采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统的制作方法
1.本实用新型涉及矿用巡检机器人系统领域,特别涉及采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统。
背景技术:
2.目前市面上的轨道式巡检机器人种类繁多,在电站、煤矿及管廊领域应用广泛,此类巡检机器人结构简单,通过安装于轨道两侧的驱动轮来实现行走、爬坡,完成巡检的目的,此类机器人单纯采用蓄电池作为机器人驱动动力源和内部器件所用电源,由于驱动耗电量大,故蓄电池续航时间短,需要频繁的充电才能完成巡检任务,效率低下,且此类机器人适用于现场环境较好、干燥的场合,在环境恶劣、潮湿、大倾角巷道的环境下巡检时,容易出现打滑,上坡停机时易溜坡等不良现象,给巡检工作带来不利影响。
技术实现要素:
3.本实用新型的主要目的在于提供采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统,可以有效解决背景技术中的技术问题。
4.为实现上述目的,本实用新型采取的技术方案为:
5.采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统,包括引导轨组件、驱动机构和机器人本体,所述引导轨组件包括驱动装置、轨道、钢丝绳、巷道横梁、拖轮组件、吊装梁和张紧轮,所述驱动机构包括驱动轮组件、安装板、承重轮组件、电动抱索器、抱索器滑轨组件、发电机组件和固定架,所述机器人本体包括有语音声光报警器、多参数传感器、固定摄像头、直流稳压电源、控制箱、烟雾传感器和双目云台摄像仪。
6.作为本实用新型的进一步方案,所述巷道横梁的数量为两个,所述轨道通过吊装梁固定连接在两个巷道横梁之间,所述拖轮组件固定安装在巷道横梁的上部。
7.作为本实用新型的进一步方案,所述驱动装置通过驱动电机和转轮组成,所述驱动电机和张紧轮均有支架固定,所述转轮固定连接在驱动电机的输出轴一端,所述钢丝绳套设在转轮与张紧轮之间。
8.作为本实用新型的进一步方案,所述驱动轮组件通过固定架对称布置在安装板的上部两侧,所述承重轮组件对称布置在安装板的上部两侧位于驱动轮组件的前部位置,所述电动抱索器通过抱索器滑轨组件设置在安装板的上部靠近边缘位置,所述发电机组件固定安装在安装板的底部。
9.作为本实用新型的进一步方案,所述驱动轮组件由轮支架、主动轮、主动轴、从动轮、调节件和压簧组成,所述轮支架的数量为两组,其中一组所述轮支架固定安装在安装板的上部,所述主动轮通过主动轴与其中一组轮支架转动连接,其中另一组所述轮支架通过调节件活动连接在安装板的上部,所述压簧设置在其中另一组轮支架和调节件之间,所述从动轮转动连接在其中另一组轮支架的内侧,一侧所述主动轴与发电机组件输入轴固定连接,另一侧所述主动轴的底端固定连接有编码器。
10.作为本实用新型的进一步方案,所述抱索器滑轨组件包括滑轨支架、滑杆和缓冲弹簧,所述滑轨支架固定安装在安装板的上部靠近边缘位置,所述滑杆固定连接在滑轨支架的顶部内侧,所述电动抱索器滑动连接在滑杆的外部,所述缓冲弹簧套设在滑杆的外部位于电动抱索器和滑轨支架之间位置。
11.作为本实用新型的进一步方案,所述固定摄像头固定安装在安装板的底部,所述多参数传感器固定安装在安装板的底部位于固定摄像头的外侧,所述直流稳压电源固定安装在安装板的底部靠近后方位置,所述语音声光报警器固定安装在直流稳压电源底部一侧拐角位置,所述控制箱固定安装在安装板的底部位于直流稳压电源的前部位置,所述烟雾传感器固定连接在直流稳压电源的底部另一侧拐角位置,所述双目云台摄像仪固定安装在直流稳压电源的底部靠近中间位置。
12.与现有技术相比,本实用新型具有如下有益效果:本实用新型中,此机器人系统由牵引导轨组件、驱动机构、机器人本体组成,牵引导轨组件通过驱动电机带动驱动轮转动,从而带动环形钢丝绳转动,钢丝绳中间部位由拖轮组件托住,通过张紧装置使钢丝绳张紧,其驱动机构通过电动抱索器来实现抱索器抓手抓紧或松开牵引钢丝绳,从而达到驱动机构及机器人本体的运动或停止,机器人运动时可对机器人本体负载供电及对直流稳压电源电池组充电,直流稳压电源其控制器可对检测到的发电机输出电压做出判断以做出不同的供电方式给负载供电,其中外接电源和电池供电切换无延时,表现为不间断电源,以保证巡检机器人连续、长距离巡检。
