一种智能家居看护机器人
1.本实用新型涉及智能家居技术领域,具体是一种智能家居看护机器人。
背景技术:
2.养老护理劳动力极其缺乏,机器人减少国家的养老护理劳动力输出,并且可以减少养老护理人员对老人施暴及偷窃财务的概率,研究表明,患有老年痴呆老人病多发生在没有人或宠物陪伴的老人身上,机器人可以使老人不感到孤单、寂寞。
3.为此,我们提供一种智能家居看护机器人用于家庭无人看护老人或养老院中对老人的实时监控帮手,实现养老机器化。
技术实现要素:
4.为解决上述问题,本实用新型提供了一种智能家居看护机器人,其包括本体、活动部以及行走机构,其特征在于,所述本体安装于行走机构之上,本体两侧安装有活动部;本体上设置有传感组件,传感组件包括包括内部传感器和外部传感器,其中内部传感器包括编码器,加速度传感器,外部传感器路径规划组件、人机交互组件、主控制板。
5.进一步地,作为优选,所述活动部包括机械臂抓取机构和托盘放置伸缩机构,机械臂抓取机构为多自由度机械臂;托盘放置伸缩机构上设有支撑护栏。
6.进一步地,作为优选,所述路径规划组件包括视觉传感器、超声波测距传感器以及红外传感器;所述人机交互组件包括显示模块、语音识别模块;所述主控制板设置于本体后侧,所述主控制板包括主控板和扩展板。
7.进一步地,作为优选,所述行走机构设置为履带,其通过双轴直流电动机带动两侧后驱动轮;所述行走机构还包括设于机器人后方的万向轮。
8.进一步地,作为优选,所述机械臂抓取机构包括关节模块和机械手模块,关节模块由四个270
°
伺服电机构成了多自由度机械臂;机械手模块采用伺服电机带动机械手的开合。
9.进一步地,作为优选,所述托盘放置伸缩机构包括支撑护栏、固定板、支撑件,支撑护栏内侧设有防滑圈;支撑件连接于固定板与支撑护栏之间,且支撑件内设有升缩杆,升缩杆活塞杆一端铰接于支撑护栏下部,升缩杆外侧设有弹性材料制得的套筒。
10.与现有技术相比,本实用新型的有益效果为:
11.本实用新型通过路径规划系统是通过机器人所感知到的工作环境信息状况,依据优化指标,在起始点至目标点规划一条与环境障碍无碰撞、无干涉的路径,并实现所需清扫区域的合理完全路径覆盖;
12.通过采用了超声波传感器与红外传感器来实现避障功能,当机器人前方突然出现物体时可通过超声波传感器识别,通过内部系统监测运算立即反馈至驱动装置实现避障;
13.通过背面的语音模块识别语言语音并回应,实现机器人与人之间的语音交互。
附图说明
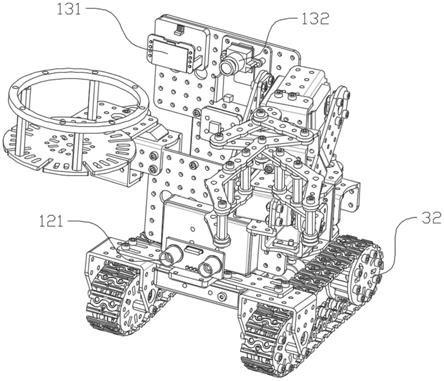
14.图1为智能家居看护机器人的立体图;图2为智能家居看护机器人的正视结构示意图;图3为智能家居看护机器人的侧面结构示意图;图4为智能家居看护机器人的立体图二;图5为智能家居看护机器人的机械臂抓取机构的结构示意图;图6为智能家居看护机器人的托盘放置伸缩机构的结构示意图;
15.图中:10
‑
本体;20
‑
活动部;30
‑
行走机构;11
‑
传感组件;12
‑
路径规划组件;13
‑
人机交互组件;14
‑
主控制板;121
‑
超声波测距传感器;122
‑
近红外传感器;131
‑
显示模块;132
‑
视觉传感器;21
‑
抓取机构;22
‑
托盘机构;211
‑
关节模块、212
‑
机械手模块、221
‑
支撑护栏;222
‑
固定板;223
‑
支撑件;224
‑
升缩杆;225
‑
防滑圈;31
‑
履带;32
‑
驱动轮;33
‑
万向轮。
具体实施方式
16.本实用新型提供了一种智能家居看护机器人,结构简单、换热效率高、散热性能优良,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
17.一种智能家居看护机器人,其包括本体10、活动部20以及行走机构30,其特征在于,所述本体10安装于行走机构30之上,本体10两侧安装有活动部20;本体10上设置有传感组件11,传感组件11包括内部传感器和外部传感器,其中内部传感器包括编码器,加速度传感器,外部传感器包括路径规划组件12、人机交互组件13、主控制板14。
18.活动部20包括机械臂抓取机构21和托盘放置伸缩机构22,机械臂抓取机构21为多自由度机械臂;托盘放置伸缩机构22上设有支撑护栏221,该两机构都为可更换模块,可根据功能特殊性进行所需模块更换,实现多功能作业。
19.路径规划组件12包括视觉传感器132、超声波测距传感器121以及红外传感器;所述人机交互组件13包括显示模块131、语音识别模块;所述主控制板14设置于本体10后侧,所述主控制板14包括主控板和扩展板。
20.行走机构30设置为履带31,其通过双轴直流电动机带动两侧后驱动轮32;所述行走机构30还包括设于机器人后方的万向轮33,履带式设计可大大减小地形环境所带来的影响因素,以保证机器人稳定行进;通过控制一侧后轮毂单独转动则可以实现机器人的左右转向,控制两侧后轮毂同时以相反方向转动则可以使机器人达到原地旋转的操作。
21.机械臂抓取机构21包括关节模块211和机械手模块212,关节模块由四个270
°
伺服电机构成了多自由度机械臂;机械手模块采用伺服电机带动机械手的开合。
22.托盘放置伸缩机构22包括支撑护栏221、固定板222、支撑件223,支撑护栏221内侧设有防滑圈225;支撑件223连接于固定板222与支撑护栏221之间,且支撑件223内设有升缩杆224,升缩杆224活塞杆一端铰接于支撑护栏221下部,升缩杆224外侧设有弹性材料制得的套筒,在支撑护栏下设置升缩杆活动连接,可以在需要的时候将托盘倾斜一定角度,方便用户使用,同时使用弹性材料套筒套设于升缩杆外侧,可以在升缩杆伸缩时,发生弹性变形,仍然连接于固定板与支撑护栏之间,设置防滑圈,有效地防止托盘在倾斜时产生滑落风险。
23.具体实施方式,一种智能家居看护机器人,在使用时,机器人通过视觉传感器采用ccd摄像机进行机器人的视觉导航与定位、目标识别和地图构造等;超声波传感器测量机器
人工作环境中障碍物的距离信息和地图构造等,依据优化指标,在起始点至目标点规划一条与环境障碍无碰撞、无干涉的路径;
24.用户通过人机交互组件语音控制机器人或者通过屏幕控制机器人,机器人移动到指定区域通过抓取机构、托盘机构进行取料;
25.同时,机器人通过视觉传感器对看护对象进行监控,当检测到看护对象有不良状态时,发出警报。
26.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1