一种改进型三坐标直线模组搬运机械手的制作方法
1.本实用新型涉及机械手搬运技术领域,具体涉及一种改进型三坐标直线模组搬运机械手。
背景技术:
2.机械手是能模仿人手臂的某些动作功能并用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手可代替人的繁重老的以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,广泛应用于机械制造、冶金、轻工等部门。
3.公开号cn106140531b涉及一种轮毂喷粉工序转换三坐标平移机械手装置,包括主框架、安装在所述主框架上的移动组件和与移动组件连接的抓取组件,移动组件包括可以带动抓取组件做左右运动的x向移动组件、可以带动抓取组件做纵向运动的y向移动组件、可以带动抓取组件做上下运动的z向移动组件,抓取组件包括机械手爪、随动机构,随动机构可带动机械手爪在水平面获得一定运动以克服轮毂定位误差;平移机械手装置还包括自动识别装置、电气控制装置、报警系统,自动识别装置包括识别轮毂装置、识别托盘装置;抓取(夹持)部位为轮毂的中心孔,在机械手爪上部安装有随动机构,通过控制定位锁紧气动缸,可在水平面内获得一定的运动,以克服轮毂定位误差,但是该三坐标平移机械手装置运行时不稳定振幅大,三坐标的移动组件平行度差,无法进行调节。因此,亟需本领域技术人员研究出一种改进型的三坐标直线模组搬运机械手。
技术实现要素:
4.本实用新型的目的是为了解决上述现有技术中存在的不足,提供了一种运行稳定振幅小、易于调平、安装简便的改进型三坐标直线模组搬运机械手。
5.为了达到上述实用新型目的,本实用新型提供的技术方案如下:一种改进型三坐标直线模组搬运机械手,包括固定支架、y轴直线导轨模组、设置于y轴直线导轨模组上的x轴直线导轨模组以及设置于x轴直线导轨模组上的z轴直线导轨模组,所述固定支架上设置有配重板,所述y轴直线导轨模组适配地设置于配重板上,所述固定支架与配重板之间还设置有调平板,所述调平板位于固定支架上端面四角处,所述调平板上分布有固定孔和调平孔,所述固定孔与固定支架或配重板相互固定,所述调平孔上适配地设置有调平螺栓,相互平行的y轴直线导轨模组适配地设置于配重板上。
6.进一步的,所述固定支架包括型材件、紧固件和直角固定件,所述型材件之间通过紧固件适配连接,所述直角固定件固定于型材件之间构成的直角处。
7.进一步的,所述配重板为平面框体结构,所述配重板采用长度560mm、宽度560mm、厚度15mm的钢板。
8.进一步的,所述调平板采用厚度为15mm的钢板。
9.进一步的,所述z轴直线导轨模组包括与x轴直线导轨模组适配连接的z轴固定后板、设置于z轴固定后板一侧的z轴固定前板、设置于z轴固定前板上的z轴直线导轨,所述z
轴直线导轨上端设置有连接板,所述连接板一侧设置有电机固定件。
10.进一步的,所述y轴直线导轨模组包括一位于其下端的底座固定件,所述底座固定件分别与y轴直线导轨模组及配重板固连。
11.进一步的,所述底座固定件的上半部分设置有y轴直线导轨模组固定槽,所述底座固定件的下半部分设置有配重板固定槽,所述y轴直线导轨模组固定槽的槽壁上还设置有与y轴直线导轨模组固连的第一安装孔,所述配重板固定槽的槽壁上还设置有与配重板固连的第二安装孔。
12.与现有技术相比,本实用新型具有如下有益效果:
13.1、本实用新型改进型三坐标直线模组搬运机械手,安装简便,通过设置配重板和调平板,配重板可以起到稳定三坐标直线模组的作用,调平板具有调平速度快、操作方便,平行度高,一定程度上保证机械手运行稳定振幅小;
14.2、型材件之间通过紧固件连接,直角固定件固定于型材件之间构成的直角处,装配快捷方便,稳定性强,固定牢靠;
15.3、y轴直线导轨模组包括一位于其下端的底座固定件,底座固定件分别与y轴直线导轨模组及配重板固连,底座固定件的上半部分设置有y轴直线导轨模组固定槽,底座固定件的下半部分设置有配重板固定槽,y轴直线导轨模组固定槽的槽壁上还设置有与y轴直线导轨模组固连的第一安装孔,配重板固定槽的槽壁上还设置有与配重板固连的第二安装孔,装配牢靠,结构稳定。