附图说明
13.图1为本实用新型采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统的整体轴侧图;
14.图2为本实用新型采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统的牵引导轨组件轴侧图;
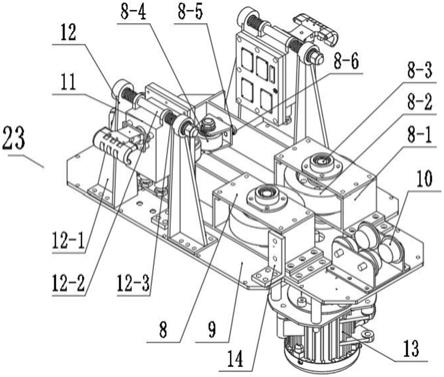
15.图3为本实用新型采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统的驱动机构轴侧图;
16.图4为本实用新型采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统的机器人本体轴侧图;
17.图5为本实用新型采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统整体放大图。
18.图中:1、驱动装置;1
‑
1、驱动电机;1
‑
2、转轮;2、轨道;3、钢丝绳; 4、巷道横梁;5、拖轮组件;6、吊装梁;7、张紧轮;8、驱动轮组件;8
‑
1、轮支架;8
‑
2、主动轮;8
‑
3、主动轴;8
‑
4、从动轮;8
‑
5、调节件;8
‑
6、压簧;9、安装板;10、承重轮组件;11、电动抱索器;12、抱索器滑轨组件; 12
‑
1、滑轨支架;12
‑
2、滑杆;12
‑
3、缓冲弹簧;13、发电机组件;14、固定架;15、语音声光报警器;16、多参数传感器;17、固定摄像头;18、直流稳压电源;19、控制箱;20、烟雾传感器;21、双目云台摄像仪;22、引导轨组件;23、驱动机构;24、机器人本体。
具体实施方式
19.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面
结合具体实施方式,进一步阐述本实用新型。
20.如图1
‑
5所示,采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统,包括引导轨组件22、驱动机构23和机器人本体24,引导轨组件22包括驱动装置1、轨道2、钢丝绳3、巷道横梁4、拖轮组件5、吊装梁6和张紧轮 7,驱动机构23包括驱动轮组件8、安装板9、承重轮组件10、电动抱索器 11、抱索器滑轨组件12、发电机组件13和固定架14,机器人本体24包括有语音声光报警器15、多参数传感器16、固定摄像头17、直流稳压电源18、控制箱19、烟雾传感器20和双目云台摄像仪21。
21.巷道横梁4的数量为两个,轨道2通过吊装梁6固定连接在两个巷道横梁4之间,拖轮组件5固定安装在巷道横梁4的上部。
22.驱动装置1通过驱动电机1
‑
1和转轮1
‑
2组成,驱动电机1
‑
1和张紧轮7 均有支架固定,转轮1
‑
2固定连接在驱动电机1
‑
1的输出轴一端,钢丝绳3 套设在转轮1
‑
2与张紧轮7之间,驱动装置1通过驱动电机1
‑
1带动转轮1
‑
2 转动,从而带动环形钢丝绳3转动,钢丝绳3中间部位由拖轮组件5托住,通过张紧轮7使钢丝绳3张紧。
23.驱动轮组件8通过固定架14对称布置在安装板9的上部两侧,承重轮组件10对称布置在安装板9的上部两侧位于驱动轮组件8的前部位置,电动抱索器11通过抱索器滑轨组件12设置在安装板9的上部靠近边缘位置,发电机组件13固定安装在安装板9的底部。
24.驱动轮组件8由轮支架8
‑
1、主动轮8
‑
2、主动轴8
‑
3、从动轮8
‑
4、调节件8
‑
5和压簧8
‑
6组成,轮支架8
‑
1的数量为两组,其中一组轮支架8
‑
1 固定安装在安装板9的上部,主动轮8
‑
2通过主动轴8
‑
3与其中一组轮支架 8
‑
1转动连接,其中另一组轮支架8
‑
