具可食用可生物降解自动化无人生产的冲切模具的制作方法
1.本实用新型是有关于一种冲切模具,尤指一种具可食用可生物降解自动化无人生产的冲切模具。
背景技术:
2.许多餐饮业者或者消费者为了节省餐具成本,通常都会选择购买一次性使用的免洗餐具,免洗餐具通常为塑料或纸类材质制成,虽然免洗餐具相较于可重复清洗使用的餐具而言,具有节省清洗餐具以及降低购买成本的功效;但是,制成免洗餐具的材质无法被生物降解,造成免洗餐具不会腐烂,容易产生垃圾堆积的问题,而且使用过的免洗餐具所形成的垃圾,若运用焚烧方式及掩埋方式处理,反而会严重导致环境污染,因而免洗餐具在回收处理上极为不易,导致严重的生态破坏及垃圾危害的问题。
3.目前全球每年生产3亿吨塑料,其中50%的塑料是一次性的,一次性塑料的下游处理不善造成有830万吨塑料流入海洋,而其中50%的海洋垃圾就是一次性塑料,在抽样统计中,废弃塑料餐具在各种海洋塑料垃圾中是名列前10的,大量的塑料颗粒在海洋中漂浮造成海洋生物误食,例如,在北太平洋,每年有12-14万吨塑料被鱼类误食,按照当前海洋中积累的塑料垃圾的接近指数的趋势,科学家预计到2050年,海洋中塑料垃圾的重量会比鱼类重量还要多。
4.目前替代石油基塑料是以生物基塑料为主,最具代表性的是聚乳酸(pla),但是能全降解的生物塑料是薄膜形式的聚羟基丁酸酯(phb)、叔丁基二甲基硅基(tbs),并且有机化学中物质的转换率不高。
5.另外就是竹/木/棕榈等纤维类产品,但是上游加工时会产生不少污染废水,而且加工时候的自动化率,成品率也是问题。
6.所以目前在同业尚未有完全能在各种环境包括野外能够自然环境降解的餐具,且更没有能够完全自动化生产自然环境降解的餐具的冲切模具,因此,确有加以改良的必要。
技术实现要素:
7.有鉴于自动化无人生产的冲切模具具有上述缺点,本实用新型提供一种具可食用可生物降解自动化无人生产的冲切模具,该具可食用可生物降解自动化无人生产的冲切模具包含:一切割模块、一底模以及一可食用可生物降解的连续面皮。其中该切割模块设有一上切割模以及一下切割模,该上切割模一端设于设备上,另一端设有一切割部,该下切割模于至中处设有一对应上切割模的切割部型态的成型凹槽,该其成型凹槽两侧设有一第一支撑部,该第一支撑部设于机械设备上;另该底模设有一上底模以及一下底模,该上底模对应下切割模的成型凹槽设置一汤勺型的凸压部,另于凸压部两侧设有一第二支撑部,且该凸压部上设有多个穿孔:该下底模设有一凹陷状的凹模部,该凹模部内另设有一汤勺形状的成型空间以及多个贯穿孔状的穿部。
8.作为优选,该流程动作为;供料:该可食用可生物降解所生产完成的连续面皮,其
连续面皮通过一辊轴系统性的带动,而辊轴带动会朝同一方向移动或是停止;吸附:该底模的下底模,该下底模上外环部多个贯穿的真空吸孔会吸紧连续面皮,其真空吸附时辊轴系统性的带动连续面皮为停止状态;裁切:一机械手臂上结合的该切割模块的上切割模,该上切割模对应于该底模的下底模的上方,该切割模块的上切割模通过机械手臂进行上下移动,该各真空吸孔吸紧连续面皮时,该辊轴系统性的带动连续面皮为停止状态,并且由机械手臂将该上切割模朝向该底模的下底模进行裁切成形勺形面胚餐具,并且通过该底模的下底模的成型空间内设有多个喷孔将勺形面胚餐具朝向该切割模块的上切割模上喷设,并由该切割模块的上切割模上多个真空吸附孔部平均吸取裁切成形勺形面胚餐具;摆放送料:其机械手上结合的该切割模块的上切割模上吸取裁切成形勺形面胚餐具,通过机械手臂平行位移送料至成型模具生产线;重复:完成挤压成形后该底模的下底模配合输送设备移动向前,其该连续面皮同时向前移动,并重复供料、切割及压合连续动作,通过上述结构配合连续流程动作进而达到自动化无人生产具可食用可生物降解的冲切模具。
9.作为优选,该切割部设为汤勺或刀或叉等餐具型态。
10.本实用新型还提供一种具可食用可生物降解自动化无人生产的冲切模具,该具可食用可生物降解自动化无人生产的冲切模具包含:一切割模块、一底模以及一可食用可生物降解的连续面皮。其中该切割模块设有一上切割模,该上切割模设有一切割部,该上切割模的切割部另一端由一机械手臂锁固定,并设有多个真空吸附孔部;另该底模设有一下底模,该下底模设有一外环部及一对应该上切割模的切割部设置一汤勺形状的成型空间,该外环部上多个贯穿的真空吸孔,该成型空间内设有多个喷孔。
