电站智能巡检机器人的制作方法
1.本实用新型涉及机器人领域,尤其涉及一种电站智能巡检机器人。
背景技术:
2.现在许多地方都建设有太阳能电站,为了保证电站能够安全稳定地运行,需要定期对太阳能电站进行巡检,目前对太阳能电站进行巡检的方式是工人人工巡检,但是由于太阳能电站的面积都比较大,所以人工巡检劳动强度高,容易出现纰漏。
技术实现要素:
3.本实用新型针对上述问题,提出了一种电站智能巡检机器人。
4.本实用新型采取的技术方案如下:
5.一种电站智能巡检机器人,包括移动车、控制主机、电控机械臂、红外温度传感器、摄像头、电动伸缩臂以及夹爪,所述控制主机安装在移动车上,所述电控机械臂安装在移动车上,所述红外温度传感器以及摄像头均安装在电控机械臂上,所述红外温度传感器、摄像头及电控机械臂均与所述控制主机电连接,所述夹爪安装在电动伸缩臂上,所述电动伸缩臂安装在移动车上,所述电动伸缩臂与控制主机电连接。
6.本种巡检机器人中,在移动车上安装了红外传感器以及摄像头,摄像头可以事实获取设备的状况,如设备出现锈蚀等现象可以及时将信息传递给控制主机,控制主机获取信息将信息传递给控制中心,控制中心的工作人员可以根据摄像头获取的画面判定设备是否需要进行跟换维修,红外传感器是为了获取设备的温度,从而判断设备是否处于异常发热发热状态,帮助巡检中心的人及时排除安全隐患。同时对于小动物多的地区的太阳能电站,小动物会在设备上筑巢(窝),这些巢窝的存在会对设备造成极大的安全隐患,所以在移动车上加装电动伸缩臂,并且在电动伸缩臂上加装夹爪,利用电动伸缩臂上夹爪破坏动物(鸟类以及兔子等)的巢窝,从而驱离动物,避免动物破坏设备。
7.可选的,所述夹爪包括安装板、电缸以及三个夹连杆,三个夹连杆安装在安装板上,所述电缸安装在电动伸缩臂上,所述电缸与三个夹连杆配合在一起,所述电缸用于驱动夹连杆运动,所述电缸与控制主机电连接。
8.利用电缸驱动夹连杆运动,可以实现驱动连杆运动,从而利用连杆的力量夹碎动物的巢窝。
9.可选的,还包括软胶块,所述软胶块转动安装在夹连杆上,每个夹连杆上均安装有一块软胶块。
10.设置软胶块,利用软胶块与动物的巢窝接触,软胶块在挤碎动物巢穴的时候,会先与巢穴接触,软胶块发生挤压形变,且变形时会使得巢穴开裂,这样就起到了缓冲的作用,如巢窝内有动物时,动物有足够的时间逃离,避免破碎巢窝的过程中伤害动物,实现毁坏巢窝而不伤害动物。
11.具体软胶块可以是橡胶块,也可以是硅胶块。
12.可选的,还包括转动底盘,所述电控机械臂安装在转动底盘上,所述转动底盘安装在移动车上。
13.转动底盘的作用是带动电控机械臂进行转动。
14.可选的,所述移动车为履带式电动力履带车,履带车内设置有动力电机,所述动力电机与控制主机电连接。
15.可选的,所述控制主机内设置有无线通信模块,所述无线通信模块上接有天线,天线安装在移动车上。
16.无线通信模块与天线的作用是进行通信,保证控制主机内外的数据传输。
17.可选的,所述移动车上安装有液体传感器,所述液体传感器与控制主机电连接。
18.可选的,所述液体传感器位于控制主机与大地的地面之间。
19.设置液体传感器,且液体传感器位于控制主机与大地的地面之间,这样是为了对控制主机起到保护作用,液体传感器可以检测前进方向上的水深,这样的设计可以保证在地面积水达到一定值时,避免整个巡检机器人涉水前行导致控制主机浸水坏损。
20.具体控制主机可以是一台自带蓄电池的电脑。
21.本实用新型的有益效果是:在移动车上安装了红外传感器、夹爪以及摄像头,可以对电站的设备进行锈蚀情况以及工作状态进行实时巡检,巡检效率高,在巡检过程中可以驱离动物。
附图说明:
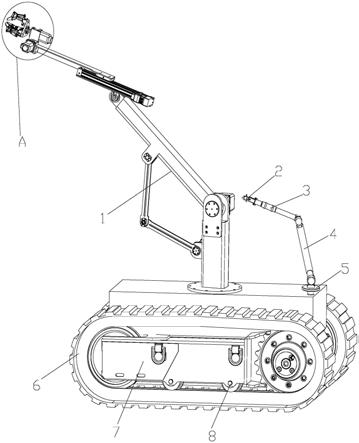
22.图1是电站智能巡检机器人示意简图;
23.图2是图1中a处的放大示意简图。
