一种用于穿戴式下肢外骨骼机器人的光伏供电系统
1.本发明专利属于医疗辅助设备领域,特别是涉及一种用于穿戴式下肢外骨骼机器人的光伏供电系统。
背景技术:
2.外骨骼机器人,是基于仿生学和人体工程学设计的一种“套在人体外面”的可穿戴式机械装置。它将人类的智力和机器人的“体力”结合,靠人来控制机器人,通过机器人来完成仅靠人的自身能力无法单独完成的任务。
3.近几年来,因车祸和疾病导致下肢残疾或瘫痪的患者越来越多。对于脊髓损伤和脑卒中(中风)患者来说,下肢外骨骼机器人能够辅助他们进行康复训练或者站立行走。然而,现有的外骨骼机器人所用的电池一般安装在外骨骼腰部,既笨重又消耗了电能,由于电量有限,仅能在室内使用,无法满足户外较长距离行走的需求,影响了患者的使用体验,从而也影响了外骨骼机器人的推广与使用。
4.在专利《长续航且轻量化的智能外骨骼机器人》(专利申请号201810149859.7)采用环形气囊结构,使得外骨骼机器人更加轻便,将电池组由外骨骼机器人内置变为外置,单独由轮椅拖载,更加高效利用电能。此方案虽然减少了电池自身负重的电能消耗,能够延长续航里程,但是仍存在以下几个方面的不足:(1)铅蓄电池容量有限,在长续航过程中仍然存在电能不足或用尽的可能。(2)由于增加了轮椅,整个系统由外骨骼和轮椅两部分构成,整体显得庞大,因室内空间较小使用不便,外骨骼本身无内置电源,离开轮椅无法使用。(3)由于增加了轮椅,在户外使用时需要陪护人员推行轮椅,增加了陪护人员的负担。
技术实现要素:
5.本发明提出了一种用于穿戴式下肢外骨骼机器人的光伏供电系统,本发明通过利用太阳能,采用最大功率点跟踪及四阶段充电控制策略,给下肢外骨骼和电动轮椅供电。
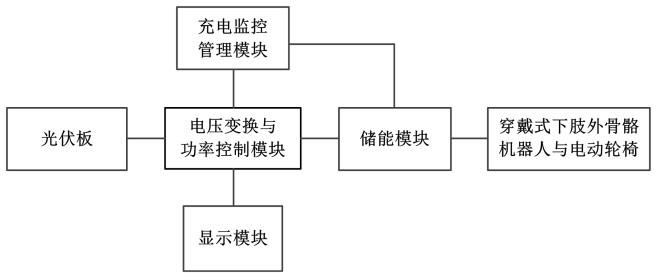
6.为实现上述目的,本技术提供了如下方案:一种用于穿戴式下肢外骨骼机器人的光伏供电系统,包括:光伏板、电压变换与功率控制模块、充电监控管理模块、显示模块、储能模块、穿戴式下肢外骨骼、电动轮椅;所述光伏板与所述电压变换与功率控制模块连接;所述电压变换与功率控制模块分别与所述充电监控管理模块、所述显示模块、所述储能模块连接;所述储能模块与所述穿戴式下肢外骨骼和所述电动轮椅连接;所述光伏板用于通过太阳能发电,输出直流电压;所述电压变换与功率控制模块用于对所述光伏板的输出电压进行直流降压斩波和实时功率分析运算,得到以最大功率点跟踪的电流;所述充电监控管理模块用于监控蓄电池的当前剩余电量及电压判断充电状态,以最大功率进行涓流、恒流、恒压、浮充四阶段充电及状态管理;
所述显示模块用于显示充电状态、充电电流、电压及电量;所述储能模块由两个蓄电池成,用于以最大功率点跟踪的电流对其进行充电;接收所述最大功率点跟踪的电流进行充电,并将充电状态通过所述电压变换与功率控制模块转发到所述充电监控管理模块;所述穿戴式下肢外骨骼用于接收储能模块的供电进行工作;所述电动轮椅用于装载光伏板、蓄电池、电压变换与功率控制模块、充电监控管理模块和显示模块,并运载下肢外骨骼及穿戴者进行移动。
7.优选的,所述电压变换与功率控制模块包括单片机和电压变换器;所述单片机与所述电压变换器连接;所述单片机用于对所述光伏板输出的直流电压进行监测和降压斩波,输出pwm脉冲到所述电压变换器;所述电压变换器用于根据所述pwm脉冲控制igbt开关器件的通断状态对所述光伏板输出的直流电压进行降压斩波,并将变换后的电压经所述充电监控管理模块输入到所述储能模块;所述单片机还用于对所述电压变换器进行充电电压和充电电流检测,基于近似梯度变步长电压扰动观察法的最大功率点跟踪的控制策略编程,经过所述单片机程序运行和分析计算,向所述充电监控管理模块输出允许信号,以最大功率点跟踪的电流对所述储能模块电池充电;所述电压变换器还用于将变换后的电压输入到所述单片机,为单片机、所述充电监控管理模块和所述显示模块提供工作电源。
