一种抱管夹具的制作方法
1.本实用新型涉及夹具领域,尤其是涉及一种抱管夹具。
背景技术:
2.油气管道铺设过程中,经常需要使用抱管夹具抱紧管道并实施对管道的转运,现有的抱管夹具仅包括有一个抱抓组件,其抱紧效果不佳,管道被抱紧后容易倾斜、滑落。
技术实现要素:
3.为了解决上述技术问题中的至少一个,本实用新型提供了一种抱管夹具,其具体技术方案如下:
4.一种抱管夹具,包括连接法兰、回转驱动机构、连接支架、抱抓架、第一抱抓组件及第二抱抓组件,其中:
5.所述回转驱动机构连接在所述连接法兰上;
6.所述连接支架连接在所述回转驱动机构的驱动端上,所述回转驱动机构用于带动所述连接支架转动;
7.所述抱抓架连接在所述连接支架的下方;
8.所述第一抱抓组件安装在所述连接支架的第一端,所述第二抱抓组安装在所述连接支架的第二端。
9.在一些实施例中,所述抱抓架可转动地连接在所述连接支架上;所述抱管夹具还包括第一偏转油缸和第二偏转油缸,其中:所述第一偏转油缸的缸体铰接在所述连接支架上,所述第一偏转油缸的伸缩杆铰接在所述抱抓架并靠近所述第一抱抓组件;所述第二偏转油缸的缸体铰接在所述连接支架上,所述第二偏转油缸的伸缩杆铰接在所述抱抓架并靠近所述第二抱抓组件。
10.在一些实施例中,所述第二抱抓组件均包括成对设置的第一抱爪和第二抱爪,所述第一抱爪和第二抱爪被配置为能够向中间抱紧及向两边张开。
11.在一些实施例中,所述第一抱爪、所述第二抱爪均包括:安装支架,所述安装支架连接在所述抱抓架的端部,所述安装支架上设置有主驱动油缸;主抱爪件,所述主抱爪件的上端经主转轴转动连接在所述安装支架上并与所述主驱动油缸的驱动端连接,所述主抱爪件上还设置有副驱动油缸;副抱爪件,所述副抱爪件的上端经副转轴转动连接在所述主抱爪件的下端并与所述副驱动油缸的驱动端连接;所述主驱动油缸用于驱动所述主抱爪件转动,所述副驱动油缸用于驱动所述副抱爪件转动。
12.在一些实施例中,所述第一抱抓组件和所述第二抱抓组件均包括感应件,所述感应件与所述主驱动油缸、所述副驱动油缸的控制端信号连接。
13.在一些实施例中,所述感应件包括设置在所述抱抓架的端部并位于所述第一抱爪、所述第二抱爪之间的接近传感器。
14.在一些实施例中,所述感应件包括激光发射器及激光探测器,其中,所述激光发射
器设置在所述第一抱爪上,所述激光探测器设置在所述第二抱爪上。
15.本实施例提供的抱管夹具,其设置有两组抱抓组件,通过两组抱抓组件的配合抱抓,能够提升对管道的抱抓力度及抱抓稳定性,防止管道倾斜、滑落。此外,通过回转驱动机构的驱动,本实施新型能够带动被抱抓的管道转动,从而实现对管道的角度调整。
附图说明
16.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要实用的附图作简单地介绍、显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中,
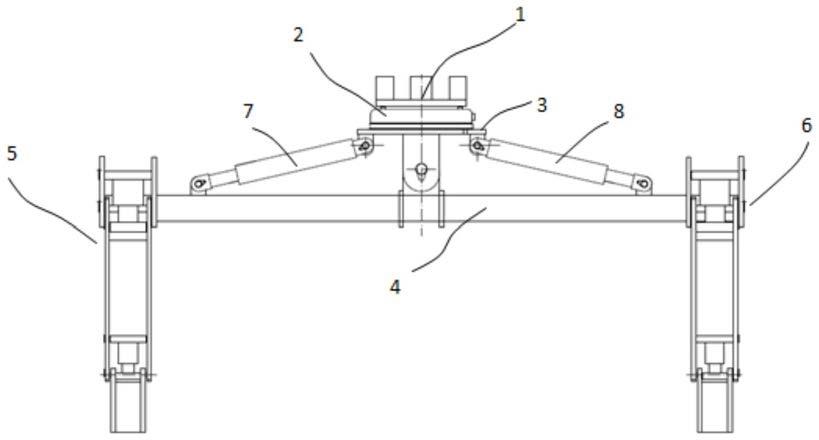
17.图1为本实用新型的抱管夹具的主视图;
18.图2为本实用新型的抱管夹具的仰视图;
19.图3为本实用新型的抱管夹具的左视图;
20.图4为本实用新型的抱管夹具的第一抱抓组件的结构示意图;
21.图1至3中包括:连接法兰1、回转驱动机构2、连接支架3、抱抓架4、第一抱抓组件5、第二抱抓组件6、第一抱爪51、第二抱爪52、安装支架511、主抱爪件512、副抱爪件513、主驱动油缸514、副驱动油缸515、主转轴516、副转轴517。
具体实施方式
22.为使本实用新型的上述目的、特征和优点、能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
23.现有的抱管夹具仅包括有一个抱抓组件,其抱紧效果不佳,管道被抱紧后容易倾斜、滑落。
24.鉴于此,本实用新型提供了一种抱管夹具。如图1和图2所示,本实用新型提供的抱管夹具包括连接法兰1、回转驱动机构2、连接支架3、抱抓架4、第一抱抓组件5及第二抱抓组件6,其中:
25.回转驱动机构2连接在连接法兰1上。
26.连接支架3连接在回转驱动机构2的驱动端上,回转驱动机构2用于带动连接支架3转动。
27.抱抓架4连接在连接支架3的下方。
28.第一抱抓组件5安装在连接支架3的第一端,第二抱抓组6安装在连接支架3的第二端。
29.经连接法兰1可以将本实用新型的抱管夹具安装至作业车辆的吊臂上,由吊臂驱动抱管夹具移动。
