一种可监控扭矩和转角的套筒扳手智能转换接头的制作方法
1.本实用新型涉及一种可监控扭矩和转角的套筒扳手智能转换接头,采用该智能转换接头可以实现手动施扭过程中对扭矩和转角的检测和控制。
背景技术:
2.螺纹联接被广泛应用各种机械结构中,是目前最常用的连接方式。螺纹联接的实质是通过将轴向预紧力(夹紧力)控制到适当范围,将两个或多个部件可靠的联接在一起,因此轴向预紧力是评价螺纹联接可靠性的重要指标。由于轴向预紧力是内力,目前还无法直接控制预紧力来装配螺纹联接,只能通过控制与其相关的参数:如扭矩法、扭矩
‑
转角法、螺栓屈服点法、螺栓伸长量法等,达到间接控制预紧力的目的。其中扭矩法和扭矩
‑
转角法是目前螺纹副施扭工艺中的主要方法。
3.扭矩法是应用最广的螺纹副紧固方法,是采用手动或电动等静扭扳手以一定角速率均匀地将螺纹副施扭到规定扭矩,该方法的影响因素较多,扭矩控制精度较差,优点是工具简单,操作方便。扭矩
‑
转角法是先将螺纹副施扭到一个较小的初始扭矩(贴合扭矩),再从此点开始施扭规定角度的施扭控制方法。该方法最大限度地消除了各种与摩擦系数有关的影响因素并可充分利用螺栓的承载能力,达到准确控制预紧力的目的,缺点是可采用的施扭工具较少。
4.装配线上使用的电动拧紧轴是目前最先进的拧紧工具,具有拧紧精度高,拧紧质量稳定,螺纹副相关摩擦系数对拧紧质量的影响小等优点,其缺点是:价格很高,控制系统复杂,无法便携式使用等。常用的数字式扭矩扳手是在扳手杆上作用力点敏感位置设置应变式测力传感器,得到施扭中的扭矩,经电子检测、数字运算将扭矩实时显示在液晶屏幕上,并可显示和保存扭矩峰值,精度较高,但不能对施扭扭矩在线监测,也不能进行施扭转角检测和控制。且由于被施扭螺纹副与扭矩检测不在同一中心轴线上,施力位置、用力方向和施扭平稳程度受人为因素影响较大,不易保证施扭质量。
5.中国发明专利201610566046.9公开了一种智能扭矩套筒,在套筒上设置扭矩传感器、模数转换器和单片机,有效实现了套筒自动组网、无线传输等功能,同时还可以数字显示和存储数据。其不足之处是一种套筒只能施扭一种螺母/螺栓,使用成本较高,且无转角检测和控制以及灯光指示和声音提示功能,功能单一。
6.螺纹副施扭作业中, 经常用到一种套筒扳手转换接头,其上部的驱动方孔连接施扭板杆上的方榫,下部的方榫与标准套筒的方孔相连,用于改变方孔和方榫尺寸以适应对不同规格螺纹副施扭,目前尚没有可监控扭矩和转角的套筒扳手智能转换接头,用于手动扳手的扭矩和转角监控。因此,通过一种转换工具,以一定的角速率平稳地且一次性将螺纹副施扭到位,得到一个精准的扭矩和转角值,实现按扭矩法和扭矩
‑
转角法施扭工艺施扭,对螺纹副装配来讲,无疑是极为方便和必要的。
技术实现要素:
7.本实用新型针对现有技术不足,提出一种可监控扭矩和转角的套筒扳手智能转换接头,以智能转换接头形式,实现了手动施扭操作过程中扭矩和转角的实时检测和精确控制。
8.本实用新型采用的技术方案是:
9.在智能转换接头本体中间部位的外壳内设置有应变式扭矩传感器、微电子检测电路板和锂电池,在靠近输出方榫上部设置有转角传感器;所述的智能转换接头体上部的驱动方孔、下部的输出方榫与应变式扭矩传感器及转角传感器处于同一中心轴线上。
10.所述微电子检测电路板上包含:内含a/d转换器、数据运算单元、非易失数据存储器、液晶显示驱动器、多种串行接口的微处理器,扭矩和转角信号调理电路,液晶显示器,充电及电源管理电路,无线通讯模块,指示灯及其驱动电路,喇叭及其驱动电路等部分。
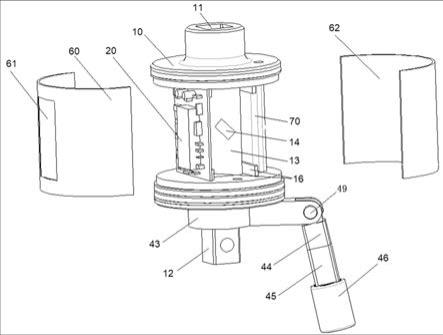