11.作为优选,该流程动作为供料:该可食用可生物降解所生产完成的连续面皮,其连续面皮通过一辊轴系统性的带动,而辊轴带动会朝同一方向移动或是停止;吸附:该底模的下底模,该下底模上外环部多个贯穿的真空吸孔会吸紧连续面皮,其真空吸附时辊轴系统性的带动连续面皮为停止状态;裁切:一机械手臂上结合的该切割模块的上切割模,该上切割模对应于该底模的下底模的上方,该切割模块的上切割模通过机械手臂进行上下移动,该各真空吸孔吸紧连续面皮时,该辊轴系统性的带动连续面皮为停止状态,并且由机械手臂将该上切割模朝向该底模的下底模进行裁切成形勺形面胚餐具,并且通过该底模的下底模的成型空间内设有多个喷孔将勺形面胚餐具朝向该切割模块的上切割模上喷设,并由该切割模块的上切割模上多个真空吸附孔部平均吸取裁切成形勺形面胚餐具;摆放送料:其机械手上结合的该切割模块的上切割模上吸取裁切成形勺形面胚餐具,通过机械手臂平行位移送料至成型模具生产线;重复:完成挤压成形后该底模的下底模配合输送设备移动向前,其该连续面皮同时向前移动,并重复供料、吸附、裁切及摆放送料连续动作,通过上述结构配合连续流程动作进而达到自动化无人生产具可食用可生物降解的冲切模具。
12.作为优选,该切割部设为汤勺或刀或叉等餐具型态。
13.本实用新型还提供一种具可食用可生物降解自动化无人生产的冲切模具,该具可食用可生物降解自动化无人生产的冲切模具包含:一切割模块、一底模以及一可食用可生物降解的连续面皮。其中该切割模块设有一上切割模以及一下切割模,该上切割模一端设于设备上,另一端设有一凸块状的切割部,且该上切割模设有多个真空吸附的穿孔,另该下切割模于至中处设有一对应上切割模的切割部型态的成型凹槽,该凹槽远离上切割模一端面设为一波浪状的弧贴面;另该底模设有一下底模,该下底模对应下切割模的弧贴面设置
一波浪状的压贴部,另于压贴部上设有多个真空吸附的贯穿孔及多个贯穿喷射孔:该下底模设有一凹陷状的凹模部,该凹模部内另设有一汤勺形状的成型空间以及多个贯穿孔状的穿部。
14.作为优选,该切割部设为汤勺或刀或叉等餐具型态。
15.作为优选,该流程动作为;供料:该可食用可生物降解所生产完成的连续面皮,其连续面皮通过一辊轴系统性的带动,而辊轴带动会朝同一方向移动或是停止,其连续面皮停止时会形成松弛状态;吸附:当连续面皮移动至该下底模上方时,该压贴部上设有多个真空吸附的贯穿孔会先吸紧连续面皮一面,使连续面皮形成符合该下底模的压贴部曲面状态,辊轴系统性的带动连续面皮为停止状态;裁切:一机械手臂上结合该切割模块的上切割模,该上切割模的切割部供该下切割模的凹槽对应设置,并且对应于该底模设有一下底模的上方,该切割模块的上切割模通过机械手臂进行上下移动,该压贴部上设有多个真空吸附的贯穿孔会先吸紧连续面皮,该辊轴统性的带动连续面皮为停止状态,并且由该上切割模的切割部供该下切割模的凹槽朝向该底模设有一下底模进行裁切连续面皮成形勺形面胚餐具,并且通过该上切割模设有多个真空吸附的穿孔平均吸取裁切成形勺形面胚餐具;摆放送料:其机械手臂将上吸取裁切成形勺形面胚餐具的上切割模,通过机械手臂平行位移送料至成型模具生产在线;重复:配合输送设备移动向前,其该连续面皮同时向前移动,并重复供料、吸附、裁切及摆放送料连续动作,通过上述结构配合连续流程动作进而达到自动化无人生产具可食用可生物降解的冲切模具。
16.本实用新型具可食用可生物降解自动化无人生产的冲切模具的主要目的,在于其能够完全模块化及自动化生产的可食用可生物降解的餐具(刀、叉、汤勺等)。
附图说明
17.图1为本实用新型的流程动作图。
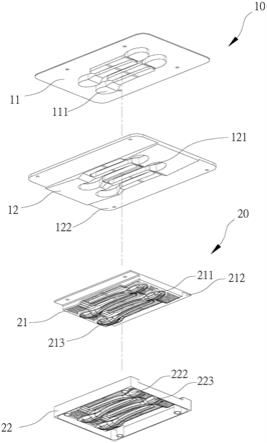
18.图2为本实用新型的立体分解图。
19.图3为本实用新型的第二立体分解图。
20.图4为图3的供料流程动作示意图。
21.图5为图3的切割成型流程动作示意图。
22.图6为本实用新型切割成型后餐具胚置放于下底模动作示意图。
23.图7为本实用新型成型压合第二动作示意图。
24.图8为本实用新型第一实施例流程动作图。
25.图9为本实用新型第一实施例供料流程动作示意图。
26.图10为本实用新型第一实施例吸附流程动作示意图。
27.图11为本实用新型第一实施例裁切流程动作示意图。
28.图12为本实用新型第一实施例摆放送料流程动作示意图。
