七轴机械臂及机器人的制作方法
1.本实用新型涉及机械臂领域,具体地,涉及一种七轴机械臂及机器人。
背景技术:
2.多轴机器人技术近年来发展迅速,机器人应用领域也随之不断扩大,如今被大量地运用在工业应用、娱乐生活上;现有的多轴机器人在工业应用上已经达到安全、精准,大多被应用在代替人在危险场景下重复工作,如:物流搬运、上下料等等;现有的多轴机器人在娱乐生活上做到有陪伴功能、有教育意义,广受消费者好评。但现有的机器人仍然存在运动自由度不够,活动不够灵活的问题。
3.专利文献cn 213226195 u公开了一种三轴机械臂及机器人,包括:底座、第一关节、第二关节以及第三关节,第二关节包括第一端和第二端,第一端和第一关节通过第一关节轴连接,第二端和第三关节通过第二关节轴连接,其中,第一关节通过一轴驱动器驱动,第二关节通过二轴驱动器驱动,第三关节通过三轴驱动器驱动,能够实现三轴机械臂各关节的独立运动,能够根据实际应用情况进行各关节长度的调节,应用范围广、传递效率高,且结构简单,一轴驱动器、二轴驱动器以及三轴驱动器都安装在底座上,有效减小了三轴机械臂的整体尺寸,减轻了第一关节、第二关节以及第三关节上的重量,使得三轴机械臂能够承受较大的负载。但其仍具有自由度不够,活动不够灵活的问题。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型的目的是提供一种七轴机械臂及机器人。
5.根据本实用新型提供的一种七轴机械臂,包括底座、第一旋转电机组件、第一节外壳、第二旋转电机组件、第二节外壳、第三旋转电机组件、第三节外壳、第四旋转电机组件、第四节外壳、第五旋转电机组件、第五节外壳、第六旋转电机组件、第六节外壳、第七旋转电机组件、机械手连接盘以及机械手;
6.所述底座与第一旋转电机组件的一端紧固连接,所述第一旋转电机组件的另一端与所述第一节外壳的一端紧固连接;所述第一旋转电机组件能够带动所述第一节外壳沿所述第一旋转电机组件的轴线方向旋转;
7.所述第一节外壳的另一端紧固连接第二旋转电机组件的一端,所述第二旋转电机组件的另一端紧固连接第二节外壳的一端;所述第二旋转电机组件能够带动所述第二节外壳沿所述第二旋转电机组件的轴线方向旋转;
8.所述第二节外壳的另一端与第三旋转电机组件的一端紧固连接,所述第三旋转电机组件的另一端与所述第三节外壳的一端紧固连接;所述第三旋转电机组件能够带动所述第三节外壳沿所述第三旋转电机组件的轴线方向旋转;
9.所述第三节外壳的另一端与所述第四旋转电机组件的一端紧固连接,所述第四旋转电机组件的另一端与所述第四节外壳的一端紧固连接;所述第四旋转电机组件能够带动所述第四节外壳沿所述第四旋转电机组件的轴线方向旋转;
10.所述第四节外壳的另一端与所述第五旋转电机组件的一端紧固连接,所述第五旋转电机组件的另一端与所述第五节外壳的一端紧固连接;所述第五旋转电机组件能够带动所述第五节外壳沿所述第五旋转电机组件的轴线方向旋转;
11.所述第五节外壳的另一端与所述第六旋转电机组件的一端紧固连接,所述第六旋转电机组件的另一端与所述第六节外壳的一端紧固连接;所述第六旋转电机组件能够带动所述第六节外壳沿所述第六旋转电机组件的轴线方向旋转;
12.所述第六节外壳的一端与所述第七旋转电机组件的一端紧固连接,所述第七旋转电机组件的另一端通过所述机械手连接盘与所述机械手连接;第七旋转电机组件能够带动所述机械手连接盘沿所述第七旋转电机组件的轴线方向旋转;
13.优选的,所述第一旋转电机组件的轴线、第二旋转电机组件的轴线、第三旋转电机组件的轴线、第四旋转电机组件的轴线、第五旋转电机组件的轴线、第六旋转电机组件的轴线以及第七旋转电机组件的轴线依次相互垂直。
14.优选的,所述紧固连接为通过紧固件连接。
