一种设有缓冲底座的智能机器人的制作方法
1.本实用新型涉及智能机器人的技术领域,尤其涉及一种设有缓冲底座的智能机器人。
背景技术:
2.随着科技的不断发展,智能机器人逐渐普及,越来越多的智能机器人应用在各行各业,为人民的生活与工作提供便利。
3.为了增加智能机器人的应用功能以及提高智能机器人的活动能力,越来越多的生厂商会在智能机器人中增设各种不同的机械部件、电子传感器、自动控制系统以及计算机模块等设备。由于增设的部件越来越多,机器人的重量也随之增加。
4.在增重后,由于增加的重量集中在智能机器人的躯干部分,升高了智能机器人的重心,在进行移动时更容易发生倾倒或返侧的情况,进一步增加了损毁概率。
技术实现要素:
5.本实用新型提出一种设有缓冲底座的智能机器人,所述设有缓冲底座的智能机器人可以改变机器人重心,从而避免倾倒的情况。
6.本实用新型实施例的第一方面提供了一种设有缓冲底座的智能机器人,包括:底座与机器人本体;
7.所述底座的顶部设有固定槽,所述固定槽内设有缓冲组件,所述固定槽的内部设有固定弹簧,所述固定弹簧与所述缓冲组件连接,所述缓冲组件与所述机器人本体连接,在所述机器人本体移动时,所述缓冲组件在所述固定槽移动并与所述固定槽的内壁触碰。
8.在第一方面的一种可能的实现方式中,所述缓冲组件包括:圆形底板和触碰件;
9.所述圆形底板与所述固定弹簧连接,所述圆形底板设有收纳弧,所述收纳弧设有移动槽和定位槽,所述移动槽设有复位弹簧,所述触碰件设有定位柱和移动柱,所述触碰件设置在所述收纳弧内,所述移动柱设置在所述移动槽内,并与所述复位弹簧连接,所述定位柱设置在所述定位槽内。
10.在第一方面的一种可能的实现方式中,所述地标设有四个收纳弧,所述四个收纳弧两两之间以所述圆形底板的圆心对称设置,使所述四个收纳弧呈十字形或星字形。
11.在第一方面的一种可能的实现方式中,所述触碰件设有四个,每个所述触碰件呈圆弧型,且所述触碰件与所述收纳弧大小匹配。
12.在第一方面的一种可能的实现方式中,所述移动槽设有一条,所述定位槽设有两条,所述两条定位槽以所述移动槽为中心对称设置。
13.在第一方面的一种可能的实现方式中,所述圆形底板的中心处设有固定柱,所述固定柱与所述机器人本体连接。
14.在第一方面的一种可能的实现方式中,所述固定槽的顶部设有外壳,所述外壳中间设有通孔,所述固定柱穿过所述通孔。
15.在第一方面的一种可能的实现方式中,所述触碰件的表面和所述底板的表面设有橡胶垫。
16.在第一方面的一种可能的实现方式中,所述圆形底板的底面设有防滑层。
17.在第一方面的一种可能的实现方式中,还包括训练桌,所述底座固定在所述训练桌上。
18.相比于现有技术,本实用新型实施例提供了一种设有缓冲底座的智能机器人,其有益效果在于:本实用新型可以在机器人移动时,产生与机器人移动方向相反的反向作用力,通过反向作用力改变机器人的重心,避免机器人在进行紧急制动或启动时容易发生倾倒或返侧的情况,减少损毁概率,延长使用寿命。
附图说明
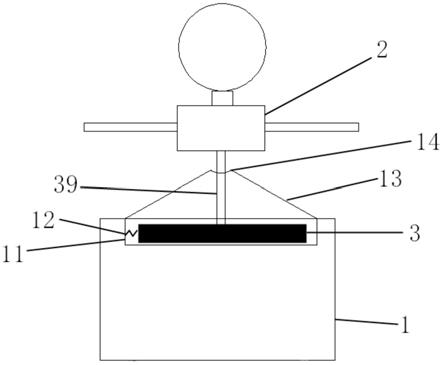
19.图1是本实用新型一实施例提供的一种设有缓冲底座的智能机器人的结构示意图;
20.图2是本实用新型一实施例提供的一种缓冲组件的结构示意图;
21.图3是本实用新型一实施例提供的一种训练桌的结构示意图。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.目前常见的智能机器人,其重量主要集中在智能机器人的躯干部分,从而升高了智能机器人的重心,在进行紧急制动时更容易发生倾倒或返侧的情况,增加损毁概率。
24.为了解决上述问题,下面将通过以下具体的实施例对本技术实施例提供的一种设有缓冲底座的智能机器人进行详细介绍和说明。
25.参照图1-2,分别示出了本实用新型一实施例提供的一种设有缓冲底座的智能机器人的结构示意图和本实用新型一实施例提供的一种缓冲组件的结构示意图。在本实施例中,底座1与机器人本体2。
26.在所述底座1的顶部设有固定槽11,所述固定槽11内设有缓冲组件3,所述固定槽11的内部设有固定弹簧12,所述固定弹簧12与所述缓冲组件3连接,所述缓冲组件3与所述机器人本体2连接,在所述机器人本体2的启动或制动时,所述缓冲组件3在所述固定槽11移动并与所述固定槽11的内壁触碰。
27.具体地,当机器人本体2需要启动向左转或向左移动时,在惯性作用下缓冲组件3带动机器人本体2向右移动,将机器人本体2的重心可能从起始位置向右靠。而由于固定槽11通过固定弹簧12与缓冲组件3连接,在缓冲组件3移动时,固定弹簧12拉伸形成反向作用力拉着缓冲组件3和机器人本体2,将机器人本体2的重心从当前位置向左拉,避免机器人本体2在惯性作用下发生倾倒的情况,而且缓冲组件3可以缓冲机器人本体2在移动时产生的作用力,提高机器人本体2的稳定性。
