机器人的连接装置、机器人及系统的制作方法
1.本技术涉及连接装置领域,尤其涉及机器人的连接装置、机器人及系统。
背景技术:
2.随着科学技术不断的发展,机器人已经是日常生产中不可缺少的部分。例如在食品或者医疗行业用来代替人工实现搬运、理料和码放等功能的机器人,一部分工作需要两个或者多个机器人连接起来协同完成。
3.目前市场上的多个机器人分别设置了接口,主要用于两台机器人之间的连接和通讯,传统的接口连接方式有线缆连接,如usb type
‑
c,但是线缆链接拔插不方便;新型的接口连接方式有蓝牙连接或wifi无线连接,但是这种连接方式技术相对复杂并且相应时间较慢。
4.综上,两个机器人的接口连接消耗的时间长、难度大,从而导致连接两个机器人所消耗的时间过长、难度大。
技术实现要素:
5.发明人对两个机器人的接口连接消耗的时间长、难度大的原因进行了研究,发明人发现:每个机器人都设置了第一连接构件和第二连接构件,第一连接构件包括凸起和第一接口,第一接口设置于凸起之中,第二连接构件包括与凸起形状匹配的凹槽和第二接口,第二接口设置于凹槽内。通过凸起对准并插入凹槽卡紧,同时引导第一接口对准并插入第二接口,实现了接口的连接及固定。然而,凸起在对准插入凹槽的过程中,由于是人为操作,插入角度不可能一致保持不变,所以二者不可避免地会接触到产生摩擦,甚至卡死无法完全插入,所以需要不断调整凸起插入凹槽的角度,特别是凸起和凹槽为长方体形时,插入的难度会更大,这无疑增加了第一接口与第二接口连接的时间及难度,从而引发了前述连接两个机器人所消耗的时间过长、难度大的缺陷。
6.综上,本技术的目的在于提供机器人的连接装置、机器人及系统,以解决前述各问题,更具体地,本技术要解决的问题是:如何降低连接机器人所消耗的时间及难度。
7.具体来说,本技术采取的手段是用磁体引导第一接口与第二接口连接。
8.更进一步的,本技术通过以下技术方案实现:
9.<第一方面>
10.本技术的第一方面提供了机器人的连接装置,包括:
11.第一连接构件,所述第一连接构件包括第一接口和至少一个第一磁体;和
12.第二连接构件,所述第二连接构件包括第二接口和与所述至少一个第一磁体一一对应且极性相反的第二磁体,
13.其中,所述第一磁体及所述第二磁体用于引导所述第一接口与所述第二接口连接。
14.通过所述第一磁体与所述第二磁体之间相互吸引力作用,引导所述第一接口与所
述第二接口抵接,实现所述第一接口与所述第二接口的连接,避免了前述因摩擦卡死导致接口连接时间长的问题,从而降低了所述第一接口与所述第二接口的连接时间及难度,从而降低了机器人之间的连接时间及难度。
15.在一些技术方案中,所述至少一个第一磁体的数量为两个以上。
16.在一些技术方案中,所述两个以上的第一磁体设置于所述第一接口的两侧。
17.在一些技术方案中,所述第二磁体的数量为两个以上。
18.在一些技术方案中,所述两个以上第二磁体设置于所述第二接口的两侧。
19.在一些技术方案中,所述第一接口包括至少一个第一导电接头。
20.在一些技术方案中,所述第二接口包括与所述至少一个第一导电接头一一对应的至少一个第二导电接头。
21.需要说明的是,所述第一磁体与所述第二磁体的数量为两个以上,其中两个以上包括两个。
22.<第二方面>
23.本技术的第二方面提供了机器人,包括:
24.机器人主体;和
25.第一方面所述的机器人的连接装置,
26.其中,所述机器人的连接装置中的所述第一连接构件和所述第二连接构件分别与所述机器人主体连接。
27.在一些技术方案中,所述机器人主体包括底座,所述机器人的连接装置中的所述第一连接构件和所述第二连接构件分别与所述底座连接。
28.<第三方面>
29.本技术的第三方面提供了机器人系统,包括:
30.多个第二方面所述的机器人。
31.相对现有技术而言,本技术至少可以实现以下有益效果:
