一种舞蹈机器人
1.本实用新型涉及机器人技术领域,尤其是涉及一种舞蹈机器人。
背景技术:
2.机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、服务业、建筑业甚至军事等领域中均有重要用途。
3.目前为了取悦一些儿童,一些工厂会生产出跳舞机器人陪儿童玩耍,但是跳舞机器人虽然四肢灵活,但是其头部呆板,无法和肢体形成动作配合,进而降低了趣味性,所以我们提出了一种舞蹈机器人,用以解决上述所提出的问题。
技术实现要素:
4.实用新型目的:为了克服背景技术的不足,本实用新型公开了一种舞蹈机器人。
5.技术方案:本实用新型所述的舞蹈机器人,包括躯体以及腿部,所述躯体的两侧均固定安装有步进电机,所述步进电机的输出轴上固定安装有手臂,所述躯体的顶部中心位置固定安装有转动轴,所述转动轴的顶部转动安装有头部,所述头部的底部分别固定安装有第一弧形板和第二弧形板,且第一弧形板和第二弧形板以转动轴的中心线对称设置,所述躯体的顶部开设有第一弧形槽,所述第一弧形板延伸至第一弧形槽内,所述第一弧形板的内侧固定安装有弧形齿条,所述第一弧形槽的一侧内壁转动安装有转轴,所述转轴的外侧固定套设有弧形齿轮,所述第一弧形槽内固定安装有驱动转轴进行转动的驱动组件,所述躯体的顶部开设有第二弧形槽,所述第一弧形槽的底部内壁和第二弧形槽的底部内壁上均固定安装有按钮,两个按钮分别和两个步进电机电性连接,所述第二弧形板的底部延伸至第二弧形槽内并固定安装有推动块,所述第二弧形槽内壁固定安装支撑杆,所述第二弧形板贯穿支撑杆并和支撑杆滑动连接,所述第二弧形板的外侧套设有弹簧,所述弹簧两端分别连接支撑杆的底部及推动块的顶部;
6.所述弧形齿轮上齿轮为周向局部连续设置,所述头部在弹簧作用下处于平衡状态时,第一弧形板端部到按钮的距离等于弧形齿轮上齿轮的周向长度,致使弧形齿轮带动第一弧形板按动按钮后,齿轮和弧形齿条随即脱离啮合。
7.进一步的,驱动转轴进行转动的驱动组件,包括固定安装在第一弧形槽一侧内壁的旋转电机,所述旋转电机的输出轴上固定安装有第一皮带轮,所述转轴的一侧圆心位置上固定安装有第二皮带轮,所述第一皮带轮和第二皮带轮的外侧套设有皮带,启动旋转电机,在第一皮带轮、第二皮带轮和皮带的传动下可以带动转轴进行转动。
8.进一步的,所述第一弧形槽的一侧内壁上固定安装有轴承,所述转轴的一端延伸至轴承的内圈并和轴承的内圈固定连接。
9.进一步的,所述第一弧形板的一侧固定安装有弧形滑块,所述第一弧形槽的一侧
内壁上固定安装有弧形滑轨,第一弧形板通过弧形滑块和弧形滑轨滑动连接。
10.进一步的,所述躯体两侧固定安装有对称设置的两个彩灯,两个所述按钮分别和两个彩灯电性连接。
11.进一步的,所述躯体两侧固定安装有对称设置的两个电池,与机器人上所有电子器件电性连接,为其供电。
12.进一步的,所述腿部底部固定安装有对称设置的两个万向轮,利用万向轮便于推动舞蹈机器人本体进行移动,提高其便携性。
13.本舞蹈机器人工作时,启动旋转电机,旋转电机利用第一皮带轮、第二皮带轮和皮带的配合效果下,可以带动转轴进行转动,而转轴会带动弧形齿轮进行转动,且弧形齿轮和弧形齿条相啮合,所以可以带动弧形齿条进行移动,进而可以拉动头部摆动,同时头部摆动时会拉动第二弧形板并压缩弹簧,当弧形齿条按动第一弧形槽内的按钮时,此时按钮会开启位于躯体右部的彩灯和步进电机,进而彩灯会亮起,步进电机会带动右侧手臂摆动,而第一弧形板按动按钮后,弧形齿轮和弧形齿条脱离啮合,此时在弹簧的复位弹力下,可以使得第二弧形板的一端向第二弧形槽内进行移动,且第二弧形板会带动推动块向第二弧形槽的内部移动,推动块会按动按钮,此时会控制躯体左侧的彩灯和手臂,此时左侧的彩灯会亮起,步进电机会带动左侧手臂摆动,如此往复持续,则可以形成了头部往复摆动的同时可以使得两个彩灯交替亮起,以及两个手臂交替摆动。
14.有益效果:与现有技术相比,本实用新型的优点为:设计结构巧妙,其头部灵活摆动,有效的和肢体形成动作配合,同时交替亮起灯光,大大提高了其趣味性。
附图说明
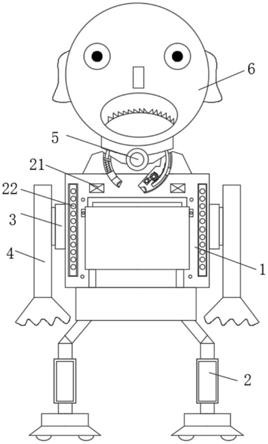
