一种医疗服务机器人
1.本实用新型属于服务机器人技术领域,具体涉及一种医疗服务机器人。
背景技术:
2.医用机器人是服务机器人中最重要的领域之一。医用机器人有一个非常宽泛的概念,可以说用于医疗健康领域的机器人或者机器人化设备。如:手术机器人、康复机器人、医用服务机器人和智能设备。能辅助医生的工作、扩展医生的能力。医用机器人是需求量最大最实用的机器人之一。应用医疗服务机器人是因为它比人更精准、更快捷、更稳定,且能长时间地在高温、低温、辐射等恶劣环境下工作,所以设计一款具有送药、消毒、巡诊等功能的医疗服务机器人具有较大的实用意义。
技术实现要素:
3.本实用新型所要解决的技术问题便是针对上述现有技术的不足,提供一种医疗服务机器人,它能够辅助医生进行送药、消毒等工作,同时其还具备辅助检测心率、血压和体温的能力。
4.本实用新型所采用的技术方案是:一种医疗服务机器人,包括底盘,底盘底面安装有数个全向轮,每个全向轮连接一个驱动电机,驱动电机固定在底盘底面,所述底盘表面上通过支撑杆连接有放置板,放置板上通过支撑杆连接有顶板,所述底盘、放置板和顶板四周安装有外壳,所述放置板上固定安装有喷洒头、水泵和消毒液箱,所述消毒液箱通过水管与水泵连接,喷洒头通过水管与水泵连接,所述顶板表面两侧固定安装有药箱,顶板上一侧边缘固定安装有心率血压测量仪和体温测量仪,顶板上还固定安装有激光雷达,所述顶板中心安装有转动架,转动架下方设有旋转舵机,转动架顶部设有转动盘,转动盘底部与旋转舵机连接,所述转动盘顶面固定安装有调节舵机,调节舵机连接有机械臂,所述机械臂远离调节舵机的一端连接有连接座,连接座远离机械臂的一侧安装有机械手,所述连接座中部还固定安装有openmv摄像头,openmv摄像头下方设有吸盘,所述吸盘通过连杆固定在连接座上。
5.作为优选,所述药箱顶部一侧铰接有盖体,铰接处连接有开盖舵机。
6.作为优选,所述喷洒头设有三个,三个喷洒头绕外壳均匀分布。
7.作为优选,所述机械臂包括长臂支架和u形支架,所述长臂支架一端与调节舵机连接,另一端通与u形支架之间通过肩部舵机连接,所述u形支架之间固定连接有肘部舵机,肘部舵机上安装有腕部舵机,腕部舵机与连接座固定连接。
8.作为优选,所述机械爪包括两个夹持舵机,两个夹持舵机对称安装在连接座上,夹持舵机的驱动轴通过连接架连接有机械指。
9.作为优选,所述顶板上还固定安装有显示屏。
10.本实用新型的有益效果在于:
11.(1)设置有药箱、机械臂、机械手和openmv摄像头,通过openmv摄像头识别病人信
息和药品信息,再通过机械臂和机械手给对应病人配药;
12.(2)设置有喷洒头,能在配药结束后对病房内进行消毒;
13.(3)设置有心率血压测量仪和体温测量仪,能在配药时,给病人检测心率、血压和体温。
14.本实用新型集送药、消毒、巡诊等功能于一身,能辅助医生为病人提供高效的服务,实用性强,大大降低了人工成本。
附图说明
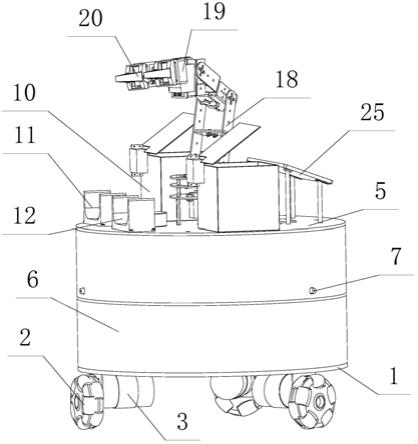
15.图1为本实用新型结构示意图;
16.图2为本实用新型内部示意图;
17.图3为本实用新型机械臂结构示意图;
18.图4为本实用新型机械爪结构示意图。
19.图中:1、底盘;2、全向轮;3、驱动电机;4、放置板;5、顶板;6、外壳;7、喷洒头;8、水泵;9、消毒液箱;10、药箱;11、心率血压测量仪;12、体温测量仪;13、激光雷达;14、转动架;15、旋转舵机;16、转动盘;17、调节舵机;18、机械臂;19、连接座;20、机械手;21、openmv摄像头;22、吸盘;23、盖体;24、开盖舵机;25、显示屏;1801、长臂支架;1802、u形支架;1803、肩部舵机;1804、肘部舵机;1805、腕部舵机;2001、夹持舵机;2002、连接架;2003、机械指。
