吉他机器人的制作方法
1.本发明涉及机器人技术领域,具体为一种吉他机器人。
背景技术:
2.在日常生活中,为了保证身体的功能系统和良好的状态对于大脑来说,需要一种工作后放松的好方法。除了深呼吸、冥想和洗热水澡。听舒缓的音乐也是一种非常有效的放松方式,可以帮助缓解压力、焦虑、抑郁和睡眠问题。在乐器方面,除了精通相应的音乐理论知识之外,弹奏吉他也要求很好的手的协调能力和一定的力量控制能力。虽然这些技能可以通过花一定的时间和练习得到一定的提高。然而,对于那些想要弹吉他却没有技巧的人实现起来是很困难的。在特殊场合中,需要一些现场的乐器声音来达到逼真的效果而不是通过媒体播放,然而精通吉他技巧的表演者通常有着高昂的出场费用,所以吉他机器人因此而生。
3.现有的技术中虽然有着许多大型的演奏机器人,但存在以下缺点:
4.1、现有的大型的演奏机器人,体型大、材料和组装方式都更贵更麻烦、成本高、不便于随身携带,制作周期长、能耗高;
5.2、现有演奏机器人,音域比较窄、所能弹奏谱曲比较少,不能弹奏颤音、鼓音等,也不能弹奏难度更大、更需要技巧的曲谱,更不能弹奏指弹技巧的谱曲,且演奏效果不好;
6.3、现有演奏机器人的牢固性和使用时的稳定性比较差,在承受功能部件的重力和拨动琴弦产生的反作用力时,容易变形错位,产生错误音质。
7.4、现有演奏机器人容易对吉他造成损伤。
技术实现要素:
8.(一)解决的技术问题
9.针对现有技术的不足,本发明提供了一种吉他机器人,易拆卸组装、成本低、体型小、便于携带、能弹奏颤音、鼓音、拨弦音等、还能够弹奏出范围更广、难度更大、更需要技巧的曲谱,演奏效果更加出色和真实,同时采用仿生蜘蛛腿的形状,大大提高了安装的牢固性和使用时的稳定性。
10.(二)技术方案
11.为实现以上目的,本发明通过以下技术方案予以实现:一种吉他机器人,包括左手机器人、右手机器人,所述左手机器人、右手机器人都通过t型卡固块与吉他固定,所述左手机器人包括双连杆压弦系统、左手蜘蛛型卡座,所述左手机器人通过左手蜘蛛型卡座固定于吉他左侧,所述左手蜘蛛型卡座的一侧设有与吉他琴弦对应的多个滑槽,所述左手蜘蛛型卡座的另一侧上方固定双连杆压弦系统,所述双连杆压弦系统包括多组双连杆压弦机构,所述双连杆压弦机构包括琴弦按压伺服电机、主动连杆、从动连杆、琴弦压块,所述琴弦按压伺服电机的驱动轴与主动连杆的一端连接,所述主动连杆的另一端与从动连杆的一端铰接,所述从动连杆的另一端伸入其对应的滑槽下方后与琴弦压块固定,所述右手机器人
包括右手蜘蛛型卡座、多组拨弦机构、多组颤音敲击装置、多组吉他面板敲击装置,所述右手机器人通过右手蜘蛛型卡座固定于吉他右侧,所述拨弦机构、颤音敲击装置、吉他面板敲击装置固定于右手蜘蛛型卡座上,所述拨弦机构包括拨弦电机、拨片夹杆、吉他拨片;所述拨弦电机的驱动轴与拨片夹杆的一端连接,所述拨片夹杆的另一端与吉他拨片通过槽口过盈配合,所述吉他面板敲击装置包括吉他面板敲击电机、吉他面板敲击片,所述吉他面板敲击电机驱动轴与吉他面板敲击片的一端连接,所述吉他面板敲击片的另一端伸入右手蜘蛛型卡座所开设的敲击槽口下方,所述颤音敲击装置包括颤音敲击电机、颤音敲击片,所述颤音敲击电机的驱动端与颤音敲击片的一端连接,所述颤音敲击片的一端伸入右手蜘蛛型卡座所开设的颤音槽口下方;所述左手蜘蛛型卡座与右手蜘蛛型卡座都设有多个卡块,所述卡块与t型卡固块搭配固定;所述t型卡固块呈t型,所述t型卡固块的一侧上设有多个螺纹孔,2个所述t型卡固块分别置于卡块两侧,且通过螺栓穿过t型卡固块上的螺纹孔、卡块上的安装孔进行固定。
12.进一步优选的,所述主动连杆与从动连杆上还都设有凹槽。
13.进一步优选的,所述吉他面板敲击片呈l型。