8.优选的,所述电压变换器采用dc-dc降压斩波电压变换器,包括:igbt开关管、稳压电容和直流斩波电路;所述igbt开关管与所述稳压电容连接;所述稳压电容与所述直流斩波电路连接;所述稳压电容用于使得所述光伏板输出的电压降压后保持稳定;所述直流斩波电路用于对稳压后的所述光伏板输出的电压进行转换,并将所述转换后的电压输入到所述单片机和所述储能模块;所述开关管用于根据所述单片机输出的pwm脉冲进行占空比调节,输出所述以最大功率点跟踪的电流。
9.优选的,所述单片机采用stm8s105c6单片机。
10.优选的,所述充电监控管理模块具有涓流、恒流、恒压和浮充的充电管理模式,具体过程为:在恒压充电和浮充电模式,充电电压由外部电阻分压网络设置;在恒压充电阶段,充电电流逐渐减小,当充电电流降低到外部电阻所设置的值时,充电监控管理模块进入浮充电状态;在浮充电状态,如果所述储能模块电压下降到所设置的恒压充电电压的预设阈值时,自动开始新的充电周期;在恒流充电模式,充电电流通过一个外部电阻设置;在涓流充电模式,当所述储能模块的电压低于所设置的恒压充电电压的预设阈值时,充电监控管理模块用所设置的恒流充电电流的预设阈值对所述储能模块进行涓流充电。
11.优选的,所述充电监控管理模块采用cn3717智能充电管理芯片。
12.优选的,所述储能模块由两个12v、200ah的蓄电池成。
13.优选的,所述光伏供电系统同时给穿戴式下肢外骨骼机器人和电动轮椅供电。
14.本发明的有益效果为:本发明提供了一种用于穿戴式下肢外骨骼机器人的光伏供电系统,利用安装于电动轮椅顶部的太阳能板给放置于电动轮椅底部的大容量蓄电池充电,再由电池组给下肢外骨骼机器人和电动轮椅供电,这种方案解决了下肢外骨骼户外行走电力不足的难题,充分利用太阳能,低碳环保,节省下肢外骨骼因承载电池组自身重量而消耗的电能,提升了电池利用率,延长了下肢外骨骼的续航里程,并且本发明采用基于近似梯度变步长电压扰动观察法的最大功率点跟踪的控制策略,大幅提升太阳能的转换率。
附图说明
15.为了更清楚地说明本技术的技术方案,下面对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
16.图1为本技术实施例一一种用于穿戴式下肢外骨骼机器人的光伏供电系统模块结构示意图;图2为本技术实施例一一种用于穿戴式下肢外骨骼机器人的光伏供电系统具体结构示意图;图3为本技术实施例一的充电管理电路原理示意图;图4为本技术实施例一的近似梯度扰动观察法最大功率点跟踪控制流程示意图;图5为本技术实施例一一种用于穿戴式下肢外骨骼机器人的光伏供电系统实物连接结构示意图。
具体实施方式
17.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
18.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本技术作进一步详细的说明。
19.实施例一如图1-2所示,一种用于穿戴式下肢外骨骼机器人的光伏供电系统,包括:光伏板、电压变换与功率控制模块、充电监控管理模块、显示模块、储能模块、穿戴式下肢外骨骼机器人、电动轮椅;光伏板与电压变换与功率控制模块连接;电压变换与功率控制模块分别与充电监控管理模块、显示模块、储能模块连接;储能模块与穿戴式下肢外骨骼机器人和电动轮椅连接;光伏板用于通过太阳能发电,输出直流电压;
具体的,光伏板的型号为sfm-540,几何尺寸为2279mm*1134mm*35mm,输出最大功率为540w,输出最高电压为49.55v,短路电流13.89a,最大工作电压41.62v,最大工作电流12.98a,额定光照强度1000w/m2,环境温度25℃。