29.图13为本实用新型第二实施例流程动作图。
30.图14为本实用新型第二实施例供料流程动作示意图。
31.图15为本实用新型第二实施例吸附流程动作示意图。
32.图16为本实用新型第二实施例裁切流程动作示意图。
33.图17为本实用新型第二实施例摆放送料流程动作示意图。
34.附图标记
35.切割模块10
36.上切割模11
37.切割部111
38.下切割模12
39.成型凹槽121
40.第一支撑部122
41.上切割模13
42.切割部131
43.真空吸附孔部132
44.上切割模14
45.切割部141
46.穿孔142
47.下切割模15
48.成型凹槽151
49.弧贴面152
50.底模20
51.上底模21
52.凸压部211
53.第二支撑部212
54.穿孔213
55.下底模22
56.凹模部221
57.成型空间222
58.穿部223
59.下底模23
60.外环部231
61.成型空间232
62.真空吸孔233
63.喷孔234
64.下底模24
65.压贴部241
66.贯穿孔242
67.贯穿喷射孔243
68.连续面皮30
69.供料a
70.切割b
71.压合c
72.重复d
73.供料e
74.吸附f
75.裁切g
76.摆放送料h
77.重复i
78.供料j
79.吸附k
80.裁切l
81.摆放送料m
82.重复n
具体实施方式
83.以下兹配合本实用新型较佳实施例的图式进一步说明如下,以期能使本领域技术人员,可依本说明书的陈述据以实施。
84.首先,请配合参阅图1至图7所示,本实用新型具可食用可生物降解自动化无人生产的冲切模具,其中该冲切模具包含:一切割模块10、一底模20以及一可食用可生物降解的连续面皮30。
85.其中该切割模块10设有一上切割模11以及一下切割模12,该上切割模11一端设于设备上,另一端设有一切割部111,该切割部111型态设为一汤勺状态形体(该切割部111另也可设为刀、叉等餐具型态),该下切割模12于至中处设有一对应上切割模11的切割部111型态的成型凹槽121,该其成型凹槽121两侧设有一第一支撑部122,该第一支撑部122设于机械设备上;
86.另该底模20设有一上底模21以及一下底模22,该上底模21对应下切割模12的成型凹槽121设置一汤勺型的凸压部211,另于凸压部211两侧设有一第二支撑部212,且该凸压部211上设有多个穿孔213:
87.该下底模22设有一凹陷状的凹模部221,该凹模部221内另设有一汤勺形状的成型空间222以及多个贯穿孔状的穿部223。
88.其具可食用可生物降解自动化无人生产的冲切模具的流程动作图请参考图1所示;
89.供料a:该可食用可生物降解所生产完成的连续面皮30,其连续面皮30通过一辊轴系统性的带动,而辊轴带动会朝同一方向移动或是停止;
90.切割b:连续面皮30随着辊轴系统性的移动在该切割模块10的上切割模11以及下切割模12之间,通过该切割模块10的上切割模11的切割部111向下切割模12的成型凹槽121一端移动而连续面皮30被裁切形成勺形面胚,切断后勺形面胚通过下切割模12的成型凹槽121掉落到该底模20的下底模22的成型空间222上后,该切割模块10的上切割模11会朝上复位,该底模20的下底模22就配合输送设备移动向前,其该连续面皮30同时向前移动;
91.压合c:另该底模20的下底模22配合输送设备移动后会对应该上底模21的凸压部211下方,该上底模21的凸压部211会朝向下底模22向下压合将勺形面胚挤压固定于下底模22成型空间222内;
92.重复d:完成挤压成形后该上底模21会朝上复位,该下底模22就配合输送设备移动向前,其该连续面皮30同时向前移动,并重复(供料a)、(切割b)及(压合c)连续动作,通过上述结构配合连续流程动作进而达到自动化无人生产具可食用可生物降解的冲切模具。
93.另请参考如图8至图12所示,其包含:一切割模块10、一底模20以及一可食用可生物降解的连续面皮30。
94.其中该切割模块10设有一上切割模13,该上切割模13设有一切割部131,该切割部131型态设为一汤勺状态形体(另外可设为刀、叉等餐具型态),该上切割模13的切割部131另一端由一机械手臂锁固定,并设有多个真空吸附孔部132;
