像头,相应地,主控板集成树莓派zero模块;csi摄像头通过csi数据线与树莓派zero模块连接。
13.作为优选方案,所述红外循迹模块具有多路红外传感器,相应地,主控板集成有stm32f407主控模块;红外传感器、树莓派zero模块与stm32f407主控模块信号连接。
14.作为优选方案,所述旋转底座通过架空层安装于底盘之上,架空层内用于安装主控板。
15.作为优选方案,所述旋转底座包括基座、旋转控制舵机和旋转座,底座安装于架空层上,旋转控制舵机安装于底座上,用于控制旋转座旋转;旋转座与基座同轴分布;旋转控制舵机与主控板信号连接。
16.作为优选方案,所述车轮有四个,每个车轮配置一个驱动电机。
17.作为优选方案,所述驱动电机为流星型直流电机。
18.作为优选方案,所述转动杆和中空转动杆为碳纤维材质。
19.与现有技术相比,本发明具有以下有益效果:
20.本发明的多功能捡球机器人,采用红外循迹模块可以让机器人在球场边缘线内循迹作直线运动,视觉识别模块用于获取要捡的球所处的方向及位置,套环的收放与旋转均由相应的舵机控制,弹性套环的弹性特点,使得可实现对不同形状大小球类的捡取;另外,前斗收集模块用于收集球;提升了捡球效率。
附图说明
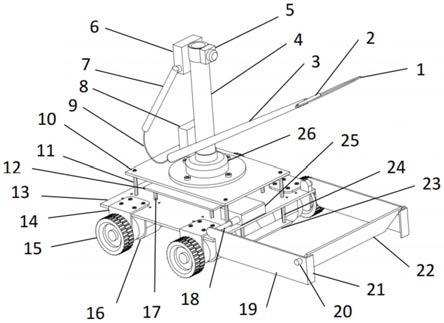
21.图1为本发明的一种多功能捡球机器人的结构示意图;
22.图2为本发明的一种多功能捡球机器人的控制机构的系统框图;
23.图3为本发明的一种多功能捡球机器人的电机驱动模块的电路原理图;
24.图4为本发明的一种多功能捡球机器人的红外循迹模块的电路原理图;
25.图5为本发明的一种多功能捡球机器人循迹的程序框图;
26.图6为本发明的一种多功能捡球机器人的底盘串级pid控制的原理框图;
27.图7为本发明的一种多功能捡球机器人采用机器视觉识别球类的原理框图。
28.图中:弹性套环-1、金属环-2、转动杆-3、立柱-4、csi摄像头-5、套环开口控制舵机-6、转动杆-7、总部升降控制舵机-8、记忆金属件-9、金属板-10、螺丝柱-11、主控板-12、底盘-13、金属外壳-14、车轮-15、直流电机-16、螺丝柱-17、转动轴-18、前斗收集模块-19、转动轴-20、挡板-21、活页-22、红外循迹模块-23、螺丝柱-24、前斗收集模块升降舵机-25、旋转底座-26、stm32f407主控单元-27、树莓派zero-28、惯性测量单元-29。
具体实施方式
29.为了更清楚地说明本发明实施例,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来
讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
30.如图1所示,本发明实施例的多功能捡球机器人,以stm32f407主控单元(即单片机)27为控制核心,树莓派zero 28为视觉驱动单元,整体包括机器人底盘13、三自由度捡球机构、视觉识别单元;
31.其中,机器人底盘13呈矩形,安装有控制核心部件:红外循迹模块23、前斗收集模块19、前斗收集模块用的升降舵机25、流星型直流电机16、车轮15、主控板12。
32.三自由度捡球机构由旋转底座26、塑料立柱4、摄像头5、升降控制舵机8(即中部升降控制舵机)、套环开口控制舵机6(即顶部开口控制舵机)、中空转动杆3、转动杆7、记忆金属件9、弹性套环1组成。所述的视觉识别单元,包含了树莓派zero28及csi摄像头模块5组成。红外循迹模块23位于机器人前端,前斗收集模块19通过转动轴18与机器人前端连接,转动轴18由粘连固定在底盘13上的升降舵机25控制,四个直流电机16控制驱动车轮15,电机16套有金属外壳14通过螺钉固定在底盘13上,主控板12通过螺丝柱17固定在底盘13上方。其中,旋转底座26包括基座、旋转控制舵机26(即底部旋转控制舵机)和旋转座,基座通过螺钉固定在主控板12上方的金属板10上,旋转控制舵机可控制旋转座旋转。塑料立柱4粘接固定在旋转底座26上,立柱4最上方粘接了一个csi摄像头5,csi摄像头5和舵机均由导线与主控板12连接,升降控制舵机和弹性套环开口控制舵机分别安装于立柱的中部和顶部,转动杆的一端安装于弹性套环开口控制舵机以控制转动杆转动,转动杆的另一端通过记忆金属件贯穿中空转动杆至与弹性套环的收紧端连接,弹性套环的收紧端贯穿金属环,金属环设于中空转动杆;通过弹性套环开口控制舵机控制转动杆转动,以控制弹性套环收紧;升降控制舵机控制中空转动杆转动,以控制弹性套环的升降;升降控制舵机和弹性套环开口控制舵机与主控板信号连接;立柱4上有两个舵机6、8可分别控制两个碳纤维转动杆7、3转动,转动杆通过记忆金属件9连接,并连接到其中一个转动杆3的前端的弹性套环1处,可控制弹性套环1的伸缩,弹性套环1与转动杆3的连接处由金属环2固定。
33.机器人底盘13呈矩形,红外循迹模块23具备10路红外传感器,通过螺丝柱24固定于机器人的前端,通过导线与主控板12连接,并利用i2c与stm32f407主控单元27进行数据通信。
