一种汽车电动尾门防碰撞控制方法与流程
1.本发明涉及汽车技术领域,更具体地说,它涉及一种汽车电动尾门防碰撞控制方法。
背景技术:
2.随着汽车行业的发展,汽车逐步向电动化、智能化方向发展。电动尾门作为一种新型尾门开启方式,因其便利性,已经开始逐步取代手动开启方式,在各车企的车型中的应用越来越广泛。
3.目前电动尾门一般含有高度设定功能,尾门的开启高度可以手动按尾门按钮进行设定或者通过中控屏设定。但是遇到特殊情形,如天花板较低时,则在尾门开启时,需要人工识别,开启到一定程度后,暂停尾门。此时也可按需设定此时尾门开启高度(高度记忆功能)。如车辆停的位置靠墙壁较近,而尾门在开启的时候会向后侵入,尾门开启后会和墙壁发生后碰,此时也需要人工识别。
4.中国专利公告号cn110469227a,公告日2019年11月19日,发明的名称为一种汽车车门开门的方法、汽车控制系统及汽车,该申请案公开了一种汽车车门开门的方法、汽车控制系统及汽车,(简单介绍该申请案)。设置于汽车车门周围的测距装置和汽车内的控制器;所述控制器,用于控制所述测距装置以预设检测角度开启检测,获得检测结果,所述预设检测角度是基于所述开启汽车车门的预设区域来确定的;基于所述检测结果,判断在所述检测角度对应的检测范围内是否有一个以上的障碍物;在确定有所述一个以上的障碍物时,判断所述一个以上的障碍物是否都位于所述预设区域内;在确定都位于所述预设区域内时,生成控制指令,以控制所述汽车车门开启,进而对开启汽车车门的预设区域进行精确定位。上述方法虽然能够通过检测一定区域内的障碍物实现判断是否能够将汽车车门开启,但是上述方法检测方法通过检测不准确,使得车门开启的角度不好判断;同时上述结构采用的是投影灯进行投影,使得结构复杂,同时检测的结果不准确。
技术实现要素:
5.本发明克服了现有技术中通过检测判断车尾门后部是否有障碍从而实现判断车尾门开启是否能够开启、且开启的角度大小的方法复杂的不足,提供了一种汽车电动尾门防碰撞控制方法,它能通过检测车尾门后部障碍物的角度,简单快速准确的判断开启车尾门角度的大小。
6.为了解决上述技术问题,本发明采用以下技术方案:一种汽车电动尾门防碰撞控制方法,所述汽车电动尾门防碰撞控制方法通过控制系统实现,所述控制系统包括ecu、安装在汽车电动尾门的测距装置和用于支撑汽车尾门开启的支撑装置,所述汽车电动尾门防碰撞控制方法包括以下步骤:s1:测距装置检测尾门距离后端的障碍物之间的距离为l1,ecu计算汽车尾门能够打开的角度为θ1;
s2:测距装置检测尾门距离上端的障碍物之间的距离为l2,ecu计算汽车尾门能够张开的角度为θ2;s3:设定安全距离为lt,ecu比较l1与lt之间的大小:当l1大于lt时,ecu控制支撑装置将汽车尾门开启的角度为θ2;当l1小于lt时,ecu比较θ1与θ2的大小,当θ1大于θ2时,ecu控制支撑装置将汽车尾门开启的角度为θ2;当θ1小于θ2时,ecu控制支撑装置将尾门开启的角度为θ1。
7.本发明通过在汽车尾门开启之前分别检测距离尾门后端和距离尾门上端障碍物之间的距离,通过比较汽车尾门距离后端障碍物之间的距离与安全距离之间大小,并通过ecu分别计算出汽车尾门能够开启的角度,之后进行比较向上开启和向后开启之间的角度并通过ecu控制尾门进行开启,实现控制尾门角度的精确开启,保证汽车尾门在开启的过程中不会触碰到其他的物体;上述防碰撞控制方法简单,效果好。
