一种基于多目相机协同作业的巡检机器人的制作方法
1.本实用新型主要涉及机器人的技术领域,具体为一种基于多目相机协同作业的巡检机器人。
背景技术:
2.机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械,在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作,理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发,其中传统巡检机器人一般采用双目相机,即高清光学相机和红外热成像仪,但由于相机升降装置下降的限制,无法对更低范围内的设备实现平行拍照。
3.在如今现有的基于多目相机协同作业的巡检机器人中,例如申请文案cn201821087734.8的技术结构中,包括巡检机器人本体,所述巡检机器人本体包括机器人外壳,所述机器人外壳的侧面上固定有l型的固定件,所述固定件上固定有支撑框架,所述支撑框架顶部固定有中间高的锥台形状的顶盖,所述顶盖的垂直投影大于机器人本体的垂直投影,所述顶盖的下边沿高于巡检机器人本体的上顶点,该装置虽然实现了拍摄功能,但是相机的下降功能受到限制,无法对更低范围内的设备实现平行拍照,十分的不方便。
4.基于此,我们需要研制出一种可以在低范围内平行拍照的装置,扩大了拍摄范围,更好的适应了市场的需求,并且结构简单,价格较低。
技术实现要素:
5.本实用新型主要提供了一种基于多目相机协同作业的巡检机器人,用以解决上述背景技术中提出的技术问题。
6.本实用新型解决上述技术问题采用的技术方案为:
7.一种基于多目相机协同作业的巡检机器人,包括机体,所述机体内设置有第一拍摄装置,所述第一拍摄装置包括电机,所述电机的壳体外壁下表面与机体内壁下表面一侧相互连接,所述电机的壳体外壁上表面的接口内设置有驱动轴,所述驱动轴上端设置有丝杆,所述丝杆上设置有螺母座模块,所述螺母座模块外壁一侧设置有连接架,所述连接架下侧设置有减震弹簧,所述减震弹簧远离连接架一端与螺母座模块外壁一侧相互连接,所述连接架远离螺母座模块一端设置有十字形滑块,所述十字形滑块上设置有第一摄像头,所述丝杆上端设置有滑动轴承,所述滑动轴承上端设置有连接轴,所述连接轴上端与机体内壁上表面一侧相互连接。
8.进一步的,所述十字形滑块与十字形滑槽滑动连接,所述十字形滑槽设置在机体外壁一侧。
9.进一步的,靠近所述十字形滑槽一侧设置有液晶显示屏幕,所述液晶显示屏幕设置在机体外壁一侧的凹槽内。
10.进一步的,靠近所述液晶显示屏幕一侧对称设置有超声波避障传感器。
11.进一步的,所述机体外壁上表面一侧的圆孔内设置有紧急停车按钮。
12.进一步的,所述机体外壁上表面另一侧的接口内设置有第二拍摄装置,所述第二拍摄装置包括伸缩杆,所述伸缩杆下端与机体外壁上表面相互连接,所述伸缩杆上端设置有头部旋转俯仰电机,所述头部旋转俯仰电机的壳体外壁一侧设置有第二摄像头,所述头部旋转俯仰电机的壳体外壁另一侧设置有红外热成像仪。
13.进一步的,所述机体外壁下表面设置有机械防撞底板。
14.进一步的,所述机械防撞底板下表面四个顶角位置分别设置有万向轮。
15.与现有技术相比,本实用新型的有益效果为:
16.本实用新型通过第一拍摄装置,实现了可以在低范围内平行拍照,扩大了拍摄范围,更好的适应了市场的需求,并且结构简单,价格较低,通过十字形滑块和十字形滑槽之间的滑动连接,实现了第一摄像头稳定的上下移动,通过紧急停车按钮,实现了对机器人出现故障的时候紧急停止,避免出现更加严重的后果,通过机械防撞底板,实现了对机体外壁的保护,避免机体在移动的过程中,直接装上路障,而是撞到机械防撞底板上。
17.以下将结合附图与具体的实施例对本实用新型进行详细的解释说明。
附图说明
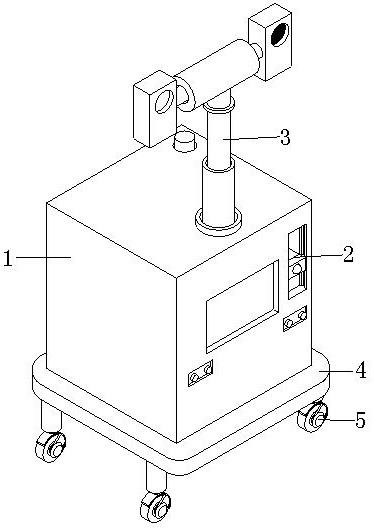
18.图1为本实用新型的整体结构示意图;
19.图2为本实用新型的机体内部截面示意图;
20.图3为本实用新型的机体结构示意图;
21.图4为本实用新型的第二拍摄装置结构示意图。
22.图中:1、机体;11、十字形滑槽;12、液晶显示屏幕;13、超声波避障传感器;14、紧急停车按钮;2、第一拍摄装置;21、电机;211、驱动轴;22、丝杆;23、螺母座模块;231、减震弹簧;24、连接架;25、十字形滑块;26、第一摄像头;27、滑动轴承;28、连接轴;3、第二拍摄装置;31、伸缩杆;32、头部旋转俯仰电机;33、第二摄像头;34、红外热成像仪;4、机械防撞底板;5、万向轮。