34.前斗收集模块19通过转动轴18与固定在机器人前端的升降舵机25连接,前斗收集模块19前端的两侧均有短的挡板21,活页22通过转动轴20连接在前斗收集模块19上,挡板21能挡住活页22,进而使得活页22只向内转动而无法向外转动,从而保证球只进不出。
35.三自由度捡球机构的旋转底座26通过螺钉固定在主控板12上方的金属板10上,金属板10通过螺丝柱11与底盘13连接固定,旋转底座26下部有一个底部旋转控制舵机可控制底座旋转。
36.立柱4粘接固定在旋转底座26上,立柱4最上方粘接固定了一个csi摄像头模块5,csi摄像头模块5由csi数据线与树莓派zero 28连接。立柱4为塑料材质,立柱4上利用螺丝安装有套杆套环开口控制舵机6和升降控制舵机8可分别控制两个碳纤维转动杆7、3转动,两个转动杆通过记忆金属9连接,并连接到其中一个转动杆3前端的弹性套环1处,弹性套环1与转动杆3的连接处由金属环2进行转接。当套环开口控制舵机6转动时将带动碳纤维转动杆7向后转动,进而通过记忆金属9带动弹性套环1收紧实现抓取的功能。
37.主控板12由stm32f407主控单元27和树莓派zero 28利用印刷电路板工艺链接,其中,树莓派zero 28接收来自csi摄像头5的视频信号,通过uart协议与stm32f407主控单元进行通信。
38.当升降控制舵机8转动时,将会带动碳纤维转动杆3进行升降控制,进而实现收起的能力,并配合弹性套环1、旋转底座26实现抓取功能。记忆金属件9由于具备一定的柔韧性同时具有复原的能力,使得记忆金属9在碳纤维转动杆3收起时不会由于弯曲而不可使用。
39.另外,底座上还设有惯性测量单元29,例如陀螺仪,用于获取底座自身的姿态;惯性测量单元29与主控板12信号连接,以便主控板根据惯性测量单元反馈的信息,执行机器人的相应动作。
40.本实施例的多功能捡球机器人的控制原理如下:
41.如图2、图5所示,机器人控制机构的主控单元采用stm32f407芯片,主控单元主要包括4个直流电机的驱动模块、4个舵机的驱动模块、信号接口、复位电路及按键控制模块,电源模块采用12v锂电池作为直流电源。四个直流电机控制4个驱动轮,电机驱动模块的电路原理图如图3所示,p8为电机驱动模块的接口与stm32f407芯片的引脚连接,u2、u3、u4、u5为tle5205-2直流电机驱动芯片,jp2、jp3、jp4、jp5为直流电机,p3、p4、p5、p6为编码器,安装在电机上用于测量电机转角及转速,cb1和cb2为去耦电容,电机驱动模块采用pwm信号对4个流星型直流电机的转速进行调节,电路中的tle5205-2针对直流电机的管理应用进行了优化,具有滞后功能的过温保护和诊断。机器人的结构中共有4个舵机,分别控制前斗收集模块的升降、套杆结构的底座的旋转、两个碳纤维转动杆的转动,舵机的驱动模块使用pwm信号对舵机进行控制,调节pwm的占空比来实现不同的转动角度,通过分别控制四个舵机实现前斗收集模块和套杆同时捡球。机器人通过左右两侧驱动轮差速和红外定位及视觉定位来调整行走方向,转弯通过mpu6050陀螺仪来调整角度,将mpu6050安装在机器人的旋转中心,mpu读取到的角速度即为机器人的角速度,主控单元与mpu6050陀螺仪采用i2c协议进行通信。红外循迹模块的电路原理图,如图4所示,vt为供电电源,t1、t2、t3、t4、t5、t6、t7、t8、t9、t10为红外传感器tcrt5000,ain0、ain1、ain2、ain3、ain4、ain5、ain6、ain7、ain8、ain9、ain10为红外传感器的10路输出,与控制芯片stm32f103c8t6的io口连接,10路红外tcrt5000进行红外循迹,红外循迹模块与主控单元采用i2c协议进行通信。摄像头模块采用csi接口与树莓派zero连接,主控单元与树莓派之间采用uart进行串口通信。
42.本实施例的多功能捡球机器人的工作流程如下:
43.如图5所示,按下启动键后,机器人开始循迹,在机器人移动的过程中,通过不断读取红外循迹模块和mpu6050陀螺仪的信号,在主控单元中进行比较计算,从而判断是否偏离路线,进而决定是否要调整运动方向,如果不调整方向就继续循迹,直到到达目的地。为了改善机器人系统的动态性能,比如降低超调量和缩短调节时间,同时保证机器人能在没有循迹的时候保持直线运动,红外循迹模块和mpu6050陀螺仪共同工作进行串级pid控制,具体实现原理如图6所示,将红外循迹与角速度环作为外环,速度环作为内环,将期望值与实际值进行比较,再将当前偏差值反馈到控制器中,实现对系统的精确控制。机器人采用机器视觉识别球类的原理如图7所示,从之前数据集上预训练好的模型单独对所需要捡的球类进行训练,从而可以大幅度降低训练时长,为提高模型在jetson xavier上的运行速度,采用tensorrt对模型进行优化,并利用nvidia提供的视频采集接口提高视频获取效率,同时
针对图像传送,机器人在零拷贝提高视频传输效率的基础上利用udp进行视频远程传输。
44.以上所述仅是对本发明的优选实施例及原理进行了详细说明,对本领域的普通技术人员而言,依据本发明提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1