11.具体的,所述可监控扭矩和转角的套筒扳手智能转换接头,包括转换接头本体(10),所述转换接头本体(10)上端设有驱动方孔(11),下端设有输出方榫(12),中间部分为柱体结构的弹性体(13),在所述柱体结构的弹性体(13)上与其中心轴线成45度角方向均匀设置有多片应变片(14),所述应变片组成测量电桥,构成与转换接头本体(10)一体的扭矩传感器(15),在所述转换接头本体(10)的下部与旋转臂(43)配合设有编码器式转角传感器(40);所述转换接头本体(10)的两圆盘内侧通过固定架(16)固定有微电子检测电路板(20)及锂电池(70)。所述驱动方孔(11)、输出方榫(12)、扭矩传感器(15)及转角传感器(40)处于同一中心轴线上。通过转换接头本体两圆盘,与其匹配设有非金属密封外壳(60,62),所述非金属密封壳上面和微电子检测电路的液晶显示器(24)对应位置设置有透明显示窗(61),与喇叭对应位置设置有网状传声孔。
12.进一步的,所述编码器式转角传感器(40)设置于转换接头本体(10)下部输出方榫(12)的上方,包括码盘(41)和读码器(42),所述读码器(42)与码盘(41)配合设置于转换接头本体(10)下部的盒体内,读码器(42)固定于盒体的内壁,盒体下端敞口,并设有封盖(48)。码盘(41)与旋转臂(43)相固定并可沿智能转换接头本体(10)中心轴线呈360
°
转动,所述旋转臂(43)通过销轴(49)与上支撑臂(44)连接,上支撑臂(44)与中支撑臂(45)固定连接,中支撑臂(45)与下支撑臂(47)固定连接,下支撑臂(47)外套有软橡胶外套(46);中支撑臂(45)为绝缘柔性材质,下支撑臂(47)为强磁体材质,目的是将下支撑臂与金属支撑件可靠固定,通过编码器式转角传感器(40)采集的转角值准确可靠。
13.所述的微电子检测电路(20)包括微处理器(21),液晶显示器(24),无线通讯模块(28),扭矩指示灯(33)、转角指示灯(34)和角速率指示灯(35)以及指示灯驱动电路(22),喇叭(36)以及喇叭驱动模块(23),充电及电源管理电路(26);扭矩传感器(15) 输出的电压信号经扭矩信号调理电路(27)接入微处理器(21),转角传感器(40)输出的脉冲信号经转角信号调理电路(25)接入微处理器(21);微处理器(21) 通过i/0口经指示灯驱动电路(22)分别驱动扭矩指示灯(33)、转角指示灯(34)和角速率指示灯(35)进行操作指示,微处理器(21)还通过i/0口经喇叭驱动模块(23)驱动喇叭(36)进行操作过程的语音提示。
14.进一步的,所述扭矩指示灯(33)、转角指示灯(34)和角速率指示灯(35)为镶嵌于智能转换接头本体(10)上下侧的光导纤维灯环,所述灯环由指示灯驱动电路(22)驱动,微处理器(21)根据扭矩、转角和角速率值可控制其发出不同颜色的环状光线。
15.微处理器(21)内部的液晶驱动器连接液晶显示器(24),用于显示正反方向的扭矩值和转角值以及保持显示其峰值,还显示扭矩初始值,扭矩合格值和转角合格值及其范围等控扭参数,以及电池剩余电量信息和无线连接状态等信息。
16.进一步的,所述喇叭驱动模块(23)包括预先录制了多段相关语音的语音芯片和放大电路,施扭过程中,微处理器(21)实时采集计算扭矩、转角和角速率值,并与预置的各项控扭参数动态比较和逻辑判断,进行相应的语音提示。
17.进一步的,所述微电子检测电路(20)还包括无线通讯模块(28),与微处理器(21)的串行口连接,所述无线通讯模块(28)是一款基于lora扩频技术的物联网无线收发器,与上位机(50)无线通讯,使本智能转换接头作为物联网的一个节点融入监控网络中,进行相关扭矩、转角等控制参数和工作状态、作业扭矩数据等信息的互传。所述上位机(50)为安装有相应app软件的便携式智能终端,或设置在施扭作业现场且处于监控网络中工控机。