附图说明
16.图1为本实用新型改进型三坐标直线模组搬运机械手的立体图。
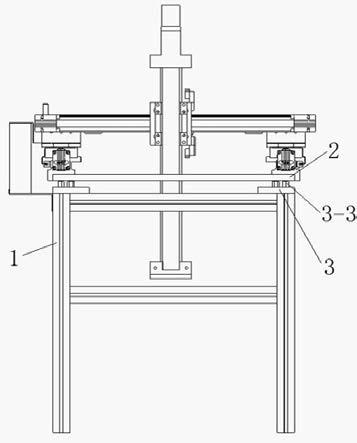
17.图2为本实用新型改进型三坐标直线模组搬运机械手的侧面图。
18.图3为本实用新型调平板的立体图。
19.图4为本实用新型配重板的立体图。
20.图5为本实用新型固定支架的分解示意图。
21.图6为本实用新型z轴直线导轨模组的立体图。
22.图7为本实用新型底座固定件的主视图。
23.图8为本实用新型底座固定件的右视图。
24.图9为本实用新型底座固定件的仰视图。
25.图中:1.固定支架,1-1.型材件,1-2.紧固件,1-3.直角固定件,2.配重板,3.调平板,3-1.固定孔,3-2.调平孔,3-3.调平螺栓,4.y轴直线导轨模组,4-1.底座固定件,4-2.y轴直线导轨模组固定槽,4-3.配重板固定槽,4-4.第一安装孔,4-5.第二安装孔,5.x轴直线导轨模组,6.z轴直线导轨模组,6-1.z轴固定后板,6-2.z轴固定前板,6-3.z轴直线导轨,6-4.连接板,6-5.电机固定件。
具体实施方式
26.下面结合附图和实施例对本实用新型作进一步的解释说明。
27.如图1-图6所示,一种改进型三坐标直线模组搬运机械手,包括固定支架1、设置于固定支架1上的y轴直线导轨模组4、设置于y轴直线导轨模组4上的x轴直线导轨模组5以及
设置于x轴直线导轨模组5上的z轴直线导轨模组6,固定支架1上设置有配重板2,y轴直线导轨模组4适配地设置于配重板2上,固定支架1与配重板2之间还设置有调平板3,调平板3位于固定支架1上端面四角处,调平板3上分布有固定孔3-1和调平孔3-2,固定孔3-1与固定支架1或配重板2相互固定,调平孔3-2上适配地设置有调平螺栓3-3,相互平行的y轴直线导轨模组4适配地设置于配重板2上。
28.固定支架1包括型材件1-1、紧固件1-2、直角固定件1-3,型材件1-1之间通过紧固件1-2适配连接,直角固定件1-3固定于型材件1-1之间构成的直角处。配重板2为平面框体结构,配重板2采用长度560mm、宽度560mm、厚度15mm的钢板。调平板3采用厚度为15mm的钢板。z轴直线导轨模组6包括与x轴直线导轨模组5适配连接的z轴固定后板6-1、设置于z轴固定后板6-1一侧的z轴固定前板6-2、设置于z轴固定前板6-2上的z轴直线导轨6-3,z轴直线导轨6-3上端设置有连接板6-4,连接板6-4一侧设置有电机固定件6-5。y轴直线导轨模组4包括一位于其下端的底座固定件4-1,底座固定件4-1分别与y轴直线导轨模组4及配重板2固连。
29.如图7-图9所示,底座固定件4-1的上半部分设置有y轴直线导轨模组固定槽4-2,底座固定件4-1的下半部分设置有配重板固定槽4-3,y轴直线导轨模组固定槽4-2的槽壁上还设置有与y轴直线导轨模组4固连的第一安装孔4-4,配重板固定槽4-3的槽壁上还设置有与配重板2固连的第二安装孔4-5。
30.本实用新型改进型三坐标直线模组搬运机械手的安装过程如下:将型材件1-1通过紧固件1-2安装组配,再通过直角固定件1-3固定于型材件1-1之间构成的直角处,形成固定支架1;再把调平板3安装在固定支架1上端面的四角处,并安装调平螺栓3-3,配重板2放置在调平螺栓3-3上进行水平调平,调平完成后安装固定螺母进行固定。再将y轴直线导轨模组4、x轴直线导轨模组5以及z轴直线导轨模组6进行安装,并在z轴直线导轨模组6上安装末端机械手。
31.上述内容为本实用新型的示例及说明,但不意味着本实用新型可取得的优点受此限制,凡是本实用新型实践过程中可能对结构的简单变换、和/或一些实施方式中实现的优点的其中一个或多个均在本技术的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1