20.电压变换与功率控制模块对光伏板输出的电压进行直流降压斩波和实时功率分析计算,得到最大功率输出电流;电压变换与功率控制模块包括单片机和电压变换器;单片机与电压变换器连接;电压变换器用于对光伏板输出的电压进行变换,并将变换后的电压输入到单片机和储能模块;单片机用于对光伏板输出的电压和变换后的电压进行分析运算,输出pwm脉冲到电压变换器;电压变换器还用于根据pwm脉冲进行负载调节,输出以最大功率点跟踪的电流;具体的,电压变换器采用dc-dc电压变换器,包括:igbt开关管、稳压电容和buck直流斩波电路;igbt开关管与稳压电容连接;稳压电容与buck直流斩波电路连接;igbt开关管用于接受单片机pwm脉冲信号,对光伏板输出的电压进行降压斩波,并将转换后的电压输入到单片机,为单片机供电;稳压电容用于使斩波后的电压保持稳定;buck直流斩波电路用于接受充电监控管理芯片cn3717发出的pwm脉冲信号,控制mosfet开关状态对光伏板输出的电压进行降压,并以最大功率点跟踪的电流对蓄电池充电。
21.储能模块用于接收最大功率点跟踪的电流进行充电,并将充电状态通过电压变换与功率控制模块转发到充电监控管理模块;具体的,储能模块采用两个光伏储能胶体免维护蓄电池,型号为ag12-200,额定电压12v,容量200ah,充电使能电压10.8v,恒压充电压14.7v,浮充电压13.8v,涓流充电电流0.26a,恒流充电电流6.5a,过充终止电流1a。
22.充电监控管理模块用于根据充电状态控制电压变换与功率控制模块对储能模块进行充电;具体的,充电监控管理模块选用国产的cn3717芯片,cn3717是一款利用pwm与dc-dc降压斩波模式的铅蓄电池充电管理集成电路,具有封装外形小,外围元器件少和使用简单等优点,它的外围电路原理如图3所示。cn3717具有涓流、恒流、恒压和浮充四种充电模式,非常适合铅蓄电池的四阶段充电。在恒压充电和浮充电模式,充电电压由外部电阻分压网络设置;在恒流充电模式,充电电流通过一个外部电阻设置。对于深度放电的电池,当电池电压低于所设置的恒压充电电压的81.8%时,cn3717用所设置的恒流充电电流的13%对电池进行涓流充电。在恒压充电阶段,充电电流逐渐减小,当充电电流降低到外部电阻所设置的值时,cn3717进入浮充状态。在浮充状态,如果电池电压下降到所设置的恒压充电电压的81.8%时,自动开始新的充电周期。
23.具体的,单片机选用意法半导体公司的stm8s105c6单片机,它是一个48引脚的8位基础型的单片机,具有3级流水线的哈佛结构,16mhz cpu时钟频率,多达32k字节flash和集成真正的数据eeprom,9路定时器输入捕获/输出比较通道,10位adc,4个定时器,带有同步时钟输出的uart、spi、i
²
c等资源。其中,16位高级控制定时器(timer1)是一个高端定时器,带有互补输出、死区控制和中心对齐的pwm功能。通过26管脚将最大功率点跟踪控制策略输出的信号给充电监控管理芯片cn3717。蓄电池的充电电流、电压信号分别经20和21管脚输入到单片机。贴装在蓄电池上的热敏电阻用于检测温度,通过22管脚输入到单片机。
24.具体的,基于近似梯度变步长电压扰动观察法的最大功率点跟踪的控制策略,如
图4所示。最大功率跟踪可以看作求解光伏电池p-u曲线上功率的最大值,即最大功率点。根据光伏电池p-u特性,忽略温度的影响,光伏电池最大功率点的电压与开路电压存在近似线性关系:(1)设光伏电池输出电压为,是以为单变量的功率函数,它为连续可一阶微分的非线性函数。在p-u特性曲线上寻找功率对电压的导数为零的点,即满足的点为最大功率点。
