一种远程医疗服务机器人的制作方法
1.本实用新型涉及医疗示教设备技术领域,尤其涉及一种远程医疗服务机器人。
背景技术:
2.从中国制造2025口号和新一代人工智能发展规划可以看出,人工智能已经成为了新一轮科技革命的突破口和产业变革的核心驱动力。在医疗领域,服务机器人是提升工作效率的重要帮手,在未来也会成为我国医疗服务高质量发展的重要推手。
3.现有的服务机器人起到的更多的是导向和迎宾的作用,不能很好的服务于临床治疗和医疗示教过程中,很多医师无法临床进行诊断,需要远程指导和诊断,同时在医师进行诊断和治疗过程中,现有的学习医生就通过跟随医师进入病房学习,观察医师操作,会造成大量人员涌入病房,病房拥挤,而且医师治疗和操作不能进行很好的多方面观看,不但影响医师判断和患者的诊疗时机,也影响学习者的临床学习过程。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种远程医疗服务机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种远程医疗服务机器人,包括驱动底座,所述驱动底座的顶部外壁设有机体,且机体的顶端外壁固定连接有机头,所述机体的一侧外壁设有操作台,且操作台的外壁设有触控屏,所述机体的另一侧外壁固定连接有推把,且推把的两侧外壁均设有喇叭,所述操作台的底端外壁设有病例识别台,且操作台的底端位于病例识别台的一侧设有收音器和病例采相探头,所述机体位于病例识别台的底端外壁设有报告打印终端,所述机体的外壁另一侧底部设有后仓,且后仓的内壁设有aed,所述机头的内壁中部设有录播探头,且机头的外壁靠近录播探头的一侧设有红外传感器,所述红外传感器的信号端和录播探头之间通过电性连接;机身内设置有无线通信模块,用于与远程终端通信。
7.作为本实用新型进一步的方案,所述报告打印终端的信号端和病例识别台、触控屏之间通过电性连接,且报告打印终端的人体采相信号端和录播探头之间通过电性连接。
8.作为本实用新型进一步的方案,所述病例识别台内设有感应线圈,且病例采相探头通过ocr扫描技术对感应线圈位置上的病例进行扫描识别。
9.作为本实用新型进一步的方案,所述驱动底座包括驱动电机、驱动轮、转向电机和转向轮,所述驱动电机的输出轴和驱动轮之间传动联动,所述转向电机的输出轴和转向轮之间传动联动。
10.作为本实用新型进一步的方案,所述机体的底端外壁设有避障单元,且避障单元包括测距仪和避障传感器,所述测距仪和避障传感器的信号端与驱动底座的内部之间通过电性连接。
11.作为本实用新型进一步的方案,所述后仓的内壁设有仓门,且仓门的端部内壁设
有电控锁。
12.作为本实用新型进一步的方案,所述驱动电机、转向电机、病例采相探头、触控屏和录播探头均连接有开关,且开关通过导线连接有微处理器。
13.本实用新型的有益效果为:
14.1.本医疗服务机器人主要用于远程连接医师和示教对象之间的设备仪器,在医生手术时,手术室不方便进入太多助手,此时可选择让将该医疗服务机器人进行手术室,通过录播探头对医生的手术过程记录下来并将情况传输至远程终端,供远程终端的用户观看学习。
15.2.在疫情期间,为了减少不必要的接触,医生可通过该医疗服务机器人对病人进行会诊,通过录播探头采集病人的图像,通过收音器采集病人自述的病情等,还可以通过病例识别台扫描病人的以往病例发给医生查阅,医生会诊结束后可通过报告打印终端打印病历单以及取药单给病人,实现会诊过程医生与患者的零接触;
16.3.本医疗服务机器人的后部设有aed,可对临床中紧急状况做出心脏起搏操作,也对示教对象临床教学aed的使用步骤和操作流程,可提高应急效率和紧急应急方案的示教。
附图说明
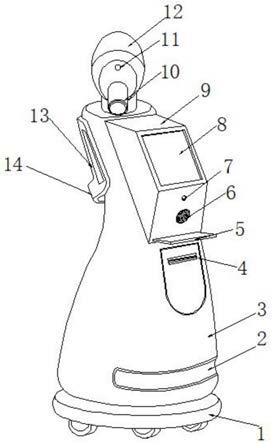
17.图1为本实用新型提出的一种远程医疗服务机器人的立体结构示意图;
18.图2为本实用新型提出的一种远程医疗服务机器人的侧视结构示意图;
19.图3为本实用新型提出的一种远程医疗服务机器人的后视结构示意图。