8.作为优选,还包括以下步骤:s4:当ecu控制汽车尾门开启时,汽车尾门每转动θ3角度时,进行检测一次汽车尾门距离后端障碍物之间的距离为l11,ecu比较l1与l11的大小,当l11小于l1时,重新计算汽车尾门能够打开的角度为θ4,ecu控制支撑装置将汽车尾门开启角度为θ4。
9.通过设置每当汽车尾门转动θ3角度时重新检测一次汽车尾门距离后端障碍物之间的距离为l11,并通过比较l11与l1的大小,防止因为检测误差或者后端障碍物大小形状不规则而造成汽车尾门与障碍物之间的误碰。
10.作为优选,当θ1角度小于θ4的角度时,ecu发出型号给整车bcm,bcm通过机车语音系统发出提示信息。
11.提示信息提示提示驾驶员后端尾门开启角度过小,提醒驾驶员观察周边的情况。
12.作为优选,当ecu控制尾门开启的角度为θ1时,ecu控制尾门开启的角度为θ1—θ5;当ecu控制尾门开启的角度为θ2时,ecu控制尾门开启的角度为θ2—θ5;当ecu控制尾门开启的角度为θ1时,ecu控制尾门开启的角度为θ4—θ5。
13.汽车尾门通过支撑杆而打开,由于支撑杆开启汽车尾门时会具有一定的惯性,使得ecu控制支撑杆将汽车尾门打开一定的角度停止之后,汽车尾门由于一定的惯性还是会继续打开一定的角度,因此通过设置θ5,来弥补上述因惯性而产生的车尾门开启的误差。
14.作为优选,所述支撑装置为支撑杆,所述支撑杆的一端与汽车尾门连接,另一端与汽车连接,其特征是,所述支撑杆包括导向套和活塞杆,所述活塞杆的一端可滑动的设置在导向套内,所述活塞杆的另一端与所述尾门相连接,所述活塞杆与所述尾门连接处的端部设置有回缩机构。
15.当测距装置发生故障时,由于不能够检测出汽车尾门距离后端障碍物之间的距离,使得汽车尾门会与后端的障碍物发生碰撞,为了减小由于支撑杆支撑汽车尾门与障碍物碰撞而造成汽车尾门破损的危害,或者减小由于没有及时发现而造成对汽车尾门的二次碰撞,设置回缩机构。
16.作为优选,所述回缩机构包括:固定段,所述固定段固定设置在所述活塞杆的端部,所述固定段上设置有第一倾斜段,所述第一倾斜段的圆周方向上设置有第一环槽;滑动圈,固定设置在所述尾门上,所述滑动圈的圆周方向设置有滑孔,所述滑孔内
设置有滑动销和弹簧,所述弹簧的两端分别与所述滑动销和所述滑孔的底端相抵接;其中,所述滑动销通过弹簧的作用与所述第一环槽相抵接。
17.当汽车尾门由于检测装置发生故障时而与障碍物发生碰撞后,由于滑动销是通过弹簧抵接在第一环槽内,碰撞的力会使得滑动销从第一环槽内脱离出,由于第一环槽设置在第一倾斜段上,通过滑动销与第一倾斜段倾斜面的作用以及汽车尾门自身的重力作用,使得滑动圈能够沿第一倾斜段进行相对滑动,进而使得汽车尾门能够自动回缩一端距离,使得汽车尾门及时的与障碍物之间形成一段保护距离,防止汽车尾门造成二次碰撞。
18.作为优选,所述固定段上设置有第二倾斜段,所述第二倾斜段的圆周方向上设置有第二环槽。
19.由于汽车尾门受到与障碍物的第一次撞击之后滑动圈会与固定段发生相对滑动,且由于设置在第一倾斜段上,当滑动圈沿第一倾斜段滑动时,当滑动销滑动到与第二环槽卡接时,滑动圈停止运动,如若当汽车尾门受到第二次碰撞时,由于沿第一倾斜段滑动时使得弹簧的弹力已经减小,这就使得第二次碰撞的力很小时就能使得汽车尾门产生进行自动回缩,使得汽车尾门与障碍物之间第二次形成一段保护距离。