15.优选的,所述机械手为六自由度机械手。
16.优选的,所述第一旋转电机组件、第二旋转电机组件、第三旋转电机组件、第四旋转电机组件、第五旋转电机组件、第六旋转电机组件以及第七旋转电机组件均包括旋转电机与电机输出轴外壳,所述旋转电机的输出轴与所述输出轴外壳连接,所述旋转电机的输出轴能够带动所述输出轴外壳沿所述旋转电机的输出轴的轴线旋转;第一旋转电机组件、第二旋转电机组件、第三旋转电机组件、第四旋转电机组件、第五旋转电机组件、第六旋转电机组件中的电机输出轴外壳分别与所述第一节外壳的一端、第二节外壳的一端、第三节外壳的一端、所述第四节外壳的一端、所述第五节外壳的一端、所述第六节外壳的一端以及所述机械手连接盘紧固连接。
17.优选的,第一节外壳、第二节外壳、第三节外壳、第四节外壳、第五节外壳以及第六节外壳均包括旋转电机安装位、中间连接部、以及输出轴外壳安装位;
18.所述旋转电机安装位与输出轴外壳安装位通过中间连接部连接,所述旋转电机安装位的轴线与所述输出轴外壳安装位的轴线相互垂直;所述旋转电机安装位用于安装所述旋转电机,所述输出轴外壳安装位用于与所述输出轴外壳连接。
19.优选的,还包括第一关节连接圆盘、第三关节连接圆盘、第五关节连接圆盘;
20.所述第一旋转电机组件中的输出轴外壳、第三旋转电机组件中的输出轴外壳、第五旋转电机组件中的输出轴外壳上均具有第一螺纹孔组;
21.所述第一关节连接圆盘、第三关节连接圆盘、第五关节连接圆盘上均具有第二螺纹孔组与第三螺纹孔组;
22.所述第一节外壳上的输出轴外壳安装位、第三节外壳上的输出轴外壳安装位以及第五节外壳上的输出轴外壳安装位上均具有第四螺纹孔组;
23.所述第一旋转电机组件中的输出轴外壳上的第一螺纹孔组中的螺纹与所述第一关节连接圆盘上的第二螺纹孔组中的螺纹一一对应,且通过连接件连接,所述第一关节连接圆盘上的第三螺纹孔组中的螺纹与所述第一节外壳的输出轴外壳安装位上的第四螺纹孔组中的螺纹一一对应,且通过连接件连接;
24.所述第三旋转电机组件中的输出轴外壳上的第一螺纹孔组中的螺纹与所述第三
关节连接圆盘上的第二螺纹孔组中的螺纹一一对应,且通过连接件连接;所述第三关节连接圆盘上的第三螺纹孔组中的螺纹与所述第三节外壳上的输出轴外壳安装位上的第四螺纹孔组中的螺纹一一对应,且通过连接件连接。
25.所述第五旋转电机组件中的输出轴外壳上的第一螺纹孔组中的螺纹与所述第五关节连接圆盘上的第二螺纹孔组中的螺纹一一对应,且通过连接件连接;所述第五关节连接圆盘上的第三螺纹孔组中的螺纹与所述第五节外壳上的输出轴外壳安装位上的第四螺纹孔组中的螺纹一一对应,且通过连接件连接。
26.优选的,所述第一节外壳上的旋转电机安装位、第二节外壳上的旋转电机安装位、第三节外壳上的旋转电机安装位、第四节外壳上的旋转电机安装位、所述第五节外壳上的旋转电机安装位以及六节外壳上的旋转电机安装位均包括第一盖体与第一安装位主体;所述第一安装位主体具有第一容纳空间,所述第一盖体上均具有第五螺纹孔组;第二旋转电机组件中的旋转电机、第三旋转电机组件中的旋转电机、第四旋转电机组件中的旋转电机、第五旋转电机组件中的旋转电机、第六旋转电机组件中的旋转电机以及第七旋转电机组件上均具有第六螺纹孔组;
27.所述第一节外壳上旋转电机安装位的第一容纳空间中、第二节外壳上旋转电机安装位的第一容纳空间中、第三节外壳上旋转电机安装位的第一容纳空间中、第四节外壳上旋转电机安装位的第一容纳空间中、所述第五节外壳上旋转电机安装位的第一容纳空间中以及六节外壳上旋转电机安装位的第一容纳空间中分别安装有第二旋转电机组件的旋转电机、第三旋转电机组件的旋转电机、第四旋转电机组件的旋转电机、第五旋转电机组件的旋转电机、第六旋转电机组件的旋转电机以及第七旋转电机组件中的旋转电机;
