多形态移动机器人
1.本发明涉及机器人技术领域,尤其涉及一种多形态移动机器人。
背景技术:
2.单一运动形态的机器人的环境适应性差,完成的工作形式单一,对多种工况的处理能力不足,需通过增加机器人种类来完成多种工作任务,因此,具有多种形态运动的移动机器人在人类生活、工程应用等领域具有重要的意义。
技术实现要素:
3.针对上述现有技术中的不足,本发明提供一种多形态移动机器人,能使平台进行多种形态的变化,并配合折展支链形成多种移动方式;具备运动形式多样,折叠收纳易储存的功能。
4.为了实现上述目的,本发明提供一种多形态移动机器人,包括一可变平台和四条折展支链;所述可变平台包括四个顶角;所述折展支链的顶端与所述顶角一一对应地活动连接;所述可变平台和所述折展支链分别包括若干活动节点,每一所述活动节点配置有至少一转动驱动件。
5.优选地,所述可变平台包括多个平台工作状态,所述平台工作状态包括平面固定状态、平面摆动状态、空间摆动状态、空间固定状态和折叠状态;
6.当所述可变平台处于所述平面固定状态时,所述可变平台呈方形;
7.当所述可变平台处于所述平面摆动状态时,所述可变平台呈8字形;
8.当所述可变平台处于所述空间摆动状态时,所述可变平台可分为两个相同大小的矩形平面并沿连接于两所述矩形平面之间的两所述活动节点旋转;
9.当所述可变平台处于所述空间固定状态时,所述可变平台呈c字形;
10.当所述可变平台处于所述折叠状态时,所述可变平台呈四边形,所述四边形的面积小于所述平面固定状态时的所述方形。
11.优选地,所述可变平台包括四个直角躯干和四个所述活动节点,四个所述活动节点包括两折叠关节组件和两层叠关节组件;所述直角躯干设置于所述可变平台的四个顶角;相邻的两所述直角躯干通过所述折叠关节组件或所述层叠关节组件相连且两所述两折叠关节组件对置设置,两所述层叠关节组件对置设置;
12.每一所述折叠关节组件包括一第一折叠关节和一第二折叠关节,所述第一折叠关节的第一端通过一所述转动驱动件连接相邻的所述直角躯干的端部,所述第一折叠关节的第二端通过一所述转动驱动件连接所述第二折叠关节的第一端,所述第二折叠关节的第二端与相邻所述直角躯干的端部转动连接;
13.每一所述层叠关节组件包括一第一层叠关节和一第二层叠关节,所述第一层叠关节的第一端通过一所述转动驱动件连接相邻的所述直角躯干的端部,所述第一层叠关节的第二端通过一所述转动驱动件连接所述第二层叠关节的第一端,所述第二层叠关节的第二
端与相邻所述直角躯干的端部转动连接。
14.优选地,每一所述折展支链包括一连接关节、一中腿和一支撑腿;所述连接关节的第一端通过一所述转动驱动件与所述可变平台连接,所述连接关节的第二端与所述中腿的第一端通过一所述转动驱动件连接;所述中腿的第二端与所述支撑腿的第一端通过一所述转动驱动件连接;所述支撑腿的第二端安装有一连接装置。
15.优选地,所述支撑腿可通过所述转动驱动件驱动旋转与所述中腿层叠合并布置。
16.优选地,所述转动驱动件包括舵机。
17.优选地,包括多种工作形态,所述工作形态包括:平台四足形态、摆动行走形态、滚动形态、窄距四足形态和折叠形态;
18.当处于所述平台四足形态时,通过所述舵机控制所述折叠关节组件和所述层叠关节组件使得所述可变平台变形为呈方形,四条所述折展支链可向各方向行走;
19.当处于所述摆动行走形态时,通过所述舵机控制所述折叠关节组件和层叠关节组件使得所述折叠关节组件上下分层且所述可变平台呈8字形,四条所述折展支链配合实现摆动前行;
20.当处于所述滚动形态时,通过所述舵机控制所述折叠关节组件和所述层叠关节组件使得所述可变平台变形为呈方形,所述折展支链的所述舵机相互配合,所述可变平台一侧的两所述折展支链的支撑腿分别通过所述连接装置可转动地连接所述可变平台另一侧的两所述折展支链的支撑腿,机器人可滚动前行;
21.当处于所述窄距四足形态时,通过所述舵机控制所述折叠关节组件和层叠关节组件使得所述变平台呈c字形,可实现窄距通行;
22.当处于所述折叠形态时,通过所述舵机控制所述折叠关节组件和所述层叠关节组件使得所述可变平台通过两所述折叠关节组件对折后,再通过两所述层叠关节组件对折,所述变平台呈四边形,所述折展支链分别收拢在所述可变平台的两侧。
23.本发明由于采用了以上技术方案,使其具有以下有益效果:
24.(1)本发明机器人采用可变平台以及折展支链的设计,可进行自重构变形,避免了机器人在不同形态的重新装配。
25.(2)本发明机器人通过可变平台的自重构可以实现平台四足形态、摆动行走形态、窄距四足形态和折叠形态等多种运动形态,避免了单一运动形态的局限性。