20.作为优选,所述活塞杆在靠近所述固定段的一端设置有限位段。
21.限位段用于限制所述滑动圈与固定段相对滑动的距离过大,实现控制滑动圈沿固定段相对滑动距离的作用。
22.与现有技术相比,本发明的有益效果是:(1)能够自动的判断尾门后端障碍物的情况,实现准确的自动开启汽车尾门,判断方法简单;(2)能够减小汽车尾门与后端障碍物发生碰撞的而造成的损害,且有效的防止汽车尾门与后端障碍物的二次碰撞。
附图说明
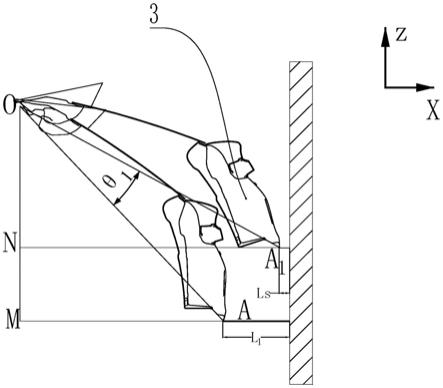
23.图1是本发明的θ1角度计算的辅助示意图;图2是本发明的θ2角度计算的辅助示意图;图3是本发明的汽车尾门开启的方法流程示意图;图4是本发明的另一实施例的辅助示意图;图5是本发明的支撑杆的结构图;图6是图5中的局部放大示意图;图7是图6中的局部放大示意图;图中:1、支撑杆,11、导向套,12、活塞杆;2、回缩机构,21、固定段,211、第一倾斜段,212、第一环槽,213、第二倾斜段,214、第二环槽,22、滑动圈,221、滑孔,222、滑动销,223、弹簧,23、限位段;3、汽车尾门。
具体实施方式
24.下面通过具体实施例,并结合附图,对本发明的技术方案作进一步的具体描述:实施例1:参照图1至图3所示,一种汽车电动尾门防碰撞控制方法,所述汽车电动尾门防碰撞控制方法通过控制系统实现,所述控制系统包括ecu、bcm、安装在汽车电动尾门的测距装置和用于支撑汽车尾门开启的支撑装置,所述测距装置根据汽车尾门实际的形状安装,本实
施例中在汽车尾门的a点、b点、c点设置测距装置,测距装置在本实施例中采用的是雷达测距装置,ecu接受并分析计算测距装置发来的信号,通过分析控制支撑装置将汽车尾门开启,所述汽车电动尾门防碰撞控制方法包括以下步骤:s1:a点的测距装置检测尾门距离后端的障碍物之间的距离为l1,ecu计算汽车尾门能够打开的角度为θ1;θ1的角度通过以下计算公式计算得出:如图1所示,o(xo,zo)点为汽车尾门轴心转动的坐标点;a(xa,za)点为汽车尾门下部端点;a1(xa1,za1)点为汽车尾门开启之后下部的端点;ls为汽车尾门开启后距离障碍物之间的安全间距,本实施例中设置为50mm;am、a1n水平,om垂直;am=xa-xooa1=oaoa1*sin(∠moa+θ1)-am=l
1-lss2:本实施例中,当汽车尾门打开的过程中由于障碍物的高度不同,当汽车尾门打开时b点或c点首先会碰到障碍物,因此在b点或c点设置测距装置以检测尾门距离上端的障碍物之间的距离为l2,ecu计算汽车尾门能够张开的角度为θ2,当ecu计算处多个θ2时,取多个θ2的最小值作为输出值;以b点为例,θ2的角度通过以下计算公式计算得出:如图2所示,o(xo,zo)点为汽车尾门轴心转动的坐标点;b(xb,zb)点为汽车尾门上部的端点;b1(xb1,zb1)垫为汽车尾门上部开启之后的端点;ls为汽车尾门开启后距离障碍物之间的安全间距,本实施例中设置为50mm;bp、b1q水平,op、oq垂直;
26.bp=xb-xoob=ob
