一种带机械臂的拖车型自主配送机器人及其控制系统
1.本技术涉及机器人技术领域,具体为一种带机械臂的拖车型配送机器人及其控制系统。
背景技术:
2.随着机器人技术的发展,机器人的应用已经成为了一种趋势。自主配送机器人可用于医院内患者的药品配送,大大减轻医护人员的工作强度及减少药品配送出错率,同时自主配送也能在一定程度上降低交叉感染的风险;也可用于物流、餐厅服务,实现对物品的自主配送。
3.目前大多数自主配送机器人都采用单车货柜式,存在单次物品配送量少且物品存储位置不确定性,机械臂无法判断抓取目标的位置,需人工将物品放入或取出配送箱,无法实现真正意义上的自主配送。
技术实现要素:
4.针对现有技术存在的不足,本实用新型提供了一种可实现无人自主配送的机器人及其控制系统,能够提高单次配送效率,且实现配送机器人自主存放物品。
5.为实现上述目的,本实用新型的技术方案如下:
6.一种带机械臂的拖车型自主配送机器人,包括牵引车车头、机械臂、拖车连接装置、循环式车厢,所述牵引车车头通过拖车连接装置与循环式车厢连接,所述牵引车车头上方设置有机械臂和深度摄像头及全方位云台。
7.所述牵引车车头为四层平台结构,从上到下,第一层设置有机械臂、深度摄像头、全方位云台,第二层设置有minipc、电源,第三层设置有激光雷达、第四层设置有stm32、加压模块、驱动模块。
8.所述循环式车厢包括箱门、箱体、循环机构和平衡机构,所述循环机构包括设置在箱体内部的两组同一水平的偏置传动轴与主传动轴,一组在箱体上方,另一组在箱体下方,主传动轴两端安装有链轮,两条主链条分别绕上下链轮,所述主链条上设置有存储箱,偏置传动轴与主传动轴上安装相同的链轮,电机通过同步带带动偏置传动轴转动。
9.所述箱门下方设置有齿条,电机固定在顶壳内带动齿轮,齿轮与齿条啮合从而使箱门开合。
10.所述平衡机构利用平行四杆机构的基本原理,偏置传动轴与主传动轴安装在同一水平位置,且上侧偏置传动轴与主传动轴的中心线间距等于下测偏置传动轴与主传动轴的中心线间距。
11.所述拖车连接装置主要包括牵引车连接件、下连接轴固定座、上连接轴固定座和连接轴,牵引车连接件通过螺栓连接与前约束件固定,还通过键连接与连接轴固定;为了方便连接轴的安装,将固定座分割为两部分:上连接轴固定座和下连接轴固定座,两者之间采用螺栓连接,此外,连接轴与连接轴固定座、之间采用轴承来减小摩擦。
12.一种带机械臂的拖车型自主配送机器人的控制系统,包括上位机系统和下位机系统;所述上位机系统以mini pc为核心,下位机系统以stm32单片机为核心,上位机系统中,远程计算机可通过由无线路由器建立的局域网实现对mini pc的远程监控;下位机系统中,stm32单片机通过驱动模块实现对两个驱动电机的实时控制,两个驱动轮分别带有二进制光电编码器,可将运动数据反馈至单片机中,实现对驱动轮的闭环控制;绝对值编码器测量反馈牵引车与拖车的夹角数据,用于保证机器人运动的可靠性;激光雷达直接与上位机系统中的mini pc连接,收集周围外部环境信息;上位机与下位机系统之间采用串口通信的方式实现数据的双向传递。
13.本实用新型具体有益效果如下:
14.本实用新型所提供的带机械臂的拖车式配送机器人,可搭配不同种类机械臂、手爪和车厢实现多种不同种类物品的配送任务。
15.本实用新型所提供的移动底盘结合机械臂的方式,不仅实现了配送过程中的导航功能,还实现了自主抓取功能,完成了配送过程无人化,大大减轻了工作强度。
16.本实用新型所提供的循环式车厢,简化了机械臂抓取轨迹,提高了机器臂抓取成功率。
附图说明
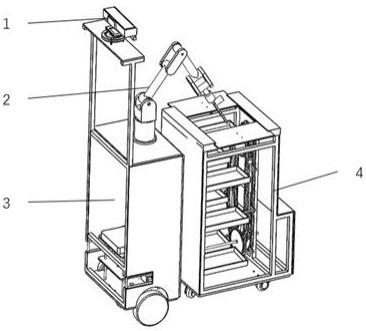
17.图1为本实用新型带机械臂的拖车型自主配送机器人的整体示意图;
18.图2为本实用新型带机械臂的拖车型自主配送机器人的整体结构示意图;
19.图3为本实用新型带机械臂的拖车型自主配送机器人的整体俯视图;
20.图4为本实用新型带机械臂的拖车型自主配送机器人的车厢结构图;
21.图5为本实用新型带机械臂的拖车型自主配送机器人的车厢俯视图;
22.图6为本实用新型带机械臂的拖车型自主配送机器人的拖车连接装置结构图;
23.图7为本实用新型带机械臂的拖车型自主配送机器人的控制系统模块连接图。