32.本技术通过所述第一磁体与所述第二磁体之间相互吸引力作用,引导所述第一接口对准并插入所述第二接口,实现所述第一接口与所述第二接口的连接,避免了前述因摩擦卡死导致接口连接时间长的问题,从而降低了所述第一接口与所述第二接口的连接时间及难度,从而降低了机器人之间的连接时间及难度。同时,所述第一连接构件与所述第二连接构件分别与所述底座连接,由于多对所述第一磁体与所述第二磁体之间相互吸引力作用,对所述第一接口与所述第二接口起到限位作用,加强了机器人连接的稳定性。
附图说明
33.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域技术人员来讲,还可以根据这些附图获得其他的附图。
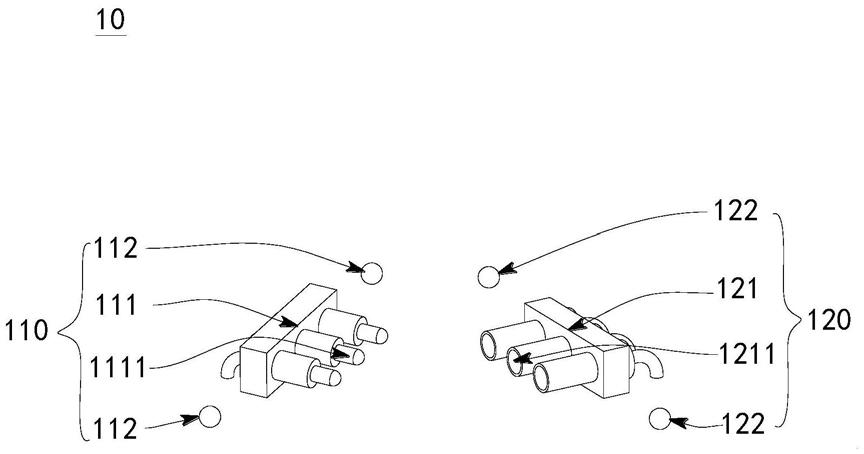
34.图1为本技术的一些实施例中机器人的连接装置的示意图;
35.图2为本技术的一些实施例中两个机器人的连接装置与底座的连接示意图;
36.图3为本技术的一些实施例中机器人的连接装置与底座连接的另一个示意图;
37.图4为本技术的一些实施例中机器人的示意图;
38.图5为本技术的一些实施例中机器人系统的示意图;
39.图6为本技术的一些实施例中机器人系统的两个底座连接后的正面示意图;
40.图7为本技术的一些实施例中机器人系统的两个底座连接后的俯视示意图;
41.附图标记:
42.0、机器人系统;1、机器人;10、连接装置;110、第一连接构件;111、第一接口;1111、第一导电接头;112、第一磁体;120、第二连接构件;121、第二接口;1211、第二导电接头;122、第二磁体;20、机器人主体;210、底座。
具体实施方式
43.下面结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
44.<第一方面>
45.如图1所示,第一方面提供了一种机器人的连接装置10,包括:
46.第一连接构件110,所述第一连接构件110包括第一接口111和至少一个第一磁体112;和
47.第二连接构件120,所述第二连接构件120包括第二接口121和与所述至少一个第一磁体112一一对应且极性相反的第二磁体122,
48.其中,所述第一磁体112及所述第二磁体122用于引导所述第一接口111 与所述第二接口121连接。
49.具体的,当一个机器人的第一连接构件110靠近另一个机器人的第二连接构件120时,第一连接构件110上的第一磁体112与第二连接构件120上的第二磁体122相互吸引,使得第一接口111对准并插入第二接口121。
50.综上,通过所述第一磁体112与所述第二磁体122之间相互吸引力作用,引导所述第一接口111与所述第二接口121抵接,实现所述第一接口111与所述第二接口121的连接,避免了前述因摩擦卡死导致接口连接时间长的问题,从而降低了所述第一接口111与所述第二接口121的连接时间及难度,从而降低了机器人之间的连接时间及难度。
51.如图1
‑
图4所示,在一些实施例中,所述至少一个第一磁体112的数量为两个以上;所述第二磁体122的数量为两个以上。
52.具体的,在本实施例中,第一磁体112的数量为两个,第二磁体122的数量也为两个,进一步降低了所述第一接口111与第二接口121的连接难度。
53.如图1
‑
图4所示,在一些实施例中,所述两个以上的第一磁体112设置于所述第一接口111的两侧;所述两个以上第二磁体122设置于所述第二接口121的两侧。
54.具体的,在本实施例中,两个第一磁体112分别对称设置于所述第一接口111的左右两侧,两个第二磁体122分别对称设置于所述第二接口121的左右两侧,当然,在一些实施例中,所述第一磁体112还可以设置在所述第一接口111的上下两侧,所述第二磁体122也可以同样设置。这样设置进一步降低了所述第一接口111与第二接口121的连接难度,同时由