具体实施方式
20.下面将结合附图及具体实施例对本实用新型作进一步详细说明。
21.实施例
22.如图1、图2、图3和图4所示,本实施例提供的医疗服务机器人,包括底盘1,底盘1底面安装有数个全向轮2,本实施例中为三个,并呈三角分布,每个全向轮2连接一个驱动电机3,驱动电机3固定在底盘1底面,用于驱动全向轮2滚动,从而带动底盘1移动;
23.所述底盘1表面上通过支撑杆连接有放置板4,放置板4上通过支撑杆连接有顶板5,所述底盘1、放置板4和顶板5四周安装有外壳6,所述放置板4上固定安装有喷洒头7、水泵8和消毒液箱9,所述消毒液箱9通过水管与水泵8连接,喷洒头7通过水管与水泵8连接,本实施例中,所述喷洒头7设有三个,在放置板4上呈三角均匀分布,每个喷洒头7分别对应一个水泵8和一个消毒液箱9;
24.所述顶板5表面两侧固定安装有药箱10,药箱10顶部一侧铰接有与其配合的盖体23,所述药箱10与盖体23的铰接处安装有开盖舵机24,开盖舵机24工作,带动铰接处转动,从而实现开盖或关盖的动作;
25.所述顶板5上一侧边缘固定安装有心率血压测量仪11和体温测量仪12,所述心率血压测量仪11和体温测量仪12均设置为u型状,便于病人将手腕置于其中,从而进行心率、血压、体温的测量;
26.所述顶板5上还固定安装有激光雷达13,用于扫描病房内的情况,并进行建模,从而通过工控机计算后进行避障,使得机器人能在病房内自主移动;
27.所述顶板5上还固定安装有显示屏25,用于显示测量的心率、血压和体温;
28.所述顶板5中心安装有转动架14,转动架14下方设有旋转舵机15,转动架14顶部设
有转动盘16,转动盘16底部与旋转舵机15连接,所述转动盘16顶面固定安装有调节舵机17,调节舵机17的驱动轴与长臂支架1801连接,长臂支架1801的另一端与u形支架1802之间通过肩部舵机1803连接,所述u形支架1802之间固定连接有肘部舵机1804,肘部舵机1804上安装有腕部舵机1805,腕部舵机1805与连接座19固定连接,所述连接座19上两侧对称固定有夹持舵机2001,夹持舵机2001的驱动轴连接有连接架2002,连接架2002上固定安装有机械指2003,两个夹持舵机2001的相对转动,实现对两个机械指2003的相对运动,从而实现对药品的夹持或放开;所述连接座19上两个夹持舵机2001之间还固定安装有openmv摄像头21,openmv摄像头21下方设有吸盘22,所述吸盘22通过连杆固定在连接座19上;所述openmv摄像头21用于扫描病床床头处病人信息二维码,同时用于扫描取放药品的种类,保证药品与病床病人对应。
29.使用时,医务人员将药品装放在药箱10中,机器人通过激光雷达13对病房进行扫描建模,建模避障后控制器控制驱动电机3工作,实现避障移动,从而顺利达到病人床前,通过机械臂18动作,使openmv摄像头21朝向床头柜病人的信息的二维码处,通过二维码识别病人后,控制器控制机械臂18和机械爪动作,同时利用openmv摄像头21检测药箱10内的药品,识别到病人对应药品后,控制器控制再次控制机械臂18和机械爪将药品取出,完成药品配送,药品配送后病人将手腕放置在心率血压测量仪11和体温测量仪12上,测得病人的心率、血压和体温,并通过显示屏25显示;送药和巡诊完成后,控制器控制机器人移动,在移动的同时控制水泵8在消毒液箱9中抽取消毒液,并从喷洒头7喷出,完成病房的消毒工作。
30.以上所述仅是本实用新型优选的实施方式,但本实用新型的保护范围并不局限于此,任何基于本实用新型所提供的技术方案和发明构思进行的改造和替换都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1