15.图1是本实用新型整体结构示意图;
16.图2是本实用新型部分结构示意图;
17.图3是图2中a处放大图。
具体实施方式
18.下面结合附图和实施例对本实用新型的技术方案作进一步的说明。
19.如图1、图2及图3所示的舞蹈机器人包括躯体1,躯体1的底部固定安装有对称设置的两个腿部2,躯体1的两侧均固定安装有步进电机3,步进电机3的输出轴上固定安装有手臂4,躯体1的顶部中心位置上固定安装有转动轴5,转动轴5的顶部转动安装有头部6,头部6的底部分别固定安装有第一弧形板7和第二弧形板17,且第一弧形板7和第二弧形板17以转动轴5的中心线对称设置,躯体1的顶部开设有第一弧形槽8,第一弧形板7的底部延伸至第一弧形槽8内,第一弧形板7的内侧固定安装有弧形齿条9,第一弧形槽8的一侧内壁转动安装有转轴10,转轴10的外侧固定套设有弧形齿轮11,第一弧形槽8内固定安装有驱动转轴10进行转动的驱动组件,躯体1的顶部开设有第二弧形槽18,第一弧形槽8的底部内壁和第二弧形槽18的底部内壁上均固定安装有按钮16,第二弧形板17的底部延伸至第二弧形槽18内并固定安装有推动块23,第二弧形槽18的两侧内壁上固定安装有同一个支撑杆19,第二弧形板17贯穿支撑杆19并和支撑杆19滑动连接,第二弧形板17的外侧套设有弹簧20,弹簧20的顶部和支撑杆19的底部固定安装有,弹簧20的底部和推动块23的顶部固定连接,躯体1两
侧固定安装有对称设置的两个彩灯22,两个按钮16分别和两个彩灯22电性连接,两个按钮16分别和两个步进电机3电性连接。
20.所述弧形齿轮11上齿轮为周向局部连续设置,所述头部6在弹簧20作用下处于平衡状态时,第一弧形板7端部到按钮16的距离等于弧形齿轮11上齿轮的周向长度,致使弧形齿轮11带动第一弧形板7按动按钮16后,齿轮和弧形齿条9随即脱离啮合。
21.躯体1两侧固定安装有对称设置的两个电池21,且两个电池21分别和两个彩灯22与两个步进电机3电性连接,利用电池21可以为彩灯22和步进电机3提供电源,
22.驱动组件包括固定安装在第一弧形槽8一侧内壁的旋转电机12,旋转电机12的输出轴上固定安装有第一皮带轮13,转轴10的一侧圆心位置上固定安装有第二皮带轮14,第一皮带轮13和第二皮带轮14的外侧套设有皮带15,启动旋转电机12,在第一皮带轮13、第二皮带轮14和皮带15的传动下可以带动转轴10进行转动,第一弧形板7的一侧固定安装有弧形滑块,第一弧形槽8的一侧内壁上固定安装有弧形滑轨,且弧形滑块和弧形滑轨滑动连接,腿部2的底部固定安装有对称设置的两个万向轮,利用万向轮便于推动舞蹈机器人本体进行移动,提高其便携性,第一弧形槽8的一侧内璧上固定安装有轴承,转轴10的一端延伸至轴承的内圈并和轴承的内圈固定连接。
23.工作原理:在需要此舞蹈机器人本体头部6和手臂4进行配合摆动时,此时启动旋转电机12,旋转电机12利用第一皮带轮13、第二皮带轮14和皮带15的配合效果下,可以带动转轴10进行转动,而转轴10会带动弧形齿轮11进行转动,且弧形齿轮11和弧形齿条9相啮合,所以可以带动弧形齿条9进行移动,进而可以拉动头部6摆动,同时头部6摆动时会拉动第二弧形板17并压缩弹簧20,当弧形齿条9按动第一弧形槽8内的按钮16时,此时按钮16会开启位于躯体1右部的彩灯22和步进电机3,进而彩灯22会亮起,步进电机3会带动右侧手臂4摆动,而第一弧形板7按动按钮16后,弧形齿轮11和弧形齿条9脱离啮合,此时在弹簧20的复位弹力下,可以使得第二弧形板17的一端向第二弧形槽18内进行移动,且第二弧形板17会带动推动块23向第二弧形槽18的内部移动,推动块23会按动按钮16,此时会控制躯体1左侧的彩灯22和手臂4,此时左侧的彩灯22会亮起,步进电机3会带动左侧手臂4摆动,如此往复持续,则可以形成了头部6往复摆动的同时可以使得两个彩灯22交替亮起,以及两个手臂4交替摆动。
24.本技术方案中步进电机3、旋转电机12、电池21、彩灯22等机电元件的工作原理和接线方法均属于本领域常规手段或者公知常识。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1