26.(3)本发明机器人进入折叠模式后占用体积小,便于收纳储藏,结构规则对称,利于堆叠等实际工程意义。
附图说明
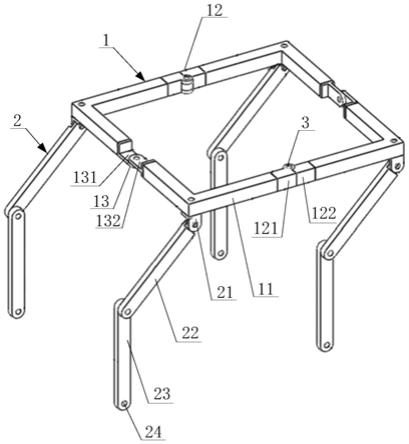
27.图1为本发明实施例的多形态移动机器人的结构示意图;
28.图2为本发明实施例的多形态移动机器人的从平台四足形态转化为摆动行走形态的过程图;
29.图3为本发明实施例的多形态移动机器人的从平台四足形态转化为滚动形态的过程图;
30.图4为本发明实施例的多形态移动机器人的从平台四足形态转化为窄距四足形态的过程图;
31.图5为本发明实施例的多形态移动机器人的从平台四足形态转化为折叠形态的过程图。
具体实施方式
32.下面根据附图图1~图5,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点。
33.请参阅图1~图5,本发明实施例的一种多形态移动机器人,包括一可变平台1和四条折展支链2;可变平台1包括四个顶角;折展支链2的顶端与顶角一一对应地活动连接;可变平台1和折展支链2分别包括若干活动节点,每一活动节点配置有至少一转动驱动件。
34.本实施例中,可变平台1包括多个平台工作状态,平台工作状态包括平面固定状态、平面摆动状态、空间摆动状态、空间固定状态和折叠状态;
35.当可变平台1处于平面固定状态时,可变平台1呈方形;
36.当可变平台1处于平面摆动状态时,可变平台1呈8字形;
37.当可变平台1处于空间摆动状态时,可变平台1可分为两个相同大小的矩形平面并沿连接于两矩形平面之间的两活动节点旋转;
38.当可变平台1处于空间固定状态时,可变平台1呈c字形;
39.当可变平台1处于折叠状态时,可变平台1呈四边形,四边形的面积小于平面固定状态时的方形。
40.可变平台1包括四个直角躯干11和四个活动节点,四个活动节点包括两折叠关节组件12和两层叠关节组件13;直角躯干11设置于可变平台1的四个顶角;相邻的两直角躯干11通过折叠关节组件12或层叠关节组件13相连且两两折叠关节组件12对置设置,两层叠关节组件13对置设置;
41.每一折叠关节组件12包括一第一折叠关节121和一第二折叠关节122,第一折叠关节121的第一端通过一转动驱动件连接相邻的直角躯干11的端部,第一折叠关节121的第二端通过一转动驱动件连接第二折叠关节122的第一端,第二折叠关节122的第二端与相邻直角躯干11的端部转动连接;
42.每一层叠关节组件13包括一第一层叠关节131和一第二层叠关节132,第一层叠关节131的第一端通过一转动驱动件连接相邻的直角躯干11的端部,第一层叠关节131的第二端通过一转动驱动件连接第二层叠关节132的第一端,第二层叠关节132的第二端与相邻直角躯干11的端部转动连接。
43.每一折展支链2包括一连接关节21、一中腿22和一支撑腿23;连接关节21的第一端通过一转动驱动件与可变平台1连接,连接关节21的第二端与中腿22的第一端通过一转动驱动件连接;中腿22的第二端与支撑腿23的第一端通过一转动驱动件连接;支撑腿23的第二端安装有一连接装置24。
44.支撑腿23可通过转动驱动件驱动旋转与中腿22层叠合并布置。
45.转动驱动件包括舵机3。
46.本发明实施例的一种多形态移动机器人,包括多种工作形态,工作形态包括:平台四足形态、摆动行走形态、滚动形态、窄距四足形态和折叠形态;
47.当处于平台四足形态时,通过舵机3控制折叠关节组件12和层叠关节组件13使得
可变平台1变形为呈方形,锁定可变平台1的8个舵机3,此时可变平台1为方形刚体,其余舵机3相互配合,四条折展支链2可向各方向行走;
48.当处于摆动行走形态时,通过舵机3控制折叠关节组件12和层叠关节组件13使得折叠关节组件12上下分层且可变平台1呈8字形,四条折展支链2配合实现摆动前行;
49.当处于滚动形态时,通过舵机3控制折叠关节组件12和层叠关节组件13使得可变平台1变形为呈方形,折展支链2的舵机3相互配合,可变平台1一侧的两折展支链2的支撑腿23分别通过连接装置24可转动地连接可变平台1另一侧的两折展支链2的支撑腿23,机器人可滚动前行;
50.当处于窄距四足形态时,通过舵机3控制折叠关节组件12和层叠关节组件13使得变平台呈c字形,可实现窄距通行;
51.当处于折叠形态时,通过舵机3控制折叠关节组件12和层叠关节组件13使得可变平台1通过两折叠关节组件12对折后,再通过两层叠关节组件13对折,变平台呈四边形,折展支链2分别收拢在可变平台1的两侧,可将机器人压缩成体积很小的形态。
52.以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1