28.第二旋转电机组件上旋转电机第六螺纹孔组中的螺纹、第三旋转电机组件上旋转电机第六螺纹孔组中的螺纹、第四旋转电机组件上旋转电机第六螺纹孔组中的螺纹、第五旋转电机组件上旋转电机第六螺纹孔组中的螺纹、第六旋转电机组件上旋转电机第六螺纹孔组中的螺纹以及第七旋转电机组件上旋转电机第六螺纹孔组中的螺纹分别与第一节外壳旋转电机安装位第一盖体上第五纹孔组中的螺纹、第二节外壳上的旋转电机安装位第一盖体上第五纹孔组中的螺纹、第三节外壳上的旋转电机安装位第一盖体上第五纹孔组中的螺纹、第四节外壳上的旋转电机安装位第一盖体上第五纹孔组中的螺纹、所述第五节外壳上的旋转电机安装位第一盖体上第五纹孔组中的螺纹以及六节外壳上的旋转电机安装位第一盖体上第五纹孔组中的螺纹一一对应,且通过连接件连接;
29.优选的,所述第二节外壳上的输出轴外壳安装位、第四节外壳上的输出轴外壳安装位、第六节外壳上的输出轴外壳安装位均包括第二安装位主体以及第二盖体;所述第二安装位主体具有第二容纳空间,所述第二盖体上均具有第七螺纹孔组;所述第二旋转电机组件中的输出轴外壳、第四旋转电机组件中的输出轴外壳、第六旋转电机组件中的输出轴外壳上均具有第八螺纹孔组;
30.所述第二节外壳上输出轴外壳安装位的第二容纳空间中、第四节外壳上输出轴外壳安装位的第二容纳空间中、第六节外壳上输出轴外壳安装位的第二容纳空间中分别安装有第二旋转电机组件的输出轴外壳、第四旋转电机组件的输出轴外壳、第六旋转电机组件的输出轴外壳;
31.所述第二节外壳上的输出轴外壳安装位第二盖体上第七螺纹孔组中的螺纹、第四
节外壳上的输出轴外壳安装位第二盖体上第七螺纹孔组中的螺纹、第六节外壳上的输出轴外壳安装位第二盖体上第七螺纹孔组中的螺纹分别与所述第二旋转电机组件输出轴外壳上第八螺纹孔组中的螺纹、第四旋转电机组件中的输出轴外壳上第八螺纹孔组中的螺纹、第六旋转电机组件中的输出轴外壳上第八螺纹孔组中的螺纹一一对应,且通过连接件连接。
32.根据本实用新型提供的一种机器人,采用所述的七轴机械臂。
33.与现有技术相比,本实用新型具有如下的有益效果:
34.1、本实用新型通过第一旋转电机组件、第二旋转电机组件、第三旋转电机组件、第四旋转电机组件、第五旋转电机组件、第六旋转电机组件以及第七旋转电机组件的设计,增加了机械臂的自由度,使机械臂的活动更加灵活。
35.2、本实用新型通过采用六自由度机械手,使机械臂的功能更加丰富,能适应更为复杂的工作条件。
附图说明
36.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
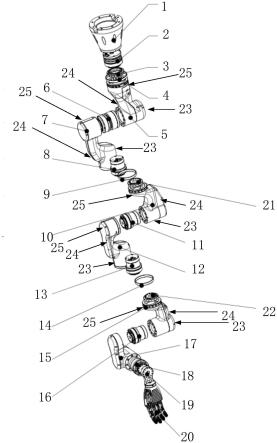
37.图1为本实用新型的结构示意图;
38.图中示出:
[0039][0040]
具体实施方式
[0041]
下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
[0042]
本实用新型提供了一种七轴机械臂,包括底座1、第一旋转电机组件2、第一节外壳5、第二旋转电机组件6、第二节外壳7、第三旋转电机组件8、第三节外壳10、第四旋转电机组件11、第四节外壳12、第五旋转电机组件13、第五节外壳15、第六旋转电机组件16、第六节外壳17、第七旋转电机组件18、机械手连接盘19、机械手20、第一关节连接圆盘3、第三关节连接圆盘21以及第五关节连接圆盘22。所述机械手20为六自由度机械手。优选的所述六自由度机械手可采用cn214818637u 所公开的六自由度机械手结构。
[0043]
如图1所示,所述底座1与第一旋转电机组件2的一端紧固连接,所述第一旋转电机组件2的另一端与所述第一节外壳5的一端紧固连接;所述第一旋转电机组件2能够带动所述第一节外壳5沿所述第一旋转电机组件2的轴线方向旋转;
