一种机械手收卷装置的制作方法
1.本实用新型属于机器人技术领域,尤其涉及一种机械手收卷装置。
背景技术:
2.区别于传统的关节串联型机械臂,柔性机械臂具有灵活度高、避障能力强等优点,在狭小空间和复杂环境中运动和操作能力强,在航空航天制造、大型装备检测维护等领域具有重要的应用价值。
3.机械臂包括收卷机构、机械手臂等,其中,收卷机构是控制其进行收卷动作的驱动件,现有专利(专利申请号:201210514688.6)公布的采用多个气缸或液缸的驱动方式,来控制每一节关节的角度和长度,从而控制整个机械臂的姿态。虽然上述收卷结构实现了机械臂的收卷,但还是存在如下的问题,包括整体结构过于复杂,自身沉重不便于控制,以及因柔性材料造成的控制精度不高等。
技术实现要素:
4.本实用新型的目的在于提供一种机械手收卷装置,整体结构简单,质量小,可操作性好。
5.为了达到上述目的,本实用新型的技术方案如下:
6.一种机械手收卷装置,包括机壳、控制机械手弯曲的动力绳以及收放动力绳的驱动组件,驱动组件包括电机和收卷辊,电机固定连接于机壳上,电机输出轴上固定连接有第一锥齿轮,收卷辊转动连接于机壳上,收卷辊上固定配合有与第一锥齿轮啮合的第二锥齿轮,动力绳远离机械手的一端缠绕于收卷辊远离第二锥齿轮的一侧。
7.基于上述方案,使用时,电机通过输出轴驱动第一锥齿轮转动,由于第二锥齿轮与第一锥齿轮啮合,因此电机启动后会带动第二锥齿轮转动,进而带动收卷辊转动,收卷辊转动对动力绳进行收卷或者放卷,收卷辊收卷动力绳时会带动机械手执行弯曲动作,机械手弯曲后收卷辊再放卷动力绳时机械手会在其自身的复位结构带动下恢复至初始状态。
8.本方案通过电机、收卷辊和动力绳的配合实现机械手的弯曲和伸直,整体结构简单,质量小,可操作性好。
9.优选地,收卷辊远离第二锥齿轮的一侧固定套接有两块圆形的挡板,动力绳缠绕于收卷辊位于两块挡板之间的部分。挡板对动力绳的位置进行限位,使动力绳集中在指定位置处,利于实现动力绳的收卷和放卷。
10.优选地,机械手与收卷辊之间设有手臂连接器,手臂连接器靠近收卷辊一侧的侧壁上设有引线套,引线套内设有供动力绳穿过的线孔。引线套起到对动力绳限位的作用,避免动力绳与手臂连接器的机体直接接触产生摩擦,延长动力绳的使用寿命,保证机械手活动的顺畅性。
11.优选地,手臂连接器包括第一连接关节和第二连接关节,第一连接关节与机壳配定配合,第二连接关节和第一连接节之间连接有连接件,连接件包括中间齿轮,引线套固定
连接于中间齿轮中部并且引线套两端分别贯穿第二连接关节和第一连接关节,引线套靠近第一连接关节的一端卡接有卡环,中间齿轮与第二连接关节固定连接。
12.优选地,线孔两端均设为外大内小的喇叭状,使动力绳具有一定的摆动范围,避免引线套侧边对动力绳产生线性切割力。
13.优选地,收卷辊底边的高度与线孔的高度平齐,使缠绕在收卷辊上的动力绳引出端与线孔的高度基本平齐,利于将动力绳引入至线孔中,并且收卷和放卷时受到的阻力更小,保证动力绳收放卷时的顺畅性。
附图说明
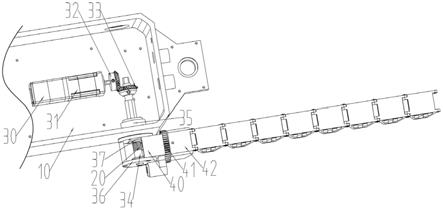
14.图1为本实用新型实施例的示意图;
15.图2为本实用新型实施例省略机壳和机械手的示意图;
16.图3为图2的俯视图;
17.图4为图3中a-a的剖视图。
18.说明书附图中的附图标记包括:机壳10、动力绳20、电机30、减速器31、第一锥齿轮32、第二锥齿轮33、收卷辊34、铜套35、侧板36、挡板37、第一连接关节40、中间齿轮41、第二连接关节42、引线套43、线孔44。
具体实施方式
19.将参照附图详细描述根据本实用新型的各个实施例。这里,需要注意的是,在附图中,将相同的附图标记赋予基本上具有相同或类似结构和功能的组成部分,并且将省略关于它们的重复描述。术语“依次包括a、b、c等”仅指示所包括的部件a、b、c等的排列顺序,并不排除在a和b之间和/或b和c之间包括其它部件的可能性。“第一”及其变体的描述仅仅是为了区分各部件,并不限制本实用新型的范围,在不脱离本实用新型的范围的情况下,“第一部件”可以写为“第二部件”等。
20.本说明书的附图为示意图,辅助说明本实用新型的构思,示意性地表示各部分的形状及其相互关系。