24.图中各附图标记为:1、电动伸缩臂;2、红外温度传感器;3、摄像头;4、电控机械臂;5、转动底盘;6、移动车;7、控制主机;8、液体传感器;901、软胶块;902、夹连杆;903、安装板;904、电缸。
具体实施方式:
25.下面结合各附图,对本实用新型做详细描述。
26.如附图1及附图2所示,一种电站智能巡检机器人,包括移动车6、控制主机7、电控机械臂4、红外温度传感器2、摄像头3、电动伸缩臂1以及夹爪,控制主机7安装在移动车6上,电控机械臂4安装在移动车6上,红外温度传感器2以及摄像头3均安装在电控机械臂4上,红外温度传感器2、摄像头3及电控机械臂4均与控制主机7电连接,夹爪安装在电动伸缩臂1上,电动伸缩臂1安装在移动车6上,电动伸缩臂1与控制主机7电连接。
27.本种巡检机器人中,在移动车6上安装了红外传感器以及摄像头3,摄像头3可以事实获取设备的状况,如设备出现锈蚀等现象可以及时将信息传递给控制主机7,控制主机7获取信息将信息传递给控制中心,控制中心的工作人员可以根据摄像头3获取的画面判定设备是否需要进行跟换维修,红外传感器是为了获取设备的温度,从而判断设备是否处于异常发热发热状态,帮助巡检中心的人及时排除安全隐患。同时对于小动物多的地区的太阳能电站,小动物会在设备上筑巢(窝),这些巢窝的存在会对设备造成极大的安全隐患,所以在移动车6上加装电动伸缩臂1,并且在电动伸缩臂1上加装夹爪,利用电动伸缩臂1上夹
爪破坏动物(鸟类以及兔子等)的巢窝,从而驱离动物,避免动物破坏设备。
28.如附图1及附图2所示,夹爪包括安装板903、电缸904以及三个夹连杆902,三个夹连杆902安装在安装板903上,电缸904安装在电动伸缩臂1上,电缸904与三个夹连杆902配合在一起,电缸904用于驱动夹连杆902运动,电缸904与控制主机7电连接。
29.利用电缸904驱动夹连杆902运动,可以实现驱动连杆运动,从而利用连杆的力量夹碎动物的巢窝。
30.如附图1及附图2所示,还包括软胶块901,软胶块901转动安装在夹连杆902上,每个夹连杆902上均安装有一块软胶块901。
31.设置软胶块901,利用软胶块901与动物的巢窝接触,软胶块901在挤碎动物巢穴的时候,会先与巢穴接触,软胶块901发生挤压形变,且变形时会使得巢穴开裂,这样就起到了缓冲的作用,如巢窝内有动物时,动物有足够的时间逃离,避免破碎巢窝的过程中伤害动物,实现毁坏巢窝而不伤害动物。
32.具体软胶块901可以是橡胶块,也可以是硅胶块。
33.如附图1及附图2所示,还包括转动底盘5,电控机械臂4安装在转动底盘5上,转动底盘5安装在移动车6上。
34.转动底盘5的作用是带动电控机械臂4进行转动。
35.如附图1及附图2所示,移动车6为履带式电动力履带车,履带车内设置有动力电机,动力电机与控制主机7电连接。
36.如附图1及附图2所示,控制主机7内设置有无线通信模块,无线通信模块上接有天线,天线安装在移动车6上。
37.无线通信模块与天线的作用是进行通信,保证控制主机7内外的数据传输。
38.如附图1及附图2所示,移动车6上安装有液体传感器8,液体传感器8与控制主机7电连接。
39.如附图1及附图2所示,液体传感器8位于控制主机7与大地的地面之间。
40.设置液体传感器8,且液体传感器8位于控制主机7与大地的地面之间,这样是为了对控制主机7起到保护作用,液体传感器8可以检测前进方向上的水深,这样的设计可以保证在地面积水达到一定值时,避免整个巡检机器人涉水前行导致控制主机7浸水坏损。
41.具体控制主机7可以是一台自带蓄电池的电脑。
42.以上所述仅为本实用新型的优选实施例,并非因此即限制本实用新型的专利保护范围,凡是运用本实用新型说明书所作的等效变换,直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1