[0044]
所述第一节外壳5的另一端紧固连接第二旋转电机组件6的一端,所述第二旋转电机组件6的另一端紧固连接第二节外壳7的一端;所述第二旋转电机组件6能够带动所述第二节外壳7沿所述第二旋转电机组件6的轴线方向旋转;
[0045]
所述第二节外壳7的另一端与第三旋转电机组件8的一端紧固连接,所述第三旋转电机组件8的另一端与所述第三节外壳10的一端紧固连接;所述第三旋转电机组件8能够带动所述第三节外壳10沿所述第三旋转电机组件8的轴线方向旋转;
[0046]
所述第三节外壳10的另一端与所述第四旋转电机组件11的一端紧固连接,所述第四旋转电机组件11的另一端与所述第四节外壳12的一端紧固连接;所述第四旋转电机组件11能够带动所述第四节外壳12沿所述第四旋转电机组件11的轴线方向旋转;
[0047]
所述第四节外壳12的另一端与所述第五旋转电机组件13的一端紧固连接,所述第五旋转电机组件13的另一端与所述第五节外壳15的一端紧固连接;所述第五旋转电机组件13能够带动所述第五节外壳15沿所述第五旋转电机组件13的轴线方向旋转;
[0048]
所述第五节外壳15的另一端与所述第六旋转电机组件16的一端紧固连接,所述第六旋转电机组件16的另一端与所述第六节外壳17的一端紧固连接;所述第六旋转电机组件16能够带动所述第六节外壳17沿所述第六旋转电机组件16的轴线方向旋转;
[0049]
所述第六节外壳17的一端与所述第七旋转电机组件18的一端紧固连接,所述第七旋转电机组件18的另一端通过所述机械手连接盘19与所述机械手20连接;第七旋转电机组件18能够带动所述机械手连接盘19沿所述第七旋转电机组件18 的轴线方向旋转;
[0050]
所述第一旋转电机组件2的轴线、第二旋转电机组件6的轴线、第三旋转电机组件8的轴线、第四旋转电机组件11的轴线、第五旋转电机组件13的轴线、第六旋转电机组件16的轴线以及第七旋转电机组件18的轴线依次相互垂直。
[0051]
在一个优选例中,所述紧固连接为通过紧固件连接,优选的所述紧固件为螺钉与螺母。
[0052]
所述第一旋转电机组件2、第二旋转电机组件6、第三旋转电机组件8、第四旋转电机组件11、第五旋转电机组件13、第六旋转电机组件16以及第七旋转电机组件18均包括旋
转电机与电机输出轴外壳,所述旋转电机的输出轴与所述输出轴外壳连接,所述旋转电机的输出轴能够带动所述输出轴外壳沿所述旋转电机的输出轴的轴线旋转;第一旋转电机组件2、第二旋转电机组件6、第三旋转电机组件8、第四旋转电机组件11、第五旋转电机组件13、第六旋转电机组件16中的电机输出轴外壳分别与所述第一节外壳5的一端、第二节外壳7的一端、第三节外壳10的一端、所述第四节外壳12的一端、所述第五节外壳15的一端、所述第六节外壳17 的一端以及所述机械手连接盘19紧固连接。
[0053]
第一节外壳5、第二节外壳7、第三节外壳10、第四节外壳12、第五节外壳15 以及第六节外壳17均包括旋转电机安装位23、中间连接部24、以及输出轴外壳安装位25;
[0054]
所述旋转电机安装位23与输出轴外壳安装位25通过中间连接部24连接,所述旋转电机安装位23的轴线与所述输出轴外壳安装位25的轴线相互垂直;所述旋转电机安装位23用于安装所述旋转电机,所述输出轴外壳安装位25用于与所述输出轴外壳连接。
[0055]
所述第一旋转电机组件2中的输出轴外壳、第三旋转电机组件8中的输出轴外壳、第五旋转电机组件13中的输出轴外壳上均具有第一螺纹孔组;优选的,所述第一螺纹孔组为多个螺纹孔,所述多个螺纹孔沿所述各自输出轴外壳的轴线周向分布。
[0056]
