一种可实现多机器人控制的实验系统的制作方法
1.本实用新型涉及机器人控制技术领域,尤其涉及一种可实现多机器人控制的实验系统。
背景技术:
2.移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统,在自然界中的众多生物群体中,如蚂蚁、蜜蜂、鸟群、鱼群等,这些群居性生物以相互合作为其生存策略,群体中每个个体仅执行一项或有限的几项简单的动作,所组成群体能够极有效率地行动,因此,多机器人系统能够降低单个机器人的设计复杂度,通过多机器人相互协调与合作能够完成复杂的作业任务,也是目前机器人技术研究的热点之一。
3.多机器人系统一般要求具备全局定位功能,以保证控制算法验证的效果,而目前的三维室内定位系统通常较为复杂,并且造价较高,因此,亟待提出一种通信方式可调整、具备三维定位功能、机器人结构简单、整体造价低廉的多机器人实验系统。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种可实现多机器人控制的实验系统。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种可实现多机器人控制的实验系统,包括底板,所述底板的上表面固定连接有工作台,工作台的上表面设有工作站,所述底板的上表面固定连接有围栏,围栏内设有多个移动机器人,所述底板的上表面固定连接有视觉支架,视觉支架的顶部固定连接有三维相机,所述移动机器人包括第一固定板,第一固定板的上表面固定连接有两个固定块,固定块的顶部固定连接有第二固定板,第二固定板的上表面固定连接有多个铜柱,第一铜柱的一侧固定连接有控制板,所述控制板的底部固定连接有数据接口、单片机、无线通讯模块和驱动器,所述第一铜柱的顶部固定连接有定位板,所述第一固定板的底部固定连接有驱动底座,所述第一固定板的上表面固定连接有两个驱动电池,且驱动电池与驱动底座电性连接。
7.作为本实用新型再进一步的方案,所述定位板的上表面固定连接有第一标签,第一标签内设有第一圆心点,所述定位板的上表面固定连接有第二标签,第二标签的内设有第二圆心点。
8.作为本实用新型再进一步的方案,所述第二固定板的圆周一侧固定连接有多个超声传感器。
9.作为本实用新型再进一步的方案,所述第一固定板的圆周一侧固定连接有多个第一红外传感器。
10.作为本实用新型再进一步的方案,所述第一固定板的底部固定连接有安装板,安装板的底部固定连接有第二红外传感器。
11.作为本实用新型再进一步的方案,所述第一标签和第二标签为圆形,且颜色和大小均不同。
12.作为本实用新型再进一步的方案,所述工作站和三维相机之间信号连接。
13.作为本实用新型再进一步的方案,所述第一固定板、第二固定板和控制板均为印刷电路板。
14.本实用新型的有益效果为:
15.1.通过工作站和无线通讯模块的配合使用,使得系统在进行运行时能够实现集中控制式通讯模式或分布控制式通讯模式等模式的切换,提高了系统运行的多样性。
16.2.通过三维相机和定位板的配合使用,使得系统在运行时能够通过位置和方向识别算法计算移动机器人的三维位置和行进方向,使得系统具备三维定位功能。
17.3.通过超声传感器、第一红外传感器和第二红外传感器的配合使用,使得移动机器人在进行移动时能够避免各个方位的障碍物对移动机器人的行走造成影响,提高移动机器人移动的安全性。
附图说明
18.图1为本实用新型提出的一种可实现多机器人控制的实验系统的主视结构示意图;
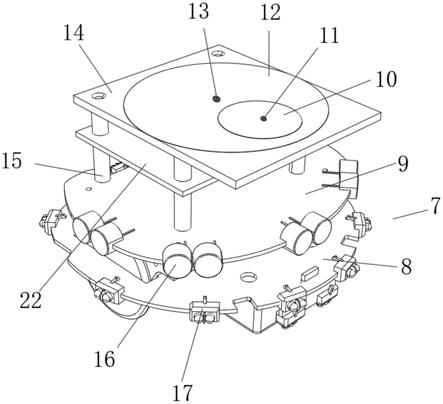
19.图2为本实用新型提出的一种可实现多机器人控制的实验系统的移动机器人主视结构示意图;
20.图3为本实用新型提出的一种可实现多机器人控制的实验系统的移动机器人仰视结构示意图。
