一种圆柱坐标型工业机器人的制作方法
1.本实用新型涉及机器人技术领域,特别是涉及一种圆柱坐标型工业机器人。
背景技术:
2.随着社会的发展和科技的进步,自动化的机器人逐渐替代了工人在工厂的劳动,在机械加工中搬运工件主要是依靠圆柱坐标型工业机器人,其将工件夹持住后,利用自身的旋转,将工件移动到合适的位置。目前的圆柱坐标型工业机器人在使用过程中发现,其在夹持工件后无法对工件进行升降,导致其使用不方便,局限性高。
技术实现要素:
3.本实用新型需要解决的技术问题是提供一种圆柱坐标型工业机器人,方便对工件进行升降,降低使用局限性。
4.为解决上述技术问题,本实用新型所采取的技术方案如下。
5.一种圆柱坐标型工业机器人,包括底板、支板、支撑板、固定板、齿轮、转动轴、两组连接板、升降板、旋转轴、蜗轮、驱动链轮、蜗杆、第一电机、旋转装置和夹持装置,旋转装置安装在底板上端,支板固定安装在旋转装置上,支撑板竖直安装在支板上端,支撑板的左端设置有齿条,固定板竖直安装在支板上端并与支撑板平行,齿轮与支撑板的齿条啮合,齿轮固定安装在转动轴上,转动轴转动安装在两组连接板上,转动轴的前端设置有从动链轮,从动链轮固定安装在转动轴前端,两组连接板均固定安装在升降板的右端,升降板上下滑动安装在固定板上,旋转轴转动安装在升降板上,蜗轮固定安装在旋转轴上,驱动链轮固定安装在旋转轴前端,驱动链轮上设置有链条,驱动链轮与从动链轮通过链条连接,蜗轮与蜗杆啮合,蜗杆转动安装在升降板上,蜗杆的左端与第一电机的输出端连接,第一电机固定安装在升降板上,夹持装置固定安装在升降板下端。
6.优选的,所述旋转装置包括支撑轴、第一锥轮、第二锥轮、驱动轴和第二电机,支板固定安装在支撑轴上,支撑轴转动安装在底板上,第一锥轮固定安装在支撑轴上,第一锥轮与第二锥轮啮合,第二锥轮固定安装在驱动轴左端,驱动轴的右端与第二电机的输出端连接,第二电机固定安装在底板上端。
7.优选的,所述夹持装置包括固定架、两组连接块、固定块、两组第一转轴、两组夹块、第二转轴、滑块、滑动板、丝杆和第三电机,固定架固定安装在升降板下端,两组连接块均固定安装在固定架的下端,固定块固定安装在两组连接块的下端,两组第一转轴分别转动安装在固定块的左右两部,两组夹块的中部分别固定安装在两组第一转轴上,两组夹块的上部分别固定安装在两组第二转轴上,两组第二转轴分别转动安装在两组滑块上,两组滑块分别上下滑动安装在两组滑动板上,两组滑动板均左右滑动安装在固定架上,两组滑动板分别与丝杆的左右两部螺装,丝杆转动安装在两组连接块上,丝杆的右端与第三电机的输出端连接,第三电机固定安装在连接块上。
8.由于采用了以上技术方案,本实用新型所取得技术进步如下。
9.本实用新型通过夹持装置将工件夹紧固定,然后打开第一电机,第一电机带动蜗杆旋转,蜗杆通过蜗轮带动旋转轴和驱动链轮旋转,驱动链轮通过链条带动从动链轮旋转,从动链轮通过转动轴带动齿轮旋转,由于齿轮与支撑板的齿条啮合,所以旋转的齿轮通过两组连接板带动升降板向上移动,升降板带动工件和夹持装置向上移动,至工件上升到合适的位置后,关闭第一电机,然后通过旋转装置旋转支板,使支板带动工件旋转到合适的角度后,打开夹持装置,放置工件即可,通过齿轮的旋转可以调节升降板和夹持装置的高度,方便了对工件的升降,降低了局限性。
附图说明
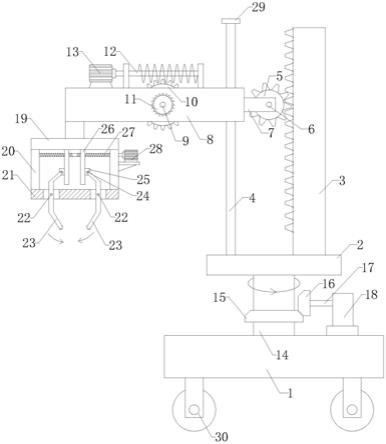
10.图1是本实用新型的主视结构示意图;
11.图2是固定架、连接块和丝杆等的结构示意图;
12.图3是升降板、蜗轮和齿轮等的结构示意图;
13.图4是支撑轴和蜗杆等的结构示意图;
14.其中:1、底板;2、支板;3、支撑板;4、固定板;5、齿轮;6、转动轴;7、连接板;8、升降板;9、旋转轴;10、蜗轮;11、驱动链轮;12、蜗杆;13、第一电机;14、支撑轴;15、第一锥轮;16、第二锥轮;17、驱动轴;18、第二电机;19、固定架;20、连接块;21、固定块;22、第一转轴;23、夹块;24、第二转轴;25、滑块;26、滑动板;27、丝杆;28、第三电机;29、限位块;30、移动装置。
