一种工业机器人在方向盘生产中快速拖动示教系统的制作方法
1.本发明属于汽车零部件喷漆技术领域,更具体地说,特别涉及一种工业机器人在方向盘生产中快速拖动示教系统。
背景技术:
2.汽车方向盘在生产的过程中需先对模具喷漆,鉴于方向盘具有较多的曲面,且对喷漆的膜厚要求较高,而现有的多为采用工业机器人的方式,但其编程较繁琐,且由于方向盘的体积较小,并且方向盘的曲率变化大,编程困难,因此会造成其在喷漆加工时存在着诸多不便。
3.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种工业机器人在方向盘生产中快速拖动示教系统,以期达到更加实用的目的。
技术实现要素:
4.为了解决上述技术问题,本发明提供一种工业机器人在方向盘生产中快速拖动示教系统,以解决现有的多为采用工业机器人的方式,但其编程较繁琐,且由于方向盘的体积较小,并且方向盘的曲率变化大,编程困难的问题。
5.本发明一种工业机器人在方向盘生产中快速拖动示教系统的目的与功效,由以下具体技术手段所达成:
6.一种工业机器人在方向盘生产中快速拖动示教系统,包括底座,底座的主体为矩形结构,且底座的内部开设有安装孔,并且底座中所开设的安装孔用于穿过螺栓限位底座,在底座的顶端固定连接有机器人座体,在机器人座体的顶端还安装有工业机器人,工业机器人为多轴结构,且工业机器人通过机器人座体供电驱动。
7.进一步的,所述安装板的右侧中心位置安装有喷枪,喷枪为管状结构,且喷枪位于工业机器人和拖动手柄的内侧位置,在喷枪中远离安装板的一侧还安装有调节盘。
8.进一步的,所述调节盘的一侧安装有喷头a和喷头b,喷头a和喷头b呈环形阵列安装在调节盘的右侧位置,且喷头a和喷头b均与喷枪相匹配。
9.进一步的,所述机器人座体的一侧安装有控制模块,控制模块用于处理位置与速度等关键信息后判断当前点位速度是否为正常值,其中包括删除缺损丢失数据,过低速度点位与过高速度点位。
10.进一步的,所述工业机器人的一侧还安装有安装板,安装板中远离工业机器人的一侧还安装有拖动手柄,拖动手柄用于控制喷枪的朝向。
11.进一步的,所述调节盘与喷枪为转动连接,且调节盘的一侧还通过侧板安装有力矩传感器,力矩传感器为六轴传感器结构,且力矩传感器用于检测六轴力与力矩。
12.与现有技术相比,本发明具有如下有益效果:
13.1、本装置在拖动示教的过程中,工控机设置有启动和暂停两种信号,当工人点击暂停信号后,工控机即停止记录数据,人工在此时可更换需要的喷头a或喷头b进行使用,选
择完成后可继续拖动示教,工控机即可记录当前的喷头a或喷头b的输入输出信号并进行处理,使得其在进行示教工作时无需编制过于复杂的程序即可进行示教工作,有效的减少了人工的劳动强度,提高了示教的效率。
14.2、本装置中的技术不需要使用喷涂机器人或协作机器人,在运行的过程中始终始于位置模式下,实现低成本的拖动示教,同时又可使用工业机器人的高速度高刚性再现拖动程序,针对方向盘生产过程中的曲线曲面等特征可轻松实现拖动示教功能,通过对拖动速度的记录即可轻松实现拖动的效果即再现的效果,大幅减少编程人员对程序编制的工作量。
15.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
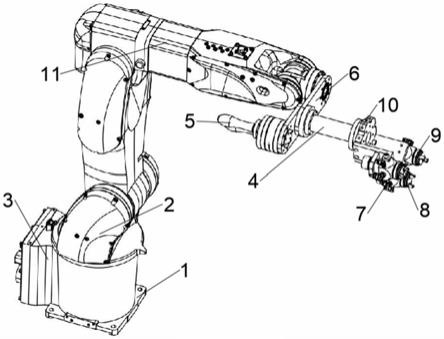
16.图1是本发明的前侧视结构示意图。
17.图2是本发明的左视结构示意图。
18.图3是本发明的俯视结构示意图。
19.图4是本发明的图3中a处放大结构示意图。
20.图中,部件名称与附图编号的对应关系为:
21.1、底座;2、机器人座体;3、控制模块;4、喷枪;5、拖动手柄;6、安装板;7、力矩传感器;8、喷头a;9、喷头b;10、调节盘;11、工业机器人。
具体实施方式
22.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
23.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
24.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
25.实施例:
26.如附图1至附图4所示:
27.本发明提供一种工业机器人在方向盘生产中快速拖动示教系统,包括底座1,底座1的主体为矩形结构,且底座1的内部开设有安装孔,并且底座1中所开设的安装孔用于穿过螺栓限位底座1,在底座1的顶端固定连接有机器人座体2,在机器人座体2的顶端还安装有工业机器人11,工业机器人11为多轴结构,且工业机器人11通过机器人座体2供电驱动,调
节盘10的一侧安装有喷头a8和喷头b9,喷头a8和喷头b9呈环形阵列安装在调节盘10的右侧位置,且喷头a8和喷头b9均与喷枪4相匹配。
28.参考图1-图2,机器人座体2的一侧安装有控制模块3,控制模块3用于处理位置与速度等关键信息后判断当前点位速度是否为正常值,其中包括删除缺损丢失数据,过低速度点位与过高速度点位,工业机器人11的一侧还安装有安装板6,安装板6中远离工业机器人11的一侧还安装有拖动手柄5,拖动手柄5用于控制喷枪4的朝向。
29.参考图1-图4,安装板6的右侧中心位置安装有喷枪4,喷枪4为管状结构,且喷枪4位于工业机器人11和拖动手柄5的内侧位置,在喷枪4中远离安装板6的一侧还安装有调节盘10,调节盘10与喷枪4为转动连接,且调节盘10的一侧还通过侧板安装有力矩传感器7,力矩传感器7为六轴传感器结构,且力矩传感器7用于检测六轴力与力矩。
30.本实施例的具体使用方式与作用:
31.在使用本装置的时候,首先通过将力矩传感器7安装至工业机器人11的右侧所安装的调节盘10之上,然后通过力矩传感器7计算出此时装置的静态力与力矩值;
32.然后,通过启动工业机器人11及机器人座体2一侧所安装的控制模块3实时捕捉力矩传感器7所测定到的数值,并减去静态力矩值在当前姿态下的变换矩阵,得到实际外部力与力矩值;
33.此时,再通过工人手部握持拖动手柄5对装置施加外部力,工业机器人11将捕获的力和力矩转换成末端tcp的移动,其中移动时需要添加工业机器人11中tcp坐标系的各个轴的阻尼系数与滤波时间;
34.然后,通过建立工控机与工业机器人11的通讯,具体包括以下步骤:
35.1.首先,将工业机器人11的位置和速度等矩阵信息赋值成实数变量,定义一个总字符串,将以上的位置与速度信息列队放置至该字符串中;
36.2.通过工控机识别出报文中的位置与速度等关键信息,并同步的识别出位置与速度等关键信息后判断当前点位速度是否为正常值,其中包括删除缺损丢失数据,过低速度点位与过高速度点位,同时在此步骤获取记录工业机器人11的输入输出信号,判断完成后将报文以固定格式转换成ascii文件。
37.3.然后,将处理后的程序通过总线协议发送至指定的工业机器人11的文件目录中,此时再通过启动工业机器人11进行反编译,实现再现轨迹的功能。
38.4.在拖动示教的过程中,工控机设置有启动和暂停两种信号,当工人点击暂停信号后,工控机即停止记录数据,人工在此时可更换需要的喷头a8或喷头b9进行使用,选择完成后可继续拖动示教,工控机即可记录当前的喷头a8或喷头b9的输入输出信号并进行处理。
39.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1