11
s3:设定安全距离为lt,本实施例中将安全距离lt大小设置成与oa大小相等,ecu比较l1与lt之间的大小:
当l1大于lt时,ecu控制支撑装置将汽车尾门开启的角度为θ2;当l1小于lt时,ecu比较θ1与θ2的大小,当θ1大于θ2时,ecu控制支撑装置将汽车尾门开启的角度为θ2;当θ1小于θ2时,ecu控制支撑装置将尾门开启的角度为θ1。
25.本发明通过在汽车尾门开启之前分别检测距离尾门后端和距离尾门上端障碍物之间的距离,通过比较汽车尾门距离后端障碍物之间的距离与安全距离之间大小,并通过ecu分别计算出汽车尾门能够开启的角度,之后进行比较向上开启和向后开启之间的角度并通过ecu控制尾门进行开启,实现控制尾门角度的精确开启,保证汽车尾门在开启的过程中不会触碰到其他的物体;上述防碰撞控制方法简单,效果好。
26.当θ1角度小于θ4的角度时,θ4的大小可以设定,本实施例中将θ4的大小设定成30
°
,ecu发出型号给整车bcm,bcm通过机车语音系统发出提示信息。
27.提示信息提示提示驾驶员后端尾门开启角度过小,提醒驾驶员观察周边的情况。
28.在ecu控制车门使得车门慢慢的打开时,当ecu控制尾门开启的角度为θ1时,ecu控制尾门开启的角度为θ1—θ5;当ecu控制尾门开启的角度为θ2时,ecu控制尾门开启的角度为θ2—θ5;当ecu控制尾门开启的角度为θ1时,ecu控制尾门开启的角度为θ4—θ5。
29.汽车尾门通过支撑杆而打开,由于支撑杆开启汽车尾门时会具有一定的惯性,使得ecu控制支撑杆将汽车尾门打开一定的角度停止之后,汽车尾门由于一定的惯性还是会继续打开一定的角度,因此通过设置θ5,本实施例中将θ5设定成2
°
,来弥补上述因惯性而产生的误差。
30.实施例2,参照图4所示,本实施例中与实施例1方法相似,不同之处在于包括以下步骤:s4:当ecu控制汽车尾门开启时,汽车尾门每转动θ3角度时,设定值越小越好,可以提高检测的精度,本实施例中将θ3设定为5
°
,进行检测一次汽车尾门距离后端障碍物之间的距离为l11,ecu比较l1与l11的大小,当l11小于l1时,重新计算汽车尾门能够打开的角度为θ4,计算方法与上述计算θ1的方法相同,ecu控制支撑装置将汽车尾门开启角度为θ4。
31.在图4中,在汽车尾门后端的障碍物上可能由于障碍物的的形状不规则,仅仅通过检测一次汽车尾门距离障碍物之间的距离并不准确,因此通过设置每当汽车尾门转动θ3角度时重新检测一次汽车尾门距离后端障碍物之间的距离为l11,并通过比较l11与l1的大小,防止因为检测误差或者后端障碍物大小形状不规则而造成汽车尾门与障碍物之间的误碰。
32.实施例3,参照图5至图7所示,本实施例与实施例1方法基本相似,不同之处在与,支撑装置为支撑杆1,支撑杆1属于现有技术,且可以受ecu的控制进行伸缩,支撑杆1的一端与汽车尾门3连接,另一端与汽车本体进行连接,其特征是,支撑杆1包括导向套11和活塞杆12,活塞杆12的一端可滑动的设置在导向套11内,活塞杆12的另一端与汽车尾门3相连接,活塞杆12与汽车尾门3连接处的端部设置有回缩机构2。