1通过调节件8
‑
5活动连接在安装板9的上部,压簧8
‑
6设置在其中另一组轮支架8
‑
1和调节件8
‑
5之间,从动轮8
‑
4 转动连接在其中另一组轮支架8
‑
1的内侧,一侧主动轴8
‑
3与发电机组件13 输入轴固定连接,另一侧主动轴8
‑
3的底端固定连接有编码器,固定架14固定在安装板9上,通过拧固定架14的六角螺栓来推动驱动轮组件8左右移动,从而可以调节主动轮8
‑
2压在轨道2的腹板上的松紧程度。
25.抱索器滑轨组件12包括滑轨支架12
‑
1、滑杆12
‑
2和缓冲弹簧12
‑
3,滑轨支架12
‑
1固定安装在安装板9的上部靠近边缘位置,滑杆12
‑
2固定连接在滑轨支架12
‑
1的顶部内侧,电动抱索器11滑动连接在滑杆12
‑
2的外部,缓冲弹簧12
‑
3套设在滑杆12
‑
2的外部位于电动抱索器11和滑轨支架12
‑
1 之间位置,电动抱索器11锁紧在钢丝绳3的外部,电动抱索器11在抱索器滑轨组件12上可以实现沿滑杆12
‑
2左右移动,并且设有缓冲弹簧12
‑
3,对驱动机构23的启动或停止起到缓冲作用,电动抱索器11也可沿滑轨12
‑
2旋转,其可对轨道2和钢丝绳3安装的角度误差起到补偿作用。
26.固定摄像头17固定安装在安装板9的底部,多参数传感器16固定安装在安装板9的底部位于固定摄像头17的外侧,直流稳压电源18固定安装在安装板9的底部靠近后方位置,语音声光报警器15固定安装在直流稳压电源 18底部一侧拐角位置,控制箱19固定安装在安装板9的底部位于直流稳压电源18的前部位置,烟雾传感器20固定连接在直流稳压电源18的底部另一侧拐角位置,双目云台摄像仪21固定安装在直流稳压电源18的底部靠近中间位置,直流稳压电源18其控制器具有采集发电机电压、各单体电池的电压、电池组的充电电流、电池组的放电电流、电池组的电压、电池电量带载下容量、总输出功率功能,采用led显示屏显示,控制器可对检测到的发电机输出电压做出判断以做出不同的反应,当检测到发
电机输出电压相对稳定或电压值高于20v可设时,切断电池放电回路充电回路正常,直至充满,由发电机单独给负载供电,当发电机输出电压在一个范围内15v(可设定)
‑
20v(可设定)时,由发电机和电池混合输出给负载供电,当发电机输出电压小于一个值 15v(可设定)时,由电池输出给负载供电,直至发电机供电恢复,其中外接电源和电池供电切换无延时,表现为不间断电源,直流稳压电源18每一路电源输出都可以由rs485通讯单独打开关闭,设置输出优先级,整个电源系统具有单节电池过充电压保护、单节电池过放电压保护、充电过流保护、放电过流保护、输出短路保护、温度保护功能,也可以把采集到的数据通过rs485 进行传输。
27.需要说明的是,本实用新型为采用外部牵引加内部蓄电池供电组合轨道巡检机器人系统,在使用时,驱动装置1通过驱动电机1
‑
1带动转轮1
‑
2转动,从而带动环形钢丝绳3转动,钢丝绳3中间部位由拖轮组件5托住,通过张紧装置使钢丝绳3张紧,电动抱索器11通过电机转动来实现抱索器抓手抓紧或松开牵引钢丝绳3,从而达到驱动机构23及机器人本体24的运动或停止,当机器人运动时可对机器人本体24负载供电及对直流稳压电源18的电池组充电,直流稳压电源18其控制器具有采集发电机电压、各单体电池的电压、电池组的充电电流、电池组的放电电流、电池组的电压、电池电量(带载下容量)、总输出功率功能,控制器可对检测到的发电机输出电压做出判断以做出不同的反应,当检测到发电机输出电压相对稳定或电压值高于20v(可设)时,切断电池放电回路(充电回路正常,直至充满),由发电机单独给负载供电;当发电机输出电压在一个范围内15v(可设定)
‑
20v(可设定)时,由发电机和电池混合输出给负载供电,当发电机输出电压小于一个值15v(可设定) 时,由电池输出给负载供电,直至发电机供电恢复,其中外接电源和电池供电切换无延时,表现为不间断电源,故此巡检机器人可实现连续、长距离巡检。
28.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1