多功能自动导航医用机器人
1.本实用新型涉及医用机器人技术领域,尤其是一种多功能自动导航医用机器人。
背景技术:
2.近年来,机器人技术的研究和实践处于快速持续发展的阶段。随着机器人硬件成本日趋下降,及支撑机器人研究与开发的关键技术(如高性能计算、大数据、云计算、人工智能等)快速发展,机器人核心产业从工业制造 (如焊接、刷漆、组装、采集和放置等)等传统装配领域逐步拓展到诸如智能人机交互、教育陪护、医疗检测等众多新的服务型应用领域。
3.现有的医用机器人,应用场景往往相对固定,一般是用作于消毒、运送或安保等等应用情景,这些机器人的造价高昂,维护成本较高,结构复杂,但是体积巨大可调整型较差且功能单一。
技术实现要素:
4.本实用新型的目的是提供一种多功能自动导航医用机器人,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
5.一种多功能自动导航医用机器人,包括多功能分块和运动底盘;
6.运动底盘和多功能分块可拆卸连接,运动底盘具有电池模块、微处理器、导航模块、第一无线通讯单元、电机驱动模块和分块识别模块,分块识别模块通过第一无线通讯单元与导航模块通信,导航模块通过第一无线通讯单元与微处理器通信,微处理器与电机驱动模块连接;
7.电池模块用于提供电能,分块识别模块用于识别多功能分块种类,导航模块用于将识别模块的识别结果发送至导航基站并接收运动底盘的定位信号和路线规划信号,微处理器用于获取定位信号和路线规划信号并向电机驱动模块输出对应的驱动信号,电机驱动模块用于驱使运动底盘行进。
8.进一步地,运动底盘的上表面设有下沉的连接槽,多功能分块的下表面设有凸出的连接柱,运动底盘和多功能分块通过连接槽和连接柱可拆卸连接。
9.进一步地,多功能分块为消毒灯、消毒机、喷雾机、运送箱和/或医疗车。
10.进一步地,导航模块包括导航控制单元、第二无线通讯单元、无线定位单元和显示单元,导航控制单元分别与第二无线通讯单元、无线定位单元以及显示单元连接,第一无线通讯单元与第二无线通讯单元通信,无线定位单元用于与基站通信。
11.进一步地,运动底盘还具有陀螺仪,陀螺仪与微处理器连接,陀螺仪用于识别运动底盘当前的行进方向。
12.进一步地,运动底盘还具有避障模块,避障模块与微处理器连接,避障模块用于检测运动底盘与障碍物之间的距离。
13.进一步地,避障模块包括激光避障模块和超声避障模块,激光避障模块设置于运动底盘的前侧,超声避障模块设置于运动底盘的左右旁侧。
14.进一步地,运动底盘还具有悬空防跌模块,悬空防跌模块与微处理器连接,悬空防跌模块用于检测运动底盘的前端与地面方向之间的距离。
15.进一步地,运动底盘还具有充电管理电路,充电管理电路与电池模块连接。
16.进一步地,运动底盘还具有激光搜索模块,激光搜索模块与微处理器连接,激光搜索模块用于在电池模块电量低时搜索附近的预设充电站点。
17.本实用新型的有益效果:可拆卸地配置自动机器人的运动底盘和多功能分块,使运动底盘可以兼容多种多功能分块,从而实现多场景的消毒和运送任务以及降低检修成本。
附图说明
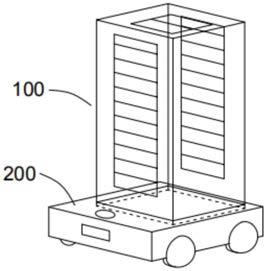
18.图1是第一个实施例提供的多功能自动导航医用机器人的结构示意图。
19.图2是图1实施例的运动底盘的电性原理框图。
20.图3是图1实施例的导航模块的电性原理框图。
21.图4是第二个实施例提供的多功能自动导航医用机器人的结构示意图。
22.图5是第三个实施例提供的多功能自动导航医用机器人的结构示意图。
23.图6是第四个实施例提供的多功能自动导航医用机器人的结构示意图。
具体实施方式
24.为使本实用新型实施例的目的、技术方案和优点更加清晰,下面将结合实施例和附图,对本实用新型作进一步的描述。
25.参阅图1和图3,本实施例提供一种多功能自动导航医用机器人包括多功能分块100和运动底盘200,其中,运动底盘200和多功能分块100可拆卸连接,一运动底盘200可以适配多种不同类型的多功能分块100。
26.具体地,运动底盘200具有电池模块210、微处理器220、导航模块230、第一无线通讯单元240、电机驱动模块250和分块识别模块260,分块识别模块260通过第一无线通讯单元240与导航模块230通信,导航模块230通过第一无线通讯单元240与微处理器220通信,微处理器220与电机驱动模块250连接。