18.所述充电及电源管理电路(26)由锂电池电量计和多个可控低压差稳压器(ldo)或专用电源管理器及其外围电路组成,与微处理器(21)的i2c接口和i/o口连接。所述电量计实时监测锂电池充放电状态下的电压、电流和温度,并准确计算锂电池的剩余电量,剩余电量信息由液晶显示器(24)显示;锂电池(70)的输出电源连接可控低压差稳压器或电源管理器的输入端,输出端分别连接耗电量较多的扭矩传感器(15)、转角传感器(40)、无线通讯模块(28)以及液晶显示器(24)的背光驱动等部分。
19.微处理器(21)实时检测本智能智能转换接头的工作情况,一定时间内不工作时,微处理器通过i/o口可分别关闭耗电量较多的扭矩传感器(15),转角传感器(40),无线通讯模块(28),液晶显示器(24)的背光驱动器等部分,随后微处理器(21)进入极低功耗的休眠状态以延长电池使用时间。进入休眠状态的微处理器(21)可通过施加一定扭矩或上位机唤醒。
20.实用新型有益效果:
21.1.本实用新型可监控扭矩和转角的套筒扳手智能转换接头,通过在智能转换接头本体上设置驱动方孔、输出方榫、扭矩传感器和转角传感器,且处于同一中心轴线上,有效地减少了操作人员的人为因素对扭矩检测和控制精度的影响。
22.2.根据具体紧固施扭工艺和作业标准灵活预设相关控扭参数,实时检测计算扭矩、转角和施扭角速率,并与预设值进行动态比较和逻辑判断,通过数字显示、灯光指示和语音提示方法,引导操作者对施扭过程中的扭矩和转角精确控制,并可自动检测螺纹副的滑丝和乱扣等缺陷以及施扭操作的不当之处,提高了螺纹副紧固作业合格率以及作业效率。
23.3.采用lora强抗干扰无线通讯技术,使本智能转换接头作为物联网的一个节点融入监控网络中,在作业现场强电磁干扰环境下,进行相关控扭参数的灵活预置以及工作状态和作业扭矩数据等信息的可靠传输,实现了螺纹副施扭作业的全过程监控以及作业数据的可追溯,符合物联网和大数据时代对作业工具提出的新要求。
附图说明
24.图1是智能转换接头结构示意图;
25.图2是智能转换接头结构剖视图;
26.图3是微电子检测电路原理框图;
27.图4是多种工作模式控制流程图;
28.图5是智能转换接头使用状态示意图。
具体实施方式
29.下面通过具体实施方式,结合附图对本发明技术方案做进一步的详细描述。
30.实施例1
31.如图1、图2所示,本实用新型可监控扭矩和转角的套筒扳手智能转换接头,包括转换接头本体10,所述转换接头本体10上端为驱动方孔11,下端为输出方榫12,中间部分为柱体结构的弹性体13,在所述柱体结构的弹性体13的扭矩最敏感部位,且与其中心轴线成45度角方向均匀设置有应变片14,这些应变片组成测量电桥并构成与转换接头本体10一体化的应变式扭矩传感器15;在转换接头本体10的下部与旋转臂43配合设有编码器式转角传感器40;并且,在所述智能转换接头本体10的两圆盘内侧通过固定架16固定有微电子检测电路板20及锂电池70,所述扭矩传感器15及编码器式转角传感器40输出信号连接所述微电子检测电路20,以实现扭矩、转角信号的检测。
32.通过智能转换接头本体10的上下两圆盘,与其匹配设有非金属密封前外壳60,后外壳62,所述非金属密封外壳与微电子检测电路的液晶显示器24对应位置设置有透明显示窗61,与喇叭对应位置设置有网状传声孔。
33.实施例2
34.如图2所示,本实施例的可监控扭矩和转角的套筒扳手智能转换接头,与实施例1不同的是:所述编码器式转角传感器40设置于转换接头本体10下部输出方榫12的上方,包括码盘41和读码器42,所述读码器42与码盘41配合设置于转换接头本体10下部的盒体内,读码器42固定于盒体的内壁,盒体下端敞口,并设有封盖48。码盘41与旋转臂43固定连接,并可沿转换接头本体10中心轴线呈360
°
