一种机器人多模态信息监控交互平台的制作方法
1.本实用新型属于机器人加工监控交互平台技术领域,具体涉及一种机器人多模态信息监控交互平台。
背景技术:
2.随着机器人技术和智能制造的逐步发展,机器人的应用场景逐渐从相对单一的制造场景向多种混合型场景不断变化,这使得整个过程中需要注意的外界环境信息种类更加多样。同时,制造业开始从基于经验的决策向基于证据的决策过渡,从解决可见的问题到避免不可见的问题转变,从基于控制的机器学习向基于丰富数据的深度学习发展,而这些转变都需要人们对于多种多样的信息数据进行很好的融合和处理,通过这些数据进行决策和分析,从而做出更好的决策和反应。所以,如何利用多种不同传感器数据进行整合,实现一个完整的多模态信息监控交互平台是未来制造技术的重点挑战。
3.目前,大多数加工作业主要通过单一传感器反馈的数据进行控制或者补偿,而单一传感器难以提供一些复杂场景下机器人的精细操作所需的数据信息,因此多模态信息的引入为机器人各种场景下的精细加工创造了可能。对于机器人系统而言,所采集到的多模态信息具有一些明显特点,为后续的控制工作带来了巨大的挑战。这些问题主要是:(1)机器人的操作环境通常非常复杂,因此采集到的数据通常具有很多的噪声和野点。(2)机器人总是在动态环境下工作,采集到的多模态数据必然具有复杂的动态特性。(3)机器人携带的传感器工作频带、使用周期具有很大差异,导致各个模态之间的数据难以“配对”。
4.机器人是一个复杂的系统,开展机器人多模态融合感知需要综合考虑任务特性、环境特性和传感器特性。尽管人们已经充分认识到多模态信息在机器人系统上的应用,国内很多相关机构,如东南大学、北京航空航天大学等都在这方面展开了许多研究工作,但目前多模态信息的融合和处理仍然存在很大的发展空间。将传感器信息更好地融合和处理,从而指导机器人的加工作业是未来机器人应用中十分重要的内容。
5.随着机器人技术的发展,工业机器人的瓶颈逐渐向应用端转移。在装配、涂料、磨抛等力觉触控任务的应用场景,要求机器人具有对接触力的感知和控制能力,接触的存在使得精确的动态仿真难以实现。传统的离线编程方式要求明确地指定机器人的运动,并且要求工件一致性好、有较高的安装精度和建模精度,复杂曲面示教困难且路径精度低。整个加工过程缺乏环境的感知和加工过程监控,无法有效跟踪加工精度及控制加工精度。如何有效提高工业机器人在实际应用场景中的加工精度成为了一个热门内容。
技术实现要素:
6.鉴于现有技术的不足,本实用新型的目的在于提供一种机器人多模态信息监控交互平台,以解决加工过程中缺乏加工过程监控导致加工精度较低的问题。
7.为实现上述目的,本实用新型采用如下技术方案:一种机器人多模态信息监控交互平台,包括:
8.工作台,其设置有工装夹具,用于定位工件;
9.工业机器人,其设置在工作台的旁边,用于对所述工件执行作业任务;所述工业机器人包括机器人本体、末端执行器和机器人控制器,所述末端执行器安装在所述机器人本体的末端,所述末端执行器和机器人本体的驱动机构均电性连接至机器人控制器;
10.力觉传感器,其固定在所述末端执行器上,用于测量所述末端执行器作业时与所述工件之间的接触力;
11.噪声传感器,其安装在所述工装夹具上,用于测量作业时产生的噪声;
12.温度传感器,其安装在所述工装夹具上,用于测量作业时所述工件的温度;
13.视觉传感器,其安装在所述工作台的旁边,用于监控所述工业机器人的动作路径;
14.下位机,其与所述机器人控制器、所述力觉传感器、所述噪声传感器、所述温度传感器、所述视觉传感器电性连接,用于现场控制。
15.优选地,所述机器人多模态信息监控交互平台还包括测力传感器,所述测力传感器安装在工作台的底部。
16.优选地,所述力觉传感器采用六轴力矩传感器。
17.优选地,所述视觉传感器固定在立架上,所述立架设置在工作台的旁边。
18.优选地,所述工业机器人为关节机械手臂。
19.优选地,所述视觉传感器包括照相机或摄像机。
20.优选地,所述下位机通过ethercat高速实时总线分别连接所述机器人控制器、所述力觉传感器、所述噪声传感器、所述温度传感器。
21.优选地,所述下位机设置有ethernet/ip接口,所述ethernet/ip接口连接所述力觉传感器。
22.优选地,所述下位机通过以太网与上位机通信连接。