20.图中:1、驱动底座;2、避障单元;3、机体;4、报告打印终端;5、病例识别台;6、收音器;7、病例采相探头;8、触控屏;9、操作台;10、录播探头;11、红外传感器;12、机头;13、喇叭;14、推把;15、后仓;16、aed。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.参照图1
‑
3,一种远程医疗服务机器人,包括驱动底座1,驱动底座1的顶部外壁设有机体3,且机体3的顶端外壁固定连接有机头12,机体3的一侧外壁设有操作台9,且操作台9的外壁设有触控屏8,机体3的另一侧外壁固定连接有推把14,且推把14的两侧外壁均设有喇叭13,操作台9的底端外壁设有病例识别台5,且操作台9的底端位于病例识别台5的一侧设有收音器6和病例采相探头7,机体3位于病例识别台5的底端外壁设有报告打印终端4,机体3的外壁另一侧底部设有后仓15,且后仓15的内壁设有aed16,机头12的内壁中部设有录播探头10,且机头12的外壁靠近录播探头10的一侧设有红外传感器11,红外传感器11的型号为hc
‑
sr501,红外传感器11的信号端和录播探头10之间通过电性连接,机身内设置有无线通信模块,用于与远程终端通信。报告打印终端4的信号端和病例识别台5、触控屏8之间通过电性连接,且报告打印终端4的人体采相信号端和录播探头10之间通过电性连接,病例识别台5内设有感应线圈,且病例采相探头7通过ocr扫描技术对感应线圈位置上的病例进行扫描识别,驱动底座1包括驱动电机、驱动轮、转向电机和转向轮,驱动电机的输出轴和驱
动轮之间传动联动,转向电机的输出轴和转向轮之间传动联动,机体3的底端外壁设有避障单元,且避障单元包括测距仪和避障传感器,测距仪和避障传感器的信号端与驱动底座1的内部之间通过电性连接,测距仪的型号为ls
‑
1,避障传感器的型号为e18
‑
d80nk,后仓15的内壁设有仓门,且仓门的端部内壁设有电控锁,驱动电机、转向电机、病例采相探头7、触控屏8和录播探头10均连接有开关,且开关通过导线连接有微处理器,微处理器的型号为s7
‑
200。特别的,无线通信模块采用低功耗lora通信模块。该通信模块分别与机器人中的触控屏、病例识别台、收音器、病例采相探头、报告打印终端、录播探头、微处理器等电性相连,用以将这些模块采集的信息传输至远程终端或者接收远程终端的指令。
23.本远程医疗服务机器人的具体工作原理如下:
24.第一,本机器人通过推把14推动,或者利用遥控器控制其前进和转向,其驱动底座1和避障单元2可使机器人平稳的执行遥控器的规划路线,驱动至指定目的地,该目的地可以是手术室或者是病患处;
25.第二,然后通过内部主机连接远程终端,开始手术观摩操作或者远程会诊操作。
26.当进行远程会诊时,将病患的病例放置病例识别台5,利用病例采相探头7翻录病例,利用录播探头采集病人的图像或者视频,通过收音器采集患者关于病情的自述等,机器人将上述信息传递至位于远程终端的医生处,医生根据收到的以往病例以及病情等信息做出诊断,并将诊断结果传输至机器人,通过报告打印终端打印出病历单以及取药单,实现整个会诊过程医生与患者的零接触;
27.当进行手术观摩操作时,将医疗服务机器人驱动至手术室,通过录播探头以及收音器将手术室内的手术情况采集并传输至位于远程终端的观摩人员处,供观摩人员进行学习与交流。
28.在本实用新型的描述中,需要理解的是,术语“同轴”、“底部”、“一端”、“顶部”、“中部”、“另一端”、“上”、“一侧”、“顶部”、“内”、“前部”、“中央”、“两端”、“第一”、“第二”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
29.在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
30.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1