25.(2)(3)若当前工作点的输出电压为,输出电流为,输出功率为,光伏发电系统经电压扰动后,无论是正方向扰动,还是负方向扰动,下一个采样周期的工作电压为,输出电流为。将功率函数在连续域的导数用离散域的一阶差分法近似表示,得到:(4)将输出电压细分为三个区间,处在不同区间的工作点的扰动电压采用不同的扰动步长。为了在p-u曲线上更快地搜索到最大功率点,引入常数,,使得扰动步长变化更明显。当,说明当前工作点在最大功率点的左侧。由于p-u曲线的左半支较长且较为平滑,当时,为了快速跟踪最大功率点,应该沿着电压正方向以较大步长增加电压,增加步长为;当时,为了对最大功率点跟踪更准确,应该沿着电压正方向以较小步长增加电压,增加步长为;当,说明当前工作点在最大功率点的右侧,由于p-u曲线右半支较短且较陡,当时,为了快速跟踪最大功率点,应该沿着电压负方向以较大步长减小电压,减小的步长为;当时,为了对最大功率点跟踪更准确,应该沿着电压负方向以较小步长减小电压,减小的步长为。因此,近似梯度变步长的电压迭代公式可以表示为:(5)显示模块用于显示充电状态、充电电流、电压及电量;具体的,mgls240128t图形液晶显示模块是一种性能价格比较高、能显示字符、图
形和曲线的液晶显示模块,它是点阵数为240(列)*128(行),它由控制器t6963c、列驱动器t6a39、行驱动器t6a40以及与外部设备的接口等几部分组成,接口时序为intel 8080,该模块与单片机的接口十分方便。单片机管脚37-44直接与lcd的数据端口db0-db7相连接,当充电过程中因电池升温太快、电池过度放电、充电电压过高等报警信息时,管脚9发出充电保护信号切断充电使能中断充电过程。
26.优选的,如图5所示,光伏供电系统给穿戴式下肢外骨骼和电动轮椅供电。
27.所述穿戴式下肢外骨骼用于接收所述储能模块的供电进行工作。
28.具体的,穿戴式下肢外骨骼主要以铝合金为骨骼材料,由安装在髋部和膝部的四个瑞士maxon公司成套减速伺服电机(包括绝对式编码器、直流伺服驱动电机和行星减速齿轮)驱动,给穿戴者的下肢运动提供外力。穿戴式下肢外骨骼还设置了用于固定腰部、大腿和小腿的支撑套。
29.所述电动轮椅用于装载太阳能光伏板、光伏储能胶体免维护蓄电池组、电压变换与功率跟踪控制模块、充电监控管理模块和显示模块,并可以运载下肢外骨骼及穿戴者进行移动。
30.进一步的,本发明供电系统性能测试结果,如下表1所示:表1本发明的目的在于提供适用于医疗辅助设备领域的下肢外骨骼机器人的供电系统,主要由穿戴式下肢外骨骼机器人与电动轮椅两部分构成。与专利《长续航且轻量化的智能外骨骼机器人》(专利申请号201810149859.7)相比,本发明有如下优点:(1)电动轮椅运载光伏板和蓄电池组,这样大大减轻了下肢外骨骼机器人的负重,在一定程度上降低了电能损耗,同时使穿戴者行走时更加灵活轻便,提升了穿戴者的舒适度。(2)与阀控式铅酸蓄电池相比,光伏储能胶体免维护蓄电池更适合光伏发电系统的储能,性能更优。(3)安装在电动轮椅上的蓄电池组能够选择更大体积、更大容量,能进一步提升设备的持续使用时间和续航能力;同时减少了蓄电池的充电频次,延长了电池使用寿命,缩短了设备因充电闲置的时间,提升了设备使用效率。(4)在本装置使用过程中,当光照不足时,装置由蓄电池组供电;当光照充足时,光伏板不仅直接给下肢外骨骼机器人和电动轮椅供电,还同时给蓄电池组充电,充分利用太阳能,降低使用成本,为下肢外骨骼机器人在医疗领域的普及提供了有利条件。(5)当蓄电池组电量不足时,除了通过光伏板充电,也可通过外接交流电源充电,充电方式灵活多样,可选择性强。(6)当患者穿戴下肢外骨骼助力行走感到疲倦时,可以选择在电动轮椅上休息或者乘坐电动轮椅继续进行户外活动,让下肢外骨骼机器人变得更加舒
适、实用与人性化。
31.以上所述的实施例仅是对本技术优选方式进行的描述,并非对本技术的范围进行限定,在不脱离本技术设计精神的前提下,本领域普通技术人员对本技术的技术方案做出的各种变形和改进,均应落入本技术权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1