14.进一步优选的,所述颤音敲击装置设有6组,包括第一颤音敲击装置、第二颤音敲击装置、第三颤音敲击装置、第四颤音敲击装置、第五颤音敲击装置、第六颤音敲击装置,所述第一颤音敲击装置与第六颤音敲击装置对称设置,所述第二颤音敲击装置与第五颤音敲击装置对称设置,所述第三颤音敲击装置与第四颤音敲击装置对称设置。
15.进一步优选的,所述第一颤音敲击装置通过第一平面板与第二颤音敲击装置固定,所述第二颤音敲击装置与第一平面板之间设有1个第二平面板,所述第二颤音敲击装置通过另一第一平面板与第三颤音敲击装置固定,所述第三颤音敲击装置与另一第一平面板之间设有2个第二平面板。
16.进一步优选的,所述右手蜘蛛型卡座包括底板、四个卡块、2个支撑腿、4个定位腿,所述底板的四角处设有定位腿,四个卡块分别设置于所述底板的两侧,2个支撑腿设置于所述底板的前端。
17.进一步优选的,所述左手机器人、右手机器人还与控制器或电脑电性连接。
18.进一步优选的,所述琴弦压块的宽度大于滑槽。
19.(三)有益效果
20.本发明提供了吉他机器人,具备以下有益效果:
21.1、本发明的吉他机器人包括颤音敲击装置、吉他面板敲击装置等装置,可以控制吉他发出颤音、鼓音、拨弦音等,使吉他机器人控制发出的音域更广,相比于现有的大多数吉他机器人,本发明的吉他机器人可以实现部分指弹技巧,还能够弹奏出范围更广、难度更大、更需要技巧的曲谱,演奏效果更加出色和真实。
22.2、本发明通过左手机器人和右手机器人分别控制吉他的左部分和右部分,通过左手机器人按压吉他的弦颈的不同部位来调节音色,通过右手机器人用来拨动或击打琴弦来产生声音和通过伺服电机的速度来控制声音的大小,两者协同动作,通过机械系统演奏吉他,且本发明比大型机器人乐队体积更小、更便宜,制造时间周期更短。
23.3、本发明使用卡块和t型卡固块配套使用将吉他卡住,使左手蜘蛛型卡座与右手蜘蛛型卡座与吉他之间位置牢牢固定,这样就保证了损坏的部分可以随时更换,节省了后
期维护的费用;还能时正常演奏时其位置也不会改变。并且通过螺栓穿过t型卡固块上的螺纹孔、卡块上的安装孔进行固定,通过这种固定方式来固定吉他机器人相对于吉他的位置,这种设计也达到了易于组装和拆卸的要求,同时,由于螺栓是由密度较大的材料制成的,吉他机器人可以在演奏过程中增加机器的重量,从而减少琴弦受压时受到反作用力撞击并被弹离地面的不良影响。
24.4、本发明的吉他机器人除了实现基本的吉他演奏的目标功能外,还有以下几点。首先,该吉他机器人可以通过与伺服电机相连的控制开关随时中断当前的演奏内容并播放其他的音乐。也就是说,这个吉他机器人最多可以存储多个乐谱,以便在需要时进行切换。此外,该吉他机器人的传输效率较高,例如右手机器人,拨弦电机可以通过拨片夹杆上的吉他拨片直接拨动琴弦,而不是通过连杆系统间接连接,从而减小大量能源损耗。此外,吉他机器人的外观可以令人印象深刻。它的整体外观与蜘蛛相似,非常美观。
25.5、本发明的左手蜘蛛型卡座与右手蜘蛛型卡座都是采用仿生蜘蛛腿的形状,这样可以大大提高安装的牢固性和使用时的稳定性,还能在承受功能部件的重力和拨动琴弦产生的反作用力时,能够保证良好的强度和刚度,减少变形,保证最佳的音质;并且由于外形使用了仿生技术,参考了蜘蛛的外形,让整体机器更加稳定而且受力均衡。
26.6、本发明的4个定位腿则确保了右手蜘蛛型卡座与吉他的相对位置,以保证演奏弦的部分和打击弦的部分与琴弦保持一个正确的相对位置,不会影响吉他的使用功能,同时还能避免意外发生,即使底板损坏,整机也不会塌向吉他。
27.7、本发明主动连杆与从动连杆上还都设有凹槽,这样设计一方面为了美观,另一方面可以这是用于减少材料重量,减小对吉他的伤害。
28.8、本发明的材质可以选择亚克力材料,通过亚克力材料减少了整体机器的重量,降低了成本;且各个零部件是通过拼装零件连接方式设计的,大大降低了组装难度和生产的经济和时间成本,后期维护和更换零件的成本更低。