21.下面,参照图1-图4,详细描述根据本实用新型的优选实施方式。
22.本实施例提供了一种机械手收卷装置,包括机壳10、控制机械手弯曲的动力绳20以及收放动力绳20的驱动组件。此处,可弯曲机械手是指由多个关节依次铰接而成的机械手,可在驱动机构的作用下弯曲成不同幅度的状态,参见图1,本实施例示例性的提供了一种可弯曲的机械手,机械手每个关节均为倒梯形,使相邻两个关节之间均具有活动间隙,而相邻两个关节上端之间均通过连接销铰接,使关节可绕连接销转动至活动间隙内,而每个关节内均设有两个上下排列的穿孔。
23.其中,机壳10为机器人的重要组成部件,其用于安装电源、电机30、传动结构等内部结构,本实施例附图中只展示与收卷机构相关的组成部分。
24.参见图1和图2,驱动组件包括电机30和收卷辊34,电机30通过螺钉固定安装在机壳10内,电机30的输出轴上固定连接有第一锥齿轮32,由电机30驱动第一锥齿轮32转动。收卷辊34转动配合于机壳10上,具体地,机壳10侧壁上开设有通孔,通孔内通过螺钉固定连接有铜套35,收卷辊34通过轴孔配合的方式转动配合在铜套35内,收卷辊34左部位于机壳10
内,右部位于机壳10外侧。收卷辊34的左端通过螺钉固定连接有第二锥齿轮33,第二锥齿轮33与第一锥齿轮32啮合,使电机30驱动第一锥齿轮32转动时能够带动收卷辊34转动。
25.参见图1和图2,在一些实施例中,为了可以适应性改变收卷辊34的速度,本实施例中还在机壳10内设置有减速器31,减速器31连接于电机30与收卷辊34之间,具体地,减速器31输入端与电机30输出轴连接,第一锥齿轮32固定连接在减速器31的输出轴上。
26.参见图1,收卷辊34位于机壳10外侧的部分缠绕有动力绳20,动力绳20另一端依次穿过机械手各个关节上的穿孔并固定配合在最外端的关节上,收卷辊34对动力绳20进行收卷时能够带动机械手执行弯曲动作。
27.参见图2,在一些实施例中,收卷辊34远离第二锥齿轮33的一侧固定套接有两块圆形的挡板37,动力绳20缠绕于收卷辊34位于两块挡板37之间的部分。具体地,机壳10外侧通过螺钉固定连接有两块侧板36,两块挡板37均一体成型于收卷辊34位于机壳10外侧的部分上,并且两块挡板37均位于两块侧板36之间且分别抵在两块侧板36上。如此设置,使挡板37不仅具有聚拢动力绳20的作用,还具有对收卷辊34定位的作用,在安装过程中当挡板37与侧板36相抵时即实现对收卷辊34的定位。
28.参见图2和图4,在一些实施例中,机械手与收卷辊34之间设有手臂连接器,手臂连接器上设有引线套43,引线套43内设有供动力绳20穿过的线孔44。其中,手臂连接器包括第一连接关节40和第二连接关节42,第一连接关节40通过螺钉固定连接在两块侧板36右侧之间,第二连接关节42和第一连接关节10之间通过连接件连接。具体地,连接件包括中间齿轮41,第一连接关节40和第二连接关节42中部均开设有通孔,中间齿轮41中部一体成型有引线套43,且引线套43两端向外凸起并分别插入第一连接关节40和第二连接关节42的中部通孔中,引线套43左端卡接有卡环使引线套43无法脱离第一连接关节40,中间齿轮41通过螺钉与第二连接关节42固定连接使引线套43与第二连接关节42固定配合。
29.参见图4,在一些实施例中,线孔44两端均设为外大内小的喇叭状,使动力绳20具有一定的摆动范围,避免引线套43侧边对动力绳20产生切割力。并且,收卷辊34底边的高度与线孔44的高度平齐,使缠绕在收卷辊34上的动力绳20引出端与线孔44的高度基本平齐,利于将动力绳20引入至线孔44中,并且收卷和放卷时受到的阻力更小,保证动力绳20收放卷时的顺畅性。
30.基于上述方案,使用时,启动电机30通过减速器31将动力传递给第一锥齿轮32,由于第二锥齿轮33与第一锥齿轮32啮合,所以启动电机30会通过第一锥齿轮32和第二锥齿轮33带动收卷辊34转动,收卷辊34转动对动力绳20进行收卷或者放卷,收卷辊34收卷动力绳20时会带动机械手执行弯曲动作,机械手弯曲后收卷辊34再放卷动力绳20时机械手会在其自身的复位结构带动下恢复至初始状态。
31.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1