95.另该底模20设有一下底模23,该下底模23设有一外环部231以及一对应该上切割模13的切割部131设置一汤勺形状的成型空间232,该外环部231上多个贯穿的真空吸孔233,该成型空间232内设有多个喷孔234。
96.其具可食用可生物降解自动化无人生产的冲切模具的流程动作图请参考图8所示;
97.供料e:该可食用可生物降解所生产完成的连续面皮30,其连续面皮30通过一辊轴系统性的带动,而辊轴带动会朝同一方向移动或是停止;
98.吸附f:该底模20的下底模23,该下底模23上该外环部多个贯穿的真空吸孔233会吸紧连续面皮30,其真空吸附时辊轴系统性的带动连续面皮30为停止状态;
99.裁切g:一机械手臂上结合的该切割模块10的上切割模13,该上切割模13对应于该底模20的下底模23的上方,该切割模块10的上切割模13通过机械手臂进行上下移动,该各真空吸孔233吸紧连续面皮30时,该辊轴系统性的带动连续面皮为停止状态,并且由机械手臂将该上切割模13朝向该底模20的下底模23进行裁切成形勺形面胚餐具,并且通过该底模20的下底模23的成型空间232内设有多个喷孔234将勺形面胚餐具朝向该切割模块10的上切割模13上喷设,并由该切割模块10的上切割模13上多个真空吸附孔部132平均吸取裁切成形勺形面胚餐具;
100.摆放送料h:其机械手上结合的该切割模块10的上切割模13上吸取裁切成形勺形面胚餐具,通过机械手臂平行位移送料至成型模具生产线;
101.重复i:完成挤压成形后该底模20的下底模23配合输送设备移动向前,其该连续面皮30同时向前移动,并重复(供料e)、(吸附f)、(裁切g)及(摆放送料h)连续动作,通过上述结构配合连续流程动作进而达到自动化无人生产具可食用可生物降解的冲切模具。
102.另请参考如图13至图17所示,其包含:一切割模块10、一底模20以及一可食用可生物降解的连续面皮30。
103.其中该切割模块10设有一上切割模14以及一下切割模15,该上切割模14一端设于设备上,另一端设有一凸块状的切割部141,该切割部141型态设为一叉状态形体(该切割部141另也可设为刀、汤勺等餐具型态),且该上切割模14设有多个真空吸附的穿孔142,另该下切割模15于至中处设有一对应上切割模14的切割部141型态的成型凹槽151,该成型凹槽151远离上切割模14一端面设为一波浪状的弧贴面152;
104.另该底模20设有一下底模24,该下底模21对应下切割模15的弧贴面152设置一波浪状的压贴部241,另于压贴部241上设有多个真空吸附的贯穿孔242及多个的贯穿喷射孔243。
105.其具可食用可生物降解自动化无人生产的冲切模具的流程动作图请参考图13所示;
106.供料j:该可食用可生物降解所生产完成的连续面皮30,其连续面皮30通过一辊轴系统性的带动,而辊轴带动会朝同一方向移动或是停止,其连续面皮30停止时会形成松弛状态;
107.吸附k:当连续面皮30移动至该下底模22上方时,该压贴部241上设有多个真空吸附的贯穿孔242会先吸紧连续面皮30一面,使连续面皮30形成符合该下底模22的压贴部241曲面状态,辊轴系统性的带动连续面皮30为停止状态;
108.裁切l:一机械手臂上结合该切割模块102的上切割模14,该上切割模14的切割部141供该下切割模15的成型凹槽151对应设置,并且对应于该底模20设有一下底模24的上方,该切割模块10的上切割模14通过机械手臂进行上下移动,该压贴部241上设有多个真空吸附的贯穿孔242会先吸紧连续面皮30,该辊轴系统性的带动连续面皮30为停止状态,并且由该上切割模14的切割部141供该下切割模15的成型凹槽151朝向该底模20设有一下底模24进行裁切连续面皮30成形勺形面胚餐具,并且通过该上切割模14设有多个真空吸附的穿孔142平均吸取裁切成形勺形面胚餐具;
109.摆放送料m:其机械手臂将上吸取裁切成形勺形面胚餐具的上切割模14,通过机械手臂平行位移送料至成型模具生产线;
110.重复n:配合输送设备移动向前,其该连续面皮30同时向前移动,并重复(供料j)、(吸附k)、(裁切l)及(摆放送料m)连续动作,通过上述结构配合连续流程动作进而达到自动化无人生产具可食用可生物降解的冲切模具。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1