具体实施方式
23.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更加全面的描述,附图中给出了本实用新型的若干实施例,但是本实用新型可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本实用新型公开的内容更加透彻全面。
24.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
25.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常连接的含义相同,本文中在本实用新型的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本实用新型,本文所使用的术语“及/或”包括
一个或多个相关的所列项目的任意的和所有的组合。
26.请着重参照附图1
‑
4,一种基于多目相机协同作业的巡检机器人,包括机体1,所述机体1内设置有第一拍摄装置2,所述第一拍摄装置2包括电机21,所述电机21的壳体外壁下表面与机体1内壁下表面一侧相互连接,所述电机21的壳体外壁上表面的接口内设置有驱动轴211,所述驱动轴211上端设置有丝杆22,所述丝杆22上设置有螺母座模块23,所述螺母座模块23外壁一侧设置有连接架24,所述连接架24下侧设置有减震弹簧231,所述减震弹簧231远离连接架24一端与螺母座模块23外壁一侧相互连接,所述连接架24远离螺母座模块23一端设置有十字形滑块25,所述十字形滑块25上设置有第一摄像头26,所述丝杆22上端设置有滑动轴承27,所述滑动轴承27上端设置有连接轴28,所述连接轴28上端与机体1内壁上表面一侧相互连接。
27.请着重参照附图1和附图3,所述十字形滑块25与十字形滑槽11滑动连接,所述十字形滑槽11设置在机体1外壁一侧,通过十字形滑块25和十字形滑槽11之间的滑动连接,实现了第一摄像头26稳定的上下移动,靠近所述十字形滑槽11一侧设置有液晶显示屏幕12,所述液晶显示屏幕12设置在机体1外壁一侧的凹槽内,通过液晶显示屏幕12,实现了对机器人相关数据的显示,靠近所述液晶显示屏幕12一侧对称设置有超声波避障传感器13(型号:ks
‑
us
‑
026),通过超声波避障传感器13,实现了机器人识别路障的功能,所述机体1外壁上表面一侧的圆孔内设置有紧急停车按钮14,通过紧急停车按钮14,实现了对机器人出现故障的时候紧急停止,避免出现更加严重的后果。
28.请着重参照附图1和附图4,所述机体1外壁上表面另一侧的接口内设置有第二拍摄装置3,所述第二拍摄装置3包括伸缩杆31,所述伸缩杆31下端与机体1外壁上表面相互连接,所述伸缩杆31上端设置有头部旋转俯仰电机32,所述头部旋转俯仰电机32的壳体外壁一侧设置有第二摄像头33,所述头部旋转俯仰电机32的壳体外壁另一侧设置有红外热成像仪34(型号:tg165 tg167),所述红外热成像仪34的壳体一侧与头部旋转俯仰电机32的壳体一侧通过转轴转动连接,通过第二拍摄装置3,实现了可以对0.7米以上物体实现可见光拍照和红外测温,所述机体1外壁下表面设置有机械防撞底板4,通过机械防撞底板4,实现了对机体1外壁的保护,避免机体1在移动的过程中,直接装上路障,而是撞到机械防撞底板4上,所述机械防撞底板4下表面四个顶角位置分别设置有万向轮5,通过万向轮5,实现了机体1的移动。
29.本实用新型的具体操作方式如下:
30.首先将装置整体放置在水平地面上,然后检查装置整体内的各个器件是否存在安全隐患,在确保无安全隐患后,机器人启动,第一拍摄装置2开始工作,电机21启动,驱动轴211带动丝杆22转动,从而丝杆22驱动螺母座模块23上下移动,随后通过连接架24带动十字形滑块25在十字形滑槽11内滑动,由于连接架24和螺母座模块23之间的安装有减震弹簧231,使得第一摄像头26在上下移动的过程中比较稳定,避免出现模糊画面,提高拍摄清晰度,实现了在低范围内的平行拍照的功能,可以实现对0.4至0.7米范围内实现可见光拍照,同时第二拍摄装置3内的第二摄像头33和红外热成像仪34开始工作,可以对0.7米以上物体实现可见光拍照和红外测温。
31.上述结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的这种非实质改进,
或未经改进将本实用新型的构思和技术方案直接应用于其他场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1