所述第一关节连接圆盘3、第三关节连接圆盘21、第五关节连接圆盘22上均具有第二螺纹孔组与第三螺纹孔组;优选的,所述第二螺纹孔组为多个螺纹孔,所述多个螺纹孔沿所述各自连接圆盘的轴线周向分布;所述第三螺纹孔组为多个螺纹孔,所述多个螺纹孔沿所述各自连接圆盘的轴线周向分布。
[0057]
所述第一节外壳5上的输出轴外壳安装位25、第三节外壳10上的输出轴外壳安装位25以及第五节外壳15上的输出轴外壳安装位25上均具有第四螺纹孔组;
[0058]
所述第一旋转电机组件2中的输出轴外壳上的第一螺纹孔组中的螺纹与所述第一关节连接圆盘3上的第二螺纹孔组中的螺纹一一对应,且通过连接件连接,所述第一关节连接圆盘3上的第三螺纹孔组中的螺纹与所述第一节外壳5的输出轴外壳安装位25上的第四螺纹孔组中的螺纹一一对应,且通过连接件连接;
[0059]
所述第三旋转电机组件8中的输出轴外壳上的第一螺纹孔组中的螺纹与所述第三关节连接圆盘21上的第二螺纹孔组中的螺纹一一对应,且通过连接件连接;所述第三关节连接圆盘21上的第三螺纹孔组中的螺纹与所述第三节外壳10上的输出轴外壳安装位25上的第四螺纹孔组中的螺纹一一对应,且通过连接件连接。
[0060]
所述第五旋转电机组件13中的输出轴外壳上的第一螺纹孔组中的螺纹与所述第五关节连接圆盘22上的第二螺纹孔组中的螺纹一一对应,且通过连接件连接;所述第五关节连接圆盘22上的第三螺纹孔组中的螺纹与所述第五节外壳15上的输出轴外壳安装位25上的第四螺纹孔组中的螺纹一一对应,且通过连接件连接。
[0061]
所述第一节外壳5上的旋转电机安装位23、第二节外壳7上的旋转电机安装位 23、第三节外壳10上的旋转电机安装位23、第四节外壳12上的旋转电机安装位 23、所述第五节外壳15上的旋转电机安装位23以及六节外壳17上的旋转电机安装位23均包括第一盖体与第一安装位主体;所述第一安装位主体具有第一容纳空间,所述第一盖体上均具有第五螺纹孔组,优选的,所述第五螺纹孔组为多个螺纹孔,所述多个螺纹孔沿所述各自旋转电机安装位23的轴线周向分布。
[0062]
第二旋转电机组件6中的旋转电机、第三旋转电机组件8中的旋转电机、第四旋转
电机组件11中的旋转电机、第五旋转电机组件13中的旋转电机、第六旋转电机组件16中的旋转电机以及第七旋转电机组件18上均具有第六螺纹孔组;优选的,所述第六螺纹孔组为多个螺纹孔,所述多个螺纹孔沿所述各自旋转电机的轴线周向分布。
[0063]
所述第一节外壳5上旋转电机安装位23的第一容纳空间中、第二节外壳7上旋转电机安装位23的第一容纳空间中、第三节外壳10上旋转电机安装位23的第一容纳空间中、第四节外壳12上旋转电机安装位23的第一容纳空间中、所述第五节外壳15上旋转电机安装位23的第一容纳空间中以及六节外壳17上旋转电机安装位23的第一容纳空间中分别安装有第二旋转电机组件6的旋转电机、第三旋转电机组件8的旋转电机、第四旋转电机组件11的旋转电机、第五旋转电机组件13 的旋转电机、第六旋转电机组件16的旋转电机以及第七旋转电机组件18中的旋转电机;
[0064]
第二旋转电机组件6上旋转电机第六螺纹孔组中的螺纹、第三旋转电机组件8 上旋转电机第六螺纹孔组中的螺纹、第四旋转电机组件11上旋转电机第六螺纹孔组中的螺纹、第五旋转电机组件13上旋转电机第六螺纹孔组中的螺纹、第六旋转电机组件16上旋转电机第六螺纹孔组中的螺纹以及第七旋转电机组件18上旋转电机第六螺纹孔组中的螺纹分别与第一节外壳5旋转电机安装位23第一盖体上第五纹孔组中的螺纹、第二节外壳7上的旋转电机安装位23第一盖体上第五纹孔组中的螺纹、第三节外壳10上的旋转电机安装位23第一盖体上第五纹孔组中的螺纹、第四节外壳12上的旋转电机安装位23第一盖体上第五纹孔组中的螺纹、所述第五节外壳15上的旋转电机安装位23第一盖体上第五纹孔组中的螺纹以及六节外壳17 上的旋转电机安装位23第一盖体上第五纹孔组中的螺纹一一对应,且通过连接件连接;