30.本实用新型的抱管夹具的工作过程如下:
31.吊臂将抱管夹具整体移动至待抱抓的管道处。
32.回转驱动机构2驱动抱抓架4转动,使得第一抱抓组件5及第二抱抓组件6 均对准管道。紧接着,控制第一抱抓组件5、第二抱抓组件6执行抱抓动作,从而实现对管道的抱抓。
33.吊臂将抱管夹具、管道移动至目标位置,同步的,回转驱动机构2驱动抱抓架4转动
以将管道调整至预定角度。
34.可见,通过两组抱抓组件的配合抱抓,本实用新型能够提升对管道的抱抓力度及抱抓稳定性,防止管道倾斜、滑落。此外,通过回转驱动机构的驱动,本实施新型能够带动被抱抓的管道转动,从而实现对管道的角度调整。
35.可选的,如图1所示,抱抓架4可转动地连接在连接支架3上。本实用新型的抱管夹具还包括第一偏转油缸7和第二偏转油缸8,其中:第一偏转油缸7 的缸体铰接在连接支架3上,第一偏转油缸7的伸缩杆铰接在抱抓架4并靠近第一抱抓组件5。第二偏转油缸8的缸体铰接在连接支架3上,第二偏转油缸8 的伸缩杆铰接在抱抓架4并靠近第二抱抓组件6。
36.通过第一偏转油缸7和第二偏转油缸8的配合,本实施新型能够实施对抱抓架4的在竖直方向上的倾斜度的调整。如,当第一偏转油缸7的伸缩杆伸出时,抱抓架4的第一端在第一偏转油缸7的伸缩杆的推动下向下倾斜转动,而当第一偏转油缸7的伸缩杆回缩时,抱抓架4的第一端在转油缸7的伸缩杆的牵拉下向上倾斜转动。
37.如图3所示,第一抱抓组件5和第二抱抓组件6均包括成对设置的第一抱爪51和第二抱爪52,第一抱爪51和第二抱爪52被配置为能够向中间抱紧及向两边张开,从而实施对管道的抱抓及释放。
38.如图4所示,可选的,第一抱爪51、第二抱爪52均包括:安装支架511、主抱爪件512及抱爪件513、其中:
39.安装支架511连接在抱抓架4的端部,安装支架511上设置有主驱动油缸 514。主抱爪件512的上端经主转轴516转动连接在安装支架511上并与主驱动油缸514的驱动端连接,主抱爪件512上设置有副驱动油缸515。副抱爪件513 的上端经副转轴517转动连接在主抱爪件512的下端并与副驱动油缸515的驱动端连接。主驱动油缸514用于驱动主抱爪件512转动,副驱动油缸515用于驱动副抱爪件513转动。
40.第一抱爪51、第二抱爪52对管道的抱抓过程如下:
41.初始状态下,第一抱爪51、第二抱爪52的主抱爪件512、副抱爪件513均处于松弛状态。
42.当需要抱抓管道时,通过控制第一抱爪51、第二抱爪52移动,使得管道穿入至第一抱爪51、第二抱爪52之间。
43.接着,第一抱爪51、第二抱爪52的主驱动油缸514同步驱动对应的主抱爪件512朝向管道转动,第一抱爪51、第二抱爪52的主抱爪件512从两侧抱紧管道。
44.紧接着,第一抱爪51、第二抱爪52的副驱动油缸515同步驱动对应的副抱爪件513朝向管道转动,第一抱爪51、第二抱爪52的副抱爪件513从下方抱紧、兜住管道的底部。
45.可见,通过第一抱爪51、第二抱爪52的配合,第一抱抓组件5和第二抱抓组件6能够实施对管道的稳定抱抓。
46.可选的,为了实施对管道的自动抱紧,第一抱抓组件5和所述第二抱抓组件6均包括感应件,感应件与主驱动油缸514、副驱动油缸515的控制端信号连接。当管道进入至第一抱抓组件5、第二抱抓组件6中时,感应件能够产生到位感应信号,主驱动油缸514、副驱动油缸515收到到位感应信号后即能驱动主抱爪件512、副抱爪件513自动执行抱抓动作。
47.在一些实施例中,感应件为设置在抱抓架4的端部并位于第一抱爪51、第二抱爪5之间的接近传感器。管道穿入至第一抱爪51、第二抱爪52之间时,接近传感器即可产生一接
近信号,该接近信号即为到位感应信号。
48.在另一些实施例中,感应件包括激光发射器及激光探测器,其中,激光发射器设置在第一抱爪51上,激光探测器设置在第二抱爪52上。当管道穿入至第一抱爪51、第二抱爪52之间时,激光发射器和激光探测器之间的光路被隔断,激光探测器产生隔断感应信号(如一低电平),该隔断感应信号即为位感应信号。
49.上文对本实用新型进行了足够详细的具有一定特殊性的描述。所属领域内的普通技术人员应该理解,实施例中的描述仅仅是示例性的,在不偏离本实用新型的真实精神和范围的前提下做出所有改变都应该属于本实用新型的保护范围。本实用新型所要求保护的范围是由所述的权利要求书进行限定的,而不是由实施例中的上述描述来限定的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1