23.与现有技术相比,本实用新型具有以下有益效果:该机器人多模态信息监控交互平台设置了多种不同传感器,通过多个传感器的相互配合实现加工过程监控,通过多种不同传感器数据的融合为整个加工过程提供不同的补偿信息,从而进一步提高加工精度;多模态数据可以获得更加全面准确的信息,有效增强信息采集的可靠性和容错性,为机器人实现更高效的决策提供了新的思路和基础;该机器人多模态信息监控交互平台几乎不受加工方式、加工材料和加工形状等的变化影响,通过该平台进行相关作业比起传统加工平台的加工精度有明显提升,且整个过程更加可控,实用性和稳定性更好。
附图说明
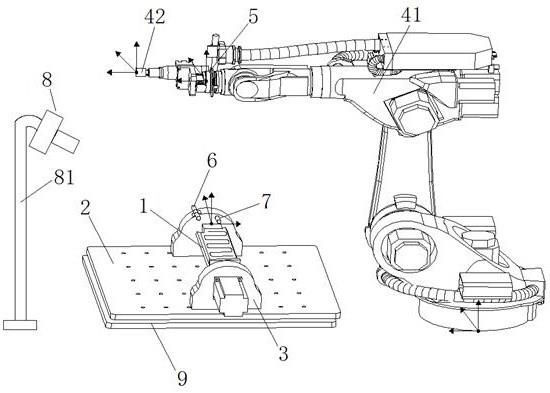
24.图1为本实用新型实施例的结构示意图。
25.图中标记:1、工件;2、工作台;3、工装夹具;4、工业机器人;41、机器人本体;42、末端执行器;5、力觉传感器;6、噪声传感器;7、温度传感器;8、视觉传感器;81、立架;9、测力传感器。
具体实施方式
26.为了让本实用新型的上述特征和优点更明显易懂,下面特举实施例,并配合附图,作详细说明如下。
27.如图1所示,本实施例提供了一种机器人多模态信息监控交互平台,包括:
28.工作台2,其设置有工装夹具3,用于定位工件1;
29.工业机器人4,其设置在工作台2的旁边,用于对所述工件1执行作业任务;所述工业机器人4包括机器人本体41、末端执行器42和机器人控制器,所述末端执行器42安装在所述机器人本体41的末端,所述末端执行器42和机器人本体41的驱动机构均电性连接至机器人控制器;
30.力觉传感器5,其固定在所述末端执行器42上,用于测量所述末端执行器42作业时与所述工件1之间的接触力;
31.噪声传感器6,其安装在所述工装夹具3上,用于测量作业时产生的噪声;
32.温度传感器7,其安装在所述工装夹具3上,用于测量作业时所述工件1的温度;
33.视觉传感器8,其安装在所述工作台2的旁边,用于监控所述工业机器人4的动作路径;
34.下位机,其与所述机器人控制器、所述力觉传感器5、所述噪声传感器6、所述温度传感器7、所述视觉传感器8电性连接,用于现场控制。
35.在本实施例中,所述机器人多模态信息监控交互平台还包括测力传感器9(如测力仪),所述测力传感器9安装在工作台2的底部,用于测量工件1的重量。
36.在本实施例中,所述力觉传感器5优先采用六轴力矩传感器,如美国ati工业自动化有限公司的delta ip60传感器。
37.在本实施例中,所述视觉传感器8固定在立架81上,所述立架81设置在工作台2的旁边。
38.在本实施例中,所述工业机器人4优选为关节机械手臂。
39.在本实施例中,所述视觉传感器8包括照相机或摄像机。
40.在本实施例中,所述下位机通过ethercat高速实时总线分别连接所述机器人控制器、所述力觉传感器5、所述噪声传感器6、所述温度传感器7,有利于解决机器人与多个传感器通信与同步的问题,与传统控制架构相比,解决了信号识别和机器人控制的实时性和稳定性问题。
41.在本实施例中,所述下位机设置有ethernet/ip接口,所述ethernet/ip接口连接所述力觉传感器5,通过ethernet/ip接口使得力觉传感器5的输出速率高达7000 hz。
42.在本实施例中,所述下位机通过以太网与上位机通信连接。
43.本实施例的工作原理如下:通过工装夹具3将待加工的工件1固定在工作台2上,通过工业机器人4对工件1进行加工(如装配、涂料、磨抛等),通过力觉传感器5、噪声传感器6、温度传感器7、视觉传感器8等传感器采集工业机器人4作业时产生的各种信息,进而利用各种不同传感器提供的信息进行整合划分,通过位置、力觉、温度、噪声等多模态信息监控机器人与环境交互状态,可跟踪加工质量。例如,通过力觉传感器5的返回数据,判断加工的状态,从而进行接触过程中力觉传感器5重力补偿和振动力补偿,提高力控制的鲁棒性;利用视觉传感器8的实时性、非接触等优点,通过高精度视觉解决方案提高了加工过程的精度。
44.特别需要说明的是,上述的机器人控制器、力觉传感器5、噪声传感器6、温度传感器7、视觉传感器8、下位机、上位机等硬件均可以采用现有成熟产品,具体型号不限。例如,所述下位机可以采用现有的单片机、plc等,具体如西门子s7系列plc;所述上位机可以采用
现有的工控机、pc等计算机。
45.以上所述,仅为本实用新型的较佳实施例,并非对本实用新型做任何形式上的限制,任何熟悉本领域的技术人员但凡未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所做任何简单的修改、均等变化与修饰,皆应属本实用新型的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1