29.9、本发明的吉他机器人小型化的设计,让该吉他机器人拥有和吉他差不多的体积大小,不仅易于携带、储藏。而且能耗低;整个结构组装工艺简单,相比于传统的胶水粘合或者多螺丝固定的方法更加方便;且所有零件都是平面化设计,易于拆解后的携带和储藏。
30.本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
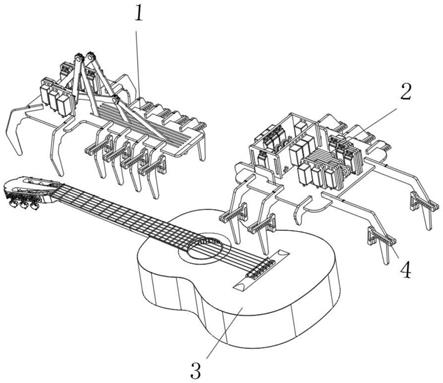
31.图1是本发明的结构示意图;
32.图2是本发明的左手机器人结构示意图;
33.图3是本发明的左手蜘蛛型卡座的结构示意图;
34.图4是本发明的双连杆压弦系统的结构示意图;
35.图5是本发明的双连杆压弦系统的背面示意图;
36.图6是本发明的右手机器人的示意图;
37.图7是本发明的右手机器人的俯视图;
38.图8是本发明的右手蜘蛛型卡座的示意图;
39.图9是本发明的t型卡固块的结构示意图;
40.图10是本发明的拨弦机构的示意图;
41.图11是本发明的拨弦机构的俯视图;
42.图12是本发明的拨片夹杆的示意图;
43.图13是本发明的颤音敲击装置的部分示意图;
44.图14是本发明的多组颤音敲击装置的布置示意图;
45.图中:1、左手机器人;2、右手机器人;3、吉他;4、t型卡固块;11、双连杆压弦系统;111、琴弦按压伺服电机;112、主动连杆;113、从动连杆;114、凹槽;115、琴弦压块;12、左手蜘蛛型卡座;121、滑槽;122、卡块;21、右手蜘蛛型卡座;22、拨弦机构;23、颤音敲击装置;211、拨弦槽口;212、敲击槽口;213、颤音槽口;214、支撑腿;215、定位腿;216、底板;221、吉他面板敲击片;222、吉他面板敲击电机;223、拨弦电机;224、拨片夹杆;231、颤音敲击电机;232、颤音敲击片;233、第一颤音敲击装置;234、第二颤音敲击装置;235、第三颤音敲击装置;236、第一平面板;237、第二平面板;
具体实施方式
46.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
47.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
48.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
49.请参阅图1-14,本发明提供一种技术方案:一种吉他机器人,包括左手机器人1、右手机器人2,左手机器人1、右手机器人2都通过t型卡固块4与吉他牢牢固定。
50.左手机器人1用来按压吉他的弦颈的不同部位来调节音色,即通过在不同位置按压琴颈,可以改变振动琴弦的长度和振动频率,其结构如图2所示(为了更直观的看到所有结构在这里隐藏了右半边的三组双连杆压弦机构),左手机器人1包括双连杆压弦系统11、左手蜘蛛型卡座12,左手机器人1通过左手蜘蛛型卡座12固定于吉他3左侧;如图3所示,左手蜘蛛型卡座12包括蜘蛛型底板、8个卡块、4个支撑腿,其中8个卡块不仅可以起到定位卡紧固定的作用,也可以起到支撑的作用,保证正常演奏时其位置也不会改变,8个卡块、4个支撑腿还可以减小了每个部件的重量,并因此减小了系统在过大的力的作用下倒塌的风险。
51.左手蜘蛛型卡座12的一侧设有与吉他3琴弦对应的多个滑槽121,左手蜘蛛型卡座12的另一侧上方固定双连杆压弦系统11,如图4-5所示,双连杆压弦系统11包括多组双连杆
压弦机构,双连杆压弦机构包括琴弦按压伺服电机111、主动连杆112、从动连杆113、琴弦压块115,琴弦按压伺服电机111的驱动轴与主动连杆112的一端连接,主动连杆112的另一端与从动连杆113的一端铰接,从动连杆113的另一端伸入其对应的滑槽121下方后与琴弦压块115固定。