具体实施方式
15.下面将结合附图和具体实施方式对本实用新型进行进一步详细说明。
16.一种圆柱坐标型工业机器人,其结构如图1至图4所示,包括底板1、支板2、支撑板3、固定板4、齿轮5、转动轴6、两组连接板7、升降板8、旋转轴9、蜗轮10、驱动链轮11、蜗杆12、第一电机13、旋转装置和夹持装置。
17.底板1下端固定安装有移动装置30,旋转装置安装在底板1上端,支板2固定安装在旋转装置上,支撑板3竖直安装在支板2上端,支撑板3的左端设置有齿条,固定板4竖直安装在支板2上端并与支撑板3平行,固定板4上端固定安装有限位块29;齿轮5与支撑板3的齿条啮合。
18.齿轮5固定安装在转动轴6上,转动轴6转动安装在两组连接板7上,两组连接板7均固定安装在升降板8的右端,转动轴6的前端设置有从动链轮,从动链轮固定安装在转动轴6前端。
19.升降板8上下滑动安装在固定板4上,旋转轴9转动安装在升降板8上,蜗轮10固定安装在旋转轴9上,驱动链轮11固定安装在旋转轴9前端,驱动链轮11上设置有链条,驱动链轮11与从动链轮通过链条连接。
20.第一电机13固定安装在升降板8上,第一电机13上设置有防尘罩;蜗轮10与蜗杆12啮合,蜗杆12转动安装在升降板8上,蜗杆12的左端与第一电机13的输出端连接。
21.旋转装置包括支撑轴14、第一锥轮15、第二锥轮16、驱动轴17和第二电机18,支撑轴14转动安装在底板1上,支板2固定安装在支撑轴14顶端,第一锥轮15固定安装在支撑轴14中下部,第一锥轮15与第二锥轮16啮合,第二锥轮16固定安装在驱动轴17左端,驱动轴17的右端与第二电机18的输出端连接,第二电机18固定安装在底板1上端。
22.打开第二电机,第二电机通过驱动轴带动第二锥轮旋转,第二锥轮通过第一锥轮带动支撑轴和支板旋转,支板带动支撑板和固定板旋转,支撑板和固定板通过升降板带动工件旋转到合适的角度即可,方便了对工件的旋转。
23.夹持装置包括固定架19、两组连接块20、固定块21、两组第一转轴22、两组夹块23、第二转轴24、滑块25、滑动板26、丝杆27和第三电机28。
24.固定架19固定安装在升降板8下端,两组连接块20均固定安装在固定架19的下端,固定块21固定安装在两组连接块20的下端,两组第一转轴22分别转动安装在固定块21的左右两部。
25.两组夹块23的中部分别固定安装在两组第一转轴22上,两组夹块23的上部分别固定安装在两组第二转轴24上,两组第二转轴24分别转动安装在两组滑块25上,两组滑块25分别上下滑动安装在两组滑动板26上。
26.丝杆27转动安装在两组连接块20上,两组滑动板26分别与丝杆27的左右两部螺装,两组滑动板26能够相对于固定架19左右滑动,丝杆27的右端与第三电机28的输出端连接,第三电机28固定安装在连接块20上。
27.本实用新型工作时,首先打开第三电机28,第三电机28带动丝杆27旋转,旋转的丝杆27带动两组滑动板26相互远离运动,两组滑动板26带动两组滑块25相互远离运动,两组滑块25在相互远离运动的同时会在两组滑动板26上向上滑动,使两组夹块23旋转,两组夹块23在旋转的过程中将工件夹紧固定。
28.然后打开第一电机13,第一电机13带动蜗杆12旋转,蜗杆12通过蜗轮10带动旋转轴9和驱动链轮11旋转,驱动链轮11通过链条带动从动链轮旋转,从动链轮通过转动轴6带动齿轮5旋转,由于齿轮5与支撑板3的齿条啮合,所以旋转的齿轮5通过两组连接板7带动升降板8向上移动,升降板8带动工件和夹持装置向上移动,至工件上升到合适的位置后,关闭第一电机13。
29.打开第二电机18,第二电机18通过驱动轴17带动第二锥轮16旋转,第二锥轮16通过第一锥轮15带动支撑轴14和支板2旋转,支板2带动支撑板3和固定板4旋转,支撑板3和固定板4通过升降板8带动工件旋转到合适的角度,然后在次打开第三电机28,使丝杆27反转,放置工件即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1