[0065]
所述第二节外壳7上的输出轴外壳安装位25、第四节外壳12上的输出轴外壳安装位25、第六节外壳17上的输出轴外壳安装位25均包括第二安装位主体以及第二盖体;所述第二安装位主体具有第二容纳空间,所述第二盖体上均具有第七螺纹孔组;优选的,所述第七螺纹孔组为多个螺纹孔,所述多个螺纹孔沿所述各自输出轴外壳安装位25的轴线周向分布。
[0066]
所述第二旋转电机组件6中的输出轴外壳、第四旋转电机组件11中的输出轴外壳、第六旋转电机组件16中的输出轴外壳上均具有第八螺纹孔组;所述第八螺纹孔组为多个螺纹孔,所述多个螺纹孔沿所述各自输出轴外壳的轴线周向分布。
[0067]
所述第二节外壳7上输出轴外壳安装位25的第二容纳空间中、第四节外壳12 上输出轴外壳安装位25的第二容纳空间中、第六节外壳17上输出轴外壳安装位25 的第二容纳空间中分别安装有第二旋转电机组件6的输出轴外壳、第四旋转电机组件11的输出轴外壳、第六旋转电机组件16的输出轴外壳;
[0068]
所述第二节外壳7上的输出轴外壳安装位25第二盖体上第七螺纹孔组中的螺纹、第四节外壳12上的输出轴外壳安装位25第二盖体上第七螺纹孔组中的螺纹、第六节外壳17上的输出轴外壳安装位25第二盖体上第七螺纹孔组中的螺纹分别与所述第二旋转电机组件6输出轴外壳上第八螺纹孔组中的螺纹、第四旋转电机组件 11中的输出轴外壳上第八螺纹孔组中的螺纹、第六旋转电机组件16中的输出轴外壳上第八螺纹孔组中的螺纹一一对应,且通过连接件连接。
[0069]
所述七轴机械臂还包括第一节软环4、第三节软环9以及第五节软环14。第一节软
环4、第三节软环9以及第五节软环14分别套装在所述第一旋转电机组件2中的输出轴外壳上、第三节外壳10上的输出轴外壳安装位25以及第五节外壳15上的输出轴外壳安装位25上。第一节软环4、第三节软环9以及第五节软环14用于装配好后,遮挡住第四螺纹孔组,起到美观装饰的作用。
[0070]
本实用新型的工作原理为:
[0071]
所述第一旋转电机组件2带动所述第一节外壳5沿所述第一旋转电机组件2的轴线方向旋转;所述第二旋转电机组件6能够带动所述第二节外壳7沿所述第二旋转电机组件6的轴线方向旋转;所述第三旋转电机组件8能够带动所述第三节外壳 10沿所述第三旋转电机组件8的轴线方向旋转;所述第四旋转电机组件11能够带动所述第四节外壳12沿所述第四旋转电机组件11的轴线方向旋转;所述第五旋转电机组件13能够带动所述第五节外壳15沿所述第五旋转电机组件13的轴线方向旋转;所述第六旋转电机组件16能够带动所述第六节外壳17沿所述第六旋转电机组件16的轴线方向旋转;第七旋转电机组件18能够带动所述机械手连接盘19沿所述第七旋转电机组件18的轴线方向旋转。所述第一旋转电机组件2、第二旋转电机组件6、第三旋转电机组件8、第四旋转电机组件11、第五旋转电机组件13、第六旋转电机组件16以及第七旋转电机组件作为七个轴为所述七轴机械臂提供多个自由度,并且采用六自由度机械手通过机械手连接盘19与所述第七旋转电机组件18连接,更大程度增加了七轴机械臂的自由度,使机械臂更加灵活,功能更加丰富,能适应更为复杂的工作条件。
[0072]
本实用新型还提供了一种机器人,采用所述的七轴机械臂。
[0073]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0074]
以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1