52.当琴弦按压伺服电机111转动时,会带动与之相连的主动连杆112等角转动,从而带动与主动连杆112相连的从动连杆113动作,由于从动连杆113的另一端伸入其对应的滑槽121下方后与琴弦压块115固定,且琴弦压块115的宽度大于滑槽121,这样会将从动连杆113的运动限制在滑槽内,所以当琴弦按压伺服电机111驱动时,从动连杆113会在滑槽约束下沿平行于弦的水平直线运动,并且琴弦压块115始终处于压弦状态,在这种情况下,不需要提升从动连杆113,也不需要降低从动连杆113,从而可以减少所需的运动变量,仅使用最小数量的伺服电机便可,故而降低了制造成本。
53.右手机器人2用来拨动或击打琴弦来产生声音和通过电机的速度来控制声音的大小,如图6-7所示,右手机器人2包括右手蜘蛛型卡座21、多组拨弦机构22、多组颤音敲击装置23、多组吉他面板敲击装置,右手机器人2通过右手蜘蛛型卡座21固定于吉他3右侧,拨弦机构22、颤音敲击装置23、吉他面板敲击装置固定于右手蜘蛛型卡座21上。
54.左手蜘蛛型卡座12与右手蜘蛛型卡座21都是采用仿生蜘蛛腿的形状,这样可以大大提高安装的牢固性和使用时的稳定性,还能在承受功能部件的重力和拨动琴弦产生的反作用力时,能够保证良好的强度和刚度,减少变形,保证最佳的音质。
55.如图8所示,右手蜘蛛型卡座21包括底板216、四个卡块122、2个支撑腿214、4个定位腿215,底板216的四角处设有定位腿215,四个卡块122分别设置于底板216的两侧,2个支撑腿214设置于底板216的前端。
56.4个定位腿215则确保了右手蜘蛛型卡座21与吉他的相对位置,以保证演奏弦的部分和打击弦的部分与琴弦保持一个正确的相对位置,不会影响吉他的使用功能,同时还能避免意外发生,即使底板216损坏,整机也不会塌向吉他。
57.左手蜘蛛型卡座12与右手蜘蛛型卡座21都设有多个卡块122,卡块122与t型卡固块4搭配固定,卡块不仅可以起到支撑作用,还分担左手蜘蛛型卡座12或右手蜘蛛型卡座21部分的重力,减轻吉他上的负荷,保证正常演奏时不会损伤吉他;还可以与t型卡固块4配套使用,将吉他卡住,使左手蜘蛛型卡座12与右手蜘蛛型卡座21与吉他之间位置牢牢固定,正常演奏时其位置也不会改变。
58.如图9所示,t型卡固块4呈t型,t型卡固块4的一侧上设有多个螺纹孔,2个t型卡固块4分别置于卡块122两侧,且通过螺栓穿过t型卡固块4上的螺纹孔、卡块122上的安装孔进行固定,通过这种固定方式来固定吉他机器人相对于吉他的位置,这种设计也达到了易于组装和拆卸的要求,同时,由于螺栓是由密度较大的材料制成的,吉他机器人可以在演奏过程中增加机器的重量,从而减少琴弦受压时受到反作用力撞击并被弹离地面的不良影响。
59.如图10-11所示,拨弦机构22包括拨弦电机223、拨片夹杆224、吉他拨片;拨弦电机223的驱动轴与拨片夹杆224的一端连接,拨片夹杆224的另一端与吉他拨片通过槽口过盈配合。
60.由图10-11可以看出多组拨弦机构22并不是处于整个平面的正中位置,而是前平面安装了3组拨弦机构,后平面安装了3组拨弦机构,且交错设置,这是确保每个前平面上拨
弦电机223所连接的拨片不会与后平面上的产生干涉,根据吉他的设计标准,在拨动琴弦的区域中,相邻琴弦之间的间隔大约是10毫米。与拨弦电机223相比,这个距离正好是其宽度的一半,所以为了保证以上要求,只需要保证安装在前后平面的拨弦电机223错开,就满足了前平面最左伺服电机与后平面最左伺服电机左右相差10mm,也就符合了“一个拨弦电机负责一根琴弦”的设计要求。