于两对磁体的固定作用,使得第一连接构件110与第二连接构件120在上下左右四个方向固定,二者不会产生摆动,增加了连接的稳定性。
55.如图1所示,在一些实施例中,所述第一接口111包括至少一个第一导电接头1111;所述第二接口121包括与所述至少一个第一导电接头1111一一对应的至少一个第二导电接头1211。
56.具体的,在本实例中,所述第一接口111包括三个第一导电接头1111,第一导电接头1111设置为一端相对较粗、另一端相对较细的圆柱体形;所述第二接口121包括三个第二导电接头1211,所述第二导电接头1211也设置为圆柱体形,其接触端设置为半球形的凹槽。第一连接构件110上的第一磁体112与第二连接构件120上的第二磁体122相互吸引,使得三个第一导电接头1111的较细一端分别与三个第二导电接头1211的凹槽抵接,从而实现了第一接口111与第二接口121的连接。
57.<第二方面>
58.如图5所示,第二方面提供了机器人1,包括:
59.机器人主体20;和
60.第一方面所述的机器人的连接装置10,
61.其中,所述机器人1的连接装置10中的所述第一连接构件110和所述第二连接构件120分别与所述机器人主体20连接。
62.在一些实施例中,所述机器人主体20包括底座210,所述机器人1的连接装置10中的所述第一连接构件110和所述第二连接构件120分别与所述底座210连接。
63.具体的,在本实施例中,所述机器人1的连接装置10中的所述第一连接构件110和所述第二连接构件120分别安装在所述机器人主体20之内,更优选的是,如图2
‑
图4所示,机器人主体20设置了一个底座210,所述底座 210两侧分布设置一个类似操场跑道的椭圆形凸起以及与所述凸起匹配的椭圆形凹槽,所述第一接口111的第一导电接头1111设置于所述凹槽内,所述第二接口121的第二导电接头1211设置于所述凸起中。
64.通过将所述第一连接构件110与所述第二连接构件120安装在所述底座210两侧,由于所述第一磁体112与所述第二磁体122的相互吸引力作用,一个机器人的第一接口111与另外一个机器人的第二接口121可以轻易的快速连接上,降低了机器人的连接难度。
65.<第三方面>
66.如图6、图7所示,第三方面提供了机器人系统0,包括:
67.多个第二方面所述的机器人1。
68.具体的,在本实施例中,所述机器人系统0包括三个机器人1,每个机器人1都设置有第一方面所述的所述连接装置10,同时该连接装置10固定安装在机器人1的底座210上,所述第一连接构件110和第二连接构件120 对称分布在底座210的两侧。第一个机器人1的第一连接构件110与第二个机器人1的第二连接构件120连接,同时第一个机器人1的第二连接构件120 与第三个机器人1的第一连接构件110连接,即组成了包括三个机器人1的机器人系统0,机器人系统0中的三个机器人1可以做出相同或者相异的动作。
69.综上,本技术提供的连接装置10至少可以实现以下有益效果:
70.本技术通过所述第一磁体112与所述第二磁体122之间相互吸引力作用,引导所述第一接口111对准并插入所述第二接口121,实现所述第一接口111 与所述第二接口121的
连接,避免了前述因摩擦卡死导致接口连接时间长的问题,从而降低了所述第一接口111与所述第二接口121的连接时间及难度,从而降低了机器人1之间的连接时间及难度。同时,所述第一连接构件110 与所述第二连接构件120分别与所述底座210连接,由于多对所述第一磁体 112与所述第二磁体122之间相互吸引力作用,对所述第一接口111与所述第二接口121起到限位作用,加强了机器人1之间连接的稳定性。
71.尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1