21.图中:1、底板;2、工作台;3、工作站;4、视觉支架;5、三维相机;6、围栏;7、移动机器人;8、第一固定板;801、固定块;9、第二固定板;10、第一标签;11、第一圆心点;12、第二标签;13、第二圆心点;14、定位板;15、铜柱;16、超声传感器;17、第一红外传感器;18、驱动底座;19、驱动电池;20、第二红外传感器;21、安装板;22、控制板;23、数据接口;24、单片机;25、无线通讯模块;26、驱动器。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”、“设置”应做广义理解,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
23.参照图1
‑
图3,一种可实现多机器人控制的实验系统,包括底板1,底板1的上表面通过螺栓固定有工作台2,工作台2的上表面设有工作站3,通过工作站3能够对系统进行控制和计算,底板1的上表面通过螺栓固定有围栏6,围栏6能够对移动机器人7进行限位,围栏6内设有多个移动机器人7,根据实际需要,可改变移动机器人7的数量,底板1的上表面通过螺栓固定有视觉支架4,视觉支架4的顶部通过螺栓固定有三维相机5,三维相机5的视场角能够覆盖整个围栏6,移动机器人7包括第一固定板8,第一固定板8的上表面通过螺栓固定
有两个固定块801,固定块801的顶部通过螺栓固定有第二固定板9,第二固定板9的上表面通过螺栓固定有多个铜柱15,第一铜柱15的一侧通过螺栓固定有控制板22,控制板22的底部焊接有数据接口23、单片机24、无线通讯模块25和驱动器26,工作站3能够通过移动机器人7内的无线通讯模块25对移动机器人7进行控制,并通过无线通讯模块25进行切换对移动机器人7的控制方式,第一铜柱15的顶部通过螺栓固定有定位板14,定位板14使得系统在运行时能够通过其位置和方向识别算法计算移动机器人7的三维位置和行进方向,第一固定板8的底部通过螺栓固定有驱动底座18,第一固定板8的上表面通过螺栓固定有两个驱动电池19,且驱动电池19与驱动底座18电性连接,通过驱动电池19对驱动底座18进行驱动,无须外置电源。
24.本实用新型中,需要说明的是,定位板14的上表面粘接有第一标签10,第一标签10内设有第一圆心点11,定位板14的上表面粘接有第二标签12,第二标签12的内设有第二圆心点13,第一圆心点11和第二圆心点13连线为移动机器人7的前进方向,第二固定板9的圆周一侧焊接有多个超声传感器16,超声传感器16能够检测移动机器人7左、前、右三个方向的障碍物,第一固定板8的圆周一侧焊接有多个第一红外传感器17,第一红外传感器17能够检测移动机器人7前、后、左、右四个方向的障碍物,第一固定板8的底部通过螺栓固定有安装板21,安装板21的底部焊接有第二红外传感器20,第二红外传感器20则对底侧进行巡线检测,第一标签10和第二标签12为圆形,且颜色和大小均不同,工作站3和三维相机5之间信号连接,第一固定板8、第二固定板9和控制板22均为印刷电路板。
25.工作原理:使用时,三维相机5固定在视觉支架4上,使三维相机5的视场角能够覆盖整个围栏6和围栏6内的移动机器人7,然后将工作站3通过usb与三维相机5进行连接,方便工作站3对三维相机5的数据进行采集,然后根据实际需要数量要求,将对应数量的移动机器人7放至围栏6中,然后工作站3通过移动机器人7内的无线通讯模块25对移动机器人7进行控制,并通过无线通讯模块25进行切换对移动机器人7的控制方式,同时超声传感器16检测左、前、右三个方向的障碍物,第一红外传感器17检测前、后、左、右四个方向的障碍物,而第二红外传感器20则对底侧进行巡线检测,同时第一标签10和第二标签12中的第一圆心点11和第二圆心点13连线为移动机器人7的前进方向,工作站3对三维相机5进行数据采集,根据图像处理算法,获取第二标签12中的第二圆心点13坐标和第一标签10的第一圆心点11坐标,进而可以计算出移动机器人7的三维位置和行进方向。
26.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1