33.回缩机构2包括:固定段21,固定段21固定设置在活塞杆12的端部,固定段21上设置有第一倾斜段211,第一倾斜段211的圆周方向上设置有第一环槽212;滑动圈22,固定设置在汽车尾门3上,滑动圈22的圆周方向设置有滑孔221,滑孔221内设置有滑动销222和弹簧223,弹簧223的两端分别与滑动销222和滑孔221的底端相抵接,弹簧223对滑动销222的支撑力可以使得汽车尾门在开启的时候能够防止滑动圈22和固
定段21之间发生相对滑动;滑动销222与弹簧223之间设置一个压力传感器;其中,滑动销222通过弹簧223的作用与第一环槽212相抵接。
34.当汽车尾门3由于检测装置发生故障时而与障碍物发生碰撞后,由于滑动销222是通过弹簧抵接在第一环槽212内,碰撞的力会使得滑动销222从第一环槽212内脱离出,由于第一环槽212设置在第一倾斜段211上,通过滑动销222与第一倾斜段211的倾斜面的作用以及汽车尾门3自身的重力作用,使得滑动圈22能够沿第一倾斜段211进行相对滑动,进而使得汽车尾门3能够自动回缩一端距离,使得汽车尾门3及时的与障碍物之间形成一段保护距离,防止汽车尾门3造成二次碰;由于滑动销22沿着第一倾斜段211进行滑动,压力传感器受到的力会逐渐减小,当压力减小时,压力传感器将型号发送给ecu,通过ecu控制支撑杆1停止将汽车尾门3支撑开。当汽车尾门3关闭之后会自动的使得滑动圈22和固定段21之间的相对位置进行复位。
35.固定段21上设置有第二倾斜段213,第二倾斜段213的圆周方向上设置有第二环槽214。活塞杆12在靠近固定段21的一端设置有限位段23,限位段23为活塞杆12向外圆周方向突出的圆台。
36.由于汽车尾门3受到与障碍物的第一次撞击之后滑动圈22会与固定段21发生相对滑动,且由于设置在第一倾斜段211上,当滑动圈22沿第一倾斜段211滑动时,当滑动销222滑动到与第二环槽卡214接时,滑动圈22停止运动,如若当汽车尾门3受到第二次碰撞时,由于沿第一倾斜段211滑动时使得弹簧223的弹力已经减小,这就使得第二次碰撞的力很小时就能使得滑动圈22和第二倾斜段213发生相对滑动,进而使得汽车尾门3产生进行自动回缩,使得汽车尾门3与障碍物之间第二次形成一段保护距离。
37.本发明通过在汽车尾门上安装一定数量的检测装置,通过检测装置将汽车尾门距离后端障碍物和上上端障碍物之间的距离进行检测,当汽车尾门距离后端的距离大于汽车安全距离lt时,此时汽车尾门开启时不会触碰到后端的障碍物,进而只需要防止汽车尾门开启时是否会触碰到上端的障碍物,因此只要保证开启时的角度为θ2时就可防止与上端障碍物之间发生碰撞;当汽车尾门距离后端的距离小于汽车安全距离lt时,此时需要判断θ2与θ1的大小,并将较小值作为汽车尾门开启的值,为了防止有些因为汽车尾门的构造不同而使得开启一定的角度之后会碰撞到上端的障碍物,可以在可能与上端障碍物碰撞处设置距离检测装置,例如实施例1中将c和b点作为距离检测装置的安装位置。为了进一步的防止可能因为检测装置的损坏或者失灵而使得在活塞杆12上设置回缩机构,回缩机构能够使得汽车尾门与后端的障碍物碰撞之后能够自动的进行回缩,使得汽车尾门与障碍之间形成一段保护距离,防止汽车尾门受到二次的伤害。
38.以上所述的实施例只是本发明较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1