27.其中,电池模块210用于提供电能,分块识别模块260用于识别多功能分块100种类,导航模块230用于将识别模块的识别结果发送至导航基站并接收运动底盘200的定位信号和路线规划信号,微处理器220用于获取定位信号和路线规划信号并向电机驱动模块250输出对应的驱动信号,电机驱动模块250用于驱使运动底盘200行进。
28.本实施例提供的多功能自动导航医用机器人适用于在布置了无线定位基站的场地内使用,例如是医院。实际使用时,电池模块210提供电能为运动底盘200内的各个组成部分进行供电,使用者根据实际需求将对应种类的多功能分块100与运动底盘200进行装配,运动底盘200与多功能分块100 连接后通过分块识别模块260对多功能分块100的种类进行识别并将识别结果发送至导航模块230,导航模块230将识别结果发送至场地内的无线定位基站后,无线定位基站向导航模块230发送运动底盘200当前的定位信号以及与识别结果对应的路线规划信号,微处理器220根据定位信号和路线规划信号并向电机驱动模块250输出对应的驱动信号,电机驱动模块250用于驱使运动底盘200行进。
29.示例性地,如图1所示,本实施例所述的多功能分块100为喷雾机,运动底盘200的上表面设有下沉的连接槽,多功能分块100的下表面设有凸出的连接柱,运动底盘200和多功能分块100通过连接槽和连接柱可拆卸连接。分块识别模块260可以是基于nfc感应对多功能分块100的种类进行识别,多功能分块100的连接柱可以是设置对应消毒灯的nfc标签,对于喷雾机,无线定位基站预设的行进路线可以是覆盖整个医院内部。
30.本实施例所述的导航模块230包括导航控制单元231、第二无线通讯单元232、无线定位单元233和显示单元234,导航控制单元231分别与第二无线通讯单元232、无线定位单元233以及显示单元234连接,第一无线通讯单元240与第二无线通讯单元232通信,无线定位单元用于与基站通信。其中,第二无线通讯单元232用于建立导航控制单元231与外部的通信关系,无线定位单元233用于获取定位信号,导航控制单元231用于处理识别结果、定位信号和路线规划信号,进行相应的接收以及转换传输,导航模块230的实时状态通过显示单元234进行显示。
31.本实施例所述的运动底盘200还具有陀螺仪300,其中,陀螺仪300与微处理器220连接,陀螺仪300用于识别运动底盘200当前的行进方向,运动底盘200行进时,微处理器220将陀螺仪300检测得到的行进方向信息通过导航模块230上传至无线定位基站,从而由无线定位基站判断行进方向是否正确,在必要时修正路线规划。
32.本实施例所述的运动底盘200还具有避障模块400,避障模块400与微处理器220连接,避障模块400用于检测运动底盘200与障碍物之间的距离,根据与障碍物之间的距离进行提前避障,避免运动底盘200在行进过程中被障碍物妨碍。具体地,避障模块400包括激光避障模块和超声避障模块,激光避障模块设置于运动底盘200的前侧,超声避障模块设置于运动底盘200 的左右旁侧。
33.本实施例所述的运动底盘200还具有悬空防跌模块500,悬空防跌模块 500与微处理器220连接,悬空防跌模块500用于检测运动底盘200的前端与地面方向之间的距离。根据与地面方向之间的距离对前方落差距离进行提前预判,避免运动底盘200在行进过程中掉落台阶等位置。
34.本实施例所述的运动底盘200还具有充电管理电路600,充电管理电路 600与电池模块210连接。更进一步地,运动底盘200还具有激光搜索模块700,激光搜索模块700与微处理器220连接,激光搜索模块700用于在电池模块210电量低时搜索附近的预设充电站点。示例性地,医院内还可以设置若干个为运动底盘200充电的预设充电站点,激光搜索模块700通过光学检测对附近的预设充电站点,当运动底盘200的电池模块210点亮过低时,检测到预设充电站点与运动底盘200的距离小于阈值范围时,即判断附近有预设充电站点,导航模块230引导运动底盘200向预设充电站点行进。
35.参阅图4至图6,在一些其他实施例中,多功能分块100还可以是消毒机、消毒灯、运送箱或医疗车。
36.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1