转动,所述旋转臂43通过销轴49与上支撑臂44连接,上支撑臂44与中支撑臂45固定连接,中支撑臂45与下支撑臂47固定连接,下支撑臂47外套有软橡胶外套46;中支撑臂45为绝缘柔性材质,下支撑臂47为强磁体材质。目的是实现下支撑臂与外部金属支撑件间形成可靠固定,使得编码器式转角传感器40采集的转角值准确可靠。施扭作业时,码盘41固定不动,读码器42随智能转换接头本体同步转动。
35.实施例3
36.本实施例的可监控扭矩和转角的套筒扳手智能转换接头,与实施例1及实施例2不同的是:如图3所示,所述微电子检测电路20包括微处理器21、液晶显示器24、无线通讯模块28以及充电及电源管理电路26;扭矩传感器15 输出的电压信号经扭矩信号调理电路27接入微处理器21;编码器式转角传感器40输出的脉冲信号经转角信号调理电路25接入微处理器21;微处理器21通过i/0口经指示灯驱动电路22分别驱动扭矩指示灯33、转角指示灯34和角速率指示灯35进行操作指示,微处理器21还通过i/0口经喇叭驱动模块23驱动喇叭36进行操作过程的语音提示;液晶显示器24与微处理器21内部的液晶驱动器连接。
37.所述微电子检测电路的微处理器21内含a/d转换器、数据运算单元、非易失数据存储器、液晶驱动器、多种串行接口和一定数量的i/o口。微处理器21内部的非易失性数据存储器,除了存储运行程序和多组施扭作业结果数据外,还存储有扭矩和转角的多点校准数
据表以及扭矩初始值,扭矩合格值、转角合格值和角速率值及其范围等控扭参数。
38.扭矩传感器15输出的电压信号经扭矩信号调理电路27接入微处理器21内部的a/d转换器,进行a/d转换、数字滤波,结合多点校准数据表进行数据运算得到实时扭矩数据,转角传感器40输出的脉冲信号经转角信号调理电路25接入微处理器21内部的外部中断接口,进行旋转方向判别、转角和角速率计算,得到实时转角和角速率数据。
39.工作过程中,微处理器21将实时扭矩和转角数据送液晶显示器显示的同时,与角速率数据一起同非易失性存储器内所存的扭矩初始值,扭矩合格值、转角合格值和角速率值以及各自的控制范围值等参数进行比较和逻辑运算,运算结果一方面通过i/0口经指示灯驱动电路22分别驱动扭矩指示灯33、转角指示灯34和角速率指示灯35进行操作指示,另一方面经喇叭驱动模块23进行多段语音智能组合,驱动喇叭36进行相应的控扭操作语音提示。
40.扭矩指示灯33、转角指示灯34和角速率指示灯35为镶嵌于转换接头本体10上下侧的光导纤维灯环,由指示灯驱动电路22驱动发出不同颜色的环状光线。
41.液晶显示器可显示的数据包括:具有峰值保持功能的正反方向的实时扭矩值和实时转角值,扭矩初始值,扭矩合格值、转角合格值和角速率值及其范围等相关控扭参数,以及电池剩余电量信息及无线连接状态。
42.微处理器21实时采集扭矩、转角和角速率值,根据下述条件智能判断一次施扭过程结束,为保存并上传施扭作业数据依据,包括:
43.1)当转角值停止增加,表示施扭过程停止,自动判断为一次施扭作业过程结束;
44.2)角速率值超出设定范围,表示操作者在施扭时用力过猛,或忽快忽慢很不平稳,导致扭矩偏差过大,自动判断为一次施扭作业过程结束。
45.微处理器21的uart串行接口与无线通讯模块28通信连接,该模块采用基于lora扩频技术的物联网无线收发器semtech
‑
sx1268,在抗干扰性能、通信距离都远超现在的 fsk、gfsk 调制方式的产品。工作中,所述控扭参数和校准数据表通过无线通讯模块28可由用户在上位机50上读取、编辑、存储和下传,当自动判断一次施扭作业结束后,微处理器21一方面将施扭作业结果数据存入非易失性存储器,另一方面自动上传到上位机保存,由上位机对施扭作业进行全过程监控,对作业结果数据进行统计分析,实现作业数据可追溯。
46.所述上位机50为安装有相应app软件的便携式智能终端,或设置在施扭作业现场且处于监控网络中工控计算机。
47.实施例4