28.同理,在机器人本体2需要制动时,在惯性作用下缓冲组件3带动机器人本体2向前
移动,将机器人本体2的重心可能从起始位置向前倾。而由于固定槽11通过固定弹簧12与缓冲组件3连接,在缓冲组件3移动时,固定弹簧12拉伸形成反向作用力拉着缓冲组件3和机器人本体2,将机器人本体2的重心从当前位置向后拉,从而也可以避免机器人本体2在惯性作用下发生倾倒的情况。
29.为了提高缓冲组件3的缓冲能力以及在移动后的复位能力,提供所述缓冲组件3包括:圆形底板31和触碰件32。
30.所述圆形底板31与所述固定弹簧12连接,所述圆形底板31设有收纳弧33,所述收纳弧33设有移动槽34和定位槽35,所述移动槽34设有复位弹簧36,所述触碰件32设有定位柱37和移动柱38,所述触碰件32设置在所述收纳弧33内,所述移动柱38设置在所述移动槽34内,并与所述复位弹簧36连接,所述定位柱37设置在所述定位槽35内。
31.当机器人本体2启动或制动时,圆形底板31随机器人本体2移动,其中一个圆形底板31拉伸固定弹簧12,且定位柱37与移动柱38分别插入定位槽35与移动槽34中,使得移动槽34再压缩复位弹簧36,使得复位弹簧36和固定弹簧12同时产生与圆形底板31移动方向相反的作用力,从而同时拉着机器人本体2与圆形底板31,实现改变机器人本体2的重心的效果。
32.由于机器人的移动方向有多个,为了能满足不同方向的移动要求,参照图1-2,所述地标设有四个收纳弧33,所述四个收纳弧33两两之间以所述圆形底板31的圆心对称设置,使所述四个收纳弧33呈十字形或星字形。
33.在实际操作中,当机器人本体2向前移动时,圆形底板31在惯性的作用下向后移动,圆形底板31挤压在后相连的固定弹簧12,且拉伸在前的固定弹簧12,使得在前与在后的固定弹簧12同时形成与圆形底板31移动方向相反向的作用力,拉动圆形底板31,同时触碰件32与固定槽11的内壁触碰,使得触碰件32的移动柱38压缩移动槽34内的复位弹簧36,让复位弹簧36可以同时产生与圆形底板31移动方向相反的作用力。
34.通过多个反向作用力,可以改变机器人本体2的重心,从而可以避免机器人本体2在惯性作用下发生倾倒的情况。
35.为了避免触碰件32与固定槽11的内壁触碰时,触碰件32与圆形底板31发生碰撞,参照图1-2,所述触碰件32设有四个,每个所述触碰件32呈圆弧型,且所述触碰件32与所述收纳弧33大小匹配。
36.让触碰件32与圆弧型尽可能地吻合,可以让触碰件32与圆心底板更有效的匹配工作。
37.在实际使用中,为了引导移动柱38往移动槽34的方向移动,使得移动槽34可以更加准确地压缩复位弹簧36,参照图1-2,所述移动槽34设有一条,所述定位槽35设有两条,所述两条定位槽35以所述移动槽34为中心对称设置。
38.通过设定两条定位槽35,并由两条定位槽35夹着移动槽34,在每次移动时,可以更快更准确地让移动柱38在移动槽34中来回移动。
39.为了能让机器人本体2与圆形底板31可以同步移动,在所述圆形底板31的中心处设有固定柱39,所述固定柱39与所述机器人本体2连接。
40.参照图1-2,在移动过程中,为了避免缓冲组件3从固定槽11中掉落,在所述固定槽11的顶部设有外壳13,所述外壳13中间设有通孔14,所述固定柱39穿过所述通孔14与机器
人本体2连接。
41.在圆形底板31移动的过程中,触碰件32可能与固定槽11内壁进行碰撞,为了降低因碰撞产生的机件损毁概率,在所述触碰件32的表面设有橡胶垫。
42.为了能进一步增加圆形底板31的摩擦力,让圆形底板31可以产生与圆形底板31移动方向相反的作用力,在所述圆形底板31的底面设有防滑层。
43.防滑层可以采用高纤维的尼龙或麻布。
44.参照图3,示出了本实用新型一实施例提供的一种训练桌的结构示意图,在实际操作中,为了方便机器人本体与用户进行交流以及方便机器人本体采集用户的数据,在本实施例中,还包括训练桌4,所述底座1固定在所述训练桌4上。用户可以坐在训练桌4旁与机器人本体2互动交流,同时机器人本体2可以在训练桌4来回转动,缓冲组件3可以缓冲机器人本体2转动过程中的作用力,使得机器人本体2在训练桌4上固定得更加稳定。
45.在本实施例中,本实用新型实施例提供了一种设有缓冲底座的智能机器人,其有益效果在于:本实用新型可以在机器人移动时,产生与机器人启动方向或制动方向相反的反向作用力,通过反向作用力改变机器人的重心,避免机器人在移动时容易发生倾倒或返侧的情况,减少损毁概率,延长使用寿命。
46.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1