一种电缆隧道智能巡检机器人
1.本发明涉及一种机器人领域,具体是一种电缆隧道智能巡检机器人。
背景技术:
2.随着社会的发展,电力的使用是我们生活必不可少的,而电缆隧道又与电有着密不可分的联系,电缆隧道就是指用于铺设电缆的隧道,电缆隧道用于容纳大量敷设在电缆支架上的电缆的走廊或隧道式构筑物,电缆隧道除了让隧道能更好地保护电缆,还能够使人们对电缆的检查和维修都很方便。
3.电缆隧道的优点很多,其中最明显的是它是一次性的投资建设,隧道里而有很多的电缆支架,隧道建成后,只需要按时检查就可以了,不用向相关部门提出新的计划。
4.在电缆隧道的所使用过程中,需要对电缆进行巡视工作,巡视作业大多在条件很差的电缆隧道内,作业环境差,劳动强度高,任务繁重,现有的方法完全依靠人力进行工作,耗时耗力,在用电高峰期和在特殊复杂的情况下,如夏季高温、冬季严寒时,人力短缺和安全生产问题也更加突出,因此需要用到一种可自动巡检的机器人用于代替工作人员对此的工作。
技术实现要素:
5.本发明的目的在于提供一种电缆隧道智能巡检机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种电缆隧道智能巡检机器人,所述电缆隧道智能巡检机器人包括:工作台,所述工作台呈中空设置且开设有通槽;摄像头,所述摄像头呈对称设置且固定安装在支撑板上,所述支撑板固定安装在传动杆上,所述传动杆上固定有螺旋限位块,所述传动杆还与用于驱动所述传动杆间歇转动并在竖直方向上做升降运动的限位组件连接,所述限位组件活动设置在所述工作台内且与所述螺旋限位块适配;往复机构,所述往复机构活动安装在所述工作台内且与所述限位组件连接,所述往复机构通过所述限位组件驱动所述传动杆运动;车轮,所述车轮呈对称设置且活动设置在所述缓冲组件上,所述缓冲组件活动安装在所述工作台上;转向机构,所述转向机构活动安装在所述工作台内且与所述缓冲组件连接。
7.作为本发明进一步的方案:所述限位组件包括固定安装在所述工作台内的中空杆和活动安装在所述传动杆上且开设有与所述螺旋限位块适配的螺旋槽的限位套筒以及一端铰接在所述限位套筒上另一端铰接在所述往复机构上且呈对称设置的铰接杆,所述传动杆活动安装在所述中空杆内。
8.作为本发明再进一步的方案:所述往复机构包括转动安装在所述工作台上且固定
有一号凸起的转盘和活动安装在所述工作台内且与所述一号凸起适配的导向组件以及固定安装在所述导向组件上的二号活动杆,所述二号活动杆上固定有连接块,所述连接块上铰接有所述铰接杆。
9.作为本发明再进一步的方案:所述导向组件包括固定安装在所述工作台上且呈对称设置的导向杆和活动安装在所述导向杆上的二号套筒以及固定安装在所述二号套筒之间且开设有与所述一号凸起适配的槽的二号连杆,所述二号连杆上固定有所述二号活动杆。
10.作为本发明再进一步的方案:所述缓冲组件包括转动安装在所述工作台底部且固定有限位杆的一号转动杆和套设在所述一号转动杆上且开设有与所述限位杆适配的限位槽的一号套筒以及固定安装在所述一号套筒内且与所述一号转动杆连接的弹簧,所述一号套筒上转动安装有所述车轮,所述一号转动杆贯穿所述工作台且与所述转向机构连接。
11.作为本发明再进一步的方案:所述转向机构包括固定安装在所述一号转动杆上的齿轮和固定安装在所述工作台内的固定套筒以及活动安装在所述固定套筒上且与所述齿轮啮合的齿条板,所述齿条板与所述工作台开设的通槽适配,所述工作台上还活动安装有与所述齿条板连接的转动组件。
12.作为本发明再进一步的方案:所述转动组件包括转动安装在所述工作台内的二号转动杆和固定安装在所述齿条板上且固定有二号凸起的一号活动杆以及活动安装在所述工作台内且与所述二号转动杆连接的动力结构,所述动力结构与所述二号凸起适配。
13.作为本发明再进一步的方案:所述动力结构包括固定安装在所述工作台上的气缸和固定安装在所述气缸上的限位柱以及转动安装在所述二号转动杆上且开设有与所述限位柱和所述二号凸起适配的槽的一号连杆。
14.与现有技术相比,本发明的有益效果是:在使用时,将机器人放置在需要巡检的隧道内,此时车轮转动,并驱动工作台在隧道内运动,当机器人遇到障碍物时,在缓冲组件的作用下,使得装个装置得到缓冲,从而提高装置的稳定性,并保证摄像头的相对稳定,同时往复机构运动,并驱动限位组件运动,从而带动传动杆间歇转动,限位组件还会驱动传动杆在竖直方向上做间歇升降运动,从而驱动支撑板运动,使得摄像头在转动一定角度后上升,并在停止上升后再次朝向初始位置转动,停止转动后做下降运动,重复上述运动,以使摄像头的拍摄范围更广,当需要转向时,此时转向机构工作,并驱动缓冲组件运动,从而带动车轮转动一定角度,实现装置的转向。
附图说明