61.此外,如图12所示,拨片夹杆224是一个可以容纳吉他拨片的零件,拨片夹杆224中槽口的缝隙宽度是通用型吉他拨片厚度的0.95倍,这种过盈配合可以将拨片牢牢地固定在裂缝中。这样设计的好处之一是可以随时更换拨片,减少了维护成本,同时拆装也更加方便省时。
62.如图10-11所示,吉他面板敲击装置包括吉他面板敲击电机222、吉他面板敲击片221,吉他面板敲击电机222的驱动轴与吉他面板敲击片221的一端连接,吉他面板敲击片221的另一端伸入右手蜘蛛型卡座21所开设的敲击槽口212下方。吉他面板敲击片221呈l型,这样的形状更便于敲击。
63.吉他面板敲击电机222驱动吉他面板敲击片221伸入敲击槽口212下方敲击吉他面板,来制造鼓声的效果。
64.颤音敲击装置23是右手部分用于负责击打动作的机械结构,其原理是利用颤音敲击电机带动颤音敲击片运动来实现拍打琴弦的动作,总结来说可以将这个动作可以分为两种情况。首先,敲击正在震动的琴弦可以立即停止它们发出的声音,这在音乐中叫做
‘
除颤’或者
‘
骤停’。第二,在琴弦不动的情况下,敲击琴弦会产生较大的颤音,同时还会产生类似低音大鼓的敲击声,这也是吉他指弹最常见的一种技能之一,被称为
‘
打弦’。
65.如图13所示,颤音敲击装置23包括颤音敲击电机231、颤音敲击片232,颤音敲击电机231的驱动端与颤音敲击片232的一端连接,颤音敲击片232的一端伸入右手蜘蛛型卡座21所开设的颤音槽口213下方。
66.如图14所示,颤音敲击装置23设有6组,包括第一颤音敲击装置233、第二颤音敲击装置234、第三颤音敲击装置235、第四颤音敲击装置、第五颤音敲击装置、第六颤音敲击装置,第一颤音敲击装置233与第六颤音敲击装置对称设置,第二颤音敲击装置234与第五颤音敲击装置对称设置,第三颤音敲击装置235与第四颤音敲击装置对称设置。
67.第一颤音敲击装置233通过第一平面板236与第二颤音敲击装置234固定,第二颤音敲击装置234与第一平面板236之间设有1个第二平面板237,第二颤音敲击装置234通过另一第一平面板236与第三颤音敲击装置235固定,第三颤音敲击装置235与另一第一平面板236之间设有2个第二平面板237。这样的设计方式采用多平面叠加方式,来保证相邻
‘
l’形颤音敲击片232之间10mm的平面距离来对应六根琴弦的间距。
68.本发明的另一个实施例中,主动连杆112与从动连杆113上还都设有凹槽114,这样设计一方面为了美观,另一方面可以这是用于减少材料重量,减小对吉他的伤害。
69.本发明的另一个实施例中,左手机器人1、右手机器人2还与控制器或电脑电性连接。通过向控制器或电脑电性输入控制指令来控制左手机器人1、右手机器人2协同作用演奏曲谱。
70.工作原理:使用时,控制器或电脑根据曲谱,控制左手机器人1、右手机器人22协同动作,需要按压吉他的弦颈时,控制与曲谱对应的琴弦按压伺服电机111动作,带动主动连
杆112和从动连杆113动作,使从动连杆113带动琴弦压块115在弦颈上滑动,到达指令位置,实现按压吉他的弦颈动作;需要击打琴弦时,控制与曲谱对应拨弦电机223动作,拨弦电机223带动拨片夹杆224转动,使吉他拨片拨动琴弦;需要敲击吉他面板时,则控制与曲谱对应吉他面板敲击电机222动作,吉他面板敲击电机222控制吉他面板敲击片221转动,敲击吉他面板;需要发出颤音时,则控制与曲谱对应颤音敲击电机231动作,颤音敲击电机231控制颤音敲击片232转动,敲出颤音。
71.在本发明的描述中,需要理解的是,指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
72.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
73.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1