48.本实施例的可监控扭矩和转角的套筒扳手智能转换接头,与实施例1或2的不同之处在于:所述驱动方孔11、输出方榫12、扭矩传感器15及转角传感器40处于同一中心轴线上,这样可以有效地减少操作人员的人为因素对扭矩检测和控制精度的影响。
49.实施例5
50.本实施例的可监控扭矩和转角的套筒扳手智能转换接头,进一步的,公开了所述充电及电源管理电路26,由锂电池电量计cw2018和多个可控低压差稳压器(ldo)r1114或专用电源管理器cw3603及其外围电路组成,与微处理器21的i2c接口和i/o口连接。所述电量计实时监测锂电池充放电状态下的电压、电流和温度,并准确计算锂电池的剩余电量,剩余电量信息由液晶显示器24显示;锂电池70的输出电源连接可控低压差稳压器或电源管理器
的输入端,输出端分别连接耗电量较多的微处理器21、扭矩传感器15、转角传感器40、无线通讯模块28、液晶显示器24的背光驱动等部分。
51.微处理器21实时检测转换接头的工作状态,一定时间(可由上位机设置)内不工作时,微处理器21通过i/o口可分别关闭耗电量较多的扭矩传感器15,转角传感器40,无线通讯模块28,液晶显示器24的背光驱动器等部分,随后微处理器21进入极低功耗的休眠状态以延长电池使用时间。进入休眠状态的微处理器21可通过施加一定扭矩或上位机唤醒。
52.图4所示为本实用新型智能转换接头多种工作模式控制流程图;图5所示为智能转换接头使用状态示意图,普通手动扭矩扳手80的驱动方榫垂直插于智能智能转换接头1的驱动方孔11中,智能智能转换接头1的输出方榫垂直插于套筒扳手头81的方孔中,套筒扳手头81施扭工件83上的螺母82,支撑臂固定于工件上的突出物84。
53.参见图4,当施加一定扭矩或上位机发送唤醒指令将本智能转换接头唤醒后,首先自动监测所处的网络环境,有网络时,上位机50将初始扭矩值,扭矩合格值、转角合格值和角速率值以及各自的控制范围值等控扭参数下传到微处理器内部的非易失数据存储器中保存,根据上位机指令,分别进入下述四种控扭模式:
54.1)无网络时默认进入普通扭矩转角检测控制模式,仅按所存校准参数表进行扭矩和转角检测以及实时显示,满足结束条件时,本次施扭完成,自动将本次施扭作业数据保存到微处理器的非易失性存储器中,不进行数据上传;
55.2)有网络时的按扭矩法施扭工艺作业的扭矩检测控制模式,智能转换接头与上位机进行无线通讯,当收到上位机按扭矩法作业指令时,进入仅控制扭矩的施扭作业模式,微处理器采集计算和显示实时扭矩值和转角值,计算角速率值,并与预置的角速率和扭矩合格值动态比较和逻辑判断,进行扭矩和角速率的灯光指示和语音提示,满足本次施扭作业结束条件时,本次施扭完成,保存并上传扭矩峰值或扭矩峰值和施扭不合格原因;
56.3)有网络时的按扭矩
‑
转角法施扭工艺作业的扭矩和转角联合检测控制模式,智能转换接头与上位机进行无线通讯,当收到上位机按扭矩
‑
转角法作业指令时,进入同时对扭矩值和转角值检测控制的施扭作业模式,微处理器采集计算和显示实时扭矩值和转角值,计算角速率值,并与预置的角速率范围和扭矩初始值动态比较,达到扭矩初始值时,转角值清零并开始重新计算和显示,同时转为实时角速率、扭矩和转角值分别与预设的角速率范围、扭矩合格值和转角合格值动态比较逻辑判断,进行扭矩和转角的灯光指示和语音提示,满足施扭结束条件时,本次施扭完成,保存并上传扭矩峰值、转角峰值或转角峰值和施扭不合格原因;
57.4)有网络时的扭矩和转角校准模式,智能转换接头与上位机进行点对点无线通讯,当收到上位机校准指令时,进入此模式,通过标准装置分别对扭矩和转角在量程范围内进行多点校准,形成校准数据表并存储于智能转换接头微处理器的非易失性存储器中,同时发送到上位机中保存。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1