24.其中,1-深度摄像头、2-机械臂、3-牵引车车头、4-循环式车厢、5-全方位云台、6-minipc、7-激光雷达、8-拖车连接装置、9-箱门、10-齿条、11-主传动轴、12-存储箱、13-齿轮、14-主链条、15-偏置链条、16-偏置传动轴、17-l型杆、18-电机、19-小链条、20-绝对值编码器、21-弹性联轴器、22-c型固定座、23-连接轴、24-上连接轴固定座、25-下连接轴固定座、26牵引车连接件、27-前约束件、28-后约束件、29-连接扣、30-连接螺钉、31-拖车固定件。
具体实施方式
25.下面结合具体实施方式对本实用新型进行详细的说明。
26.如图1、2、3是本实用新型提供带机械臂的拖车型自主配送机器人的整体示意图,包括拖牵引车车头3、机械臂2、拖车连接结构8、循环式车厢4、控制装置,机械臂2固定在车头外壳3上,车头3和车厢4两部分通过连接装置8连接。
27.所述循环式车厢4可以采用多种样式,图中提供一种循环式车箱,车头外壳3上安装深度摄像头1和全方位云台5;所述全方位云台5可实现深度摄像头1的俯仰和旋转,配合深度摄像头1识别抓取物及其位置和深度信息,车头通过u型板搭建成四层平台结构,从上
到下,第一层设置有机械臂2、深度摄像头1、全方位云台5,第二层设置有minipc6、电源,第三层设置有激光雷达7、第四层设置有stm32、加压模块、驱动模块。
28.如图4、5是本实用新型提供带机械臂的拖车型自主配送机器人的车厢结构示意图,偏置传动轴16与主传动轴11安装在同一水平,上侧偏置传动轴16与主传动轴11的中心线间距等于下侧偏置传动轴16与主传动轴11的中心线间距,偏置传动轴16与主传动轴11上安装相同的链轮,电机通过同步带带动偏置传动轴16转动,偏置传动轴16与主传动轴11之间通过小链轮和链条传动,从而使偏置链条15与主链条14的转动速度和方向相同,主传动轴11两端安装有链轮,两条主链条14分别绕上下链轮,存储箱12安装在两侧的主链条14上,以上构成了车箱的循环机构。
29.所述循环式车厢采用链轮链条传动方式,带动存储箱进行循环运动。到达配送区域后,箱门由电机控制自动打开,摄像头采集盒中信息,识别到待抓物品后,物品放置盒运动到最高点停止,控制机械臂进行抓取。
30.如图3、4、5箱门采用齿轮齿条进行开合,齿条10固定再箱门的下方,电机固定在顶壳内带动齿轮13,齿轮10与齿条13啮合从而使箱门开合,并且箱门两端安装有滚动小轮卡在顶壳内,所述顶壳为车厢上方箱门旁边的外壳,滚动小轮卡在车厢外壳上。
31.如图6拖车连接结构主要包括牵引车连接件26、下连接轴固定座25、上连接轴固定座24和连接轴23,牵引车连接件26通过螺栓连接与前约束件27固定,还通过键连接与连接轴23固定;为了方便连接轴的安装,将固定座分割为两部分: 24和下连接轴固定座25,两者之间采用螺栓连接,此外,连接轴23与连接轴固定座24、25之间采用轴承来减小摩擦。
32.图7为本实用新型提供带机械臂的拖车型自主配送机器人的控制系统模块连接图,装有ros系统的minipc6安装在牵引车车头3,作为数据处理和决策层,接受各个模块的反馈信息以及传感器对周围环境采集的信息,对这些信息进行处理,并向下位机发送命令,激光雷达7、深度摄像头1,将获取的周围环境信息直接发送至上位机处理,实现躲避障碍物和自主导航,其中深度摄像头1可以通过算法对目标物进行定位与识别,从而实现机械臂2自主存取物品的控制,深度摄像头1安装在牵引车车头3的支架上,且深度摄像头2的底座安装有全方位云台5,使摄像头进行旋转和仰俯,其作用为:对车厢中的药品进行定位与识别,以及目标位置的选择,用于机械臂2的抓取,还有用于医用配送机器人动态避障。minipc可以与远程计算机实现数据的互传,远程计算机可以实时的查询机器人的状态,根据这些信息对多台配送机器人进行调度。由于采用牵引车和拖车的结构,下位机分为三个模块,其中模块一为牵引车车头3的控制单元,模块二为循环式车厢4的控制单元,模块三为机械臂2的控制单元。
33.本实用新型的内容不限于实施例所列举,本领域普通技术人员通过阅读本实用新型说明书而对本实用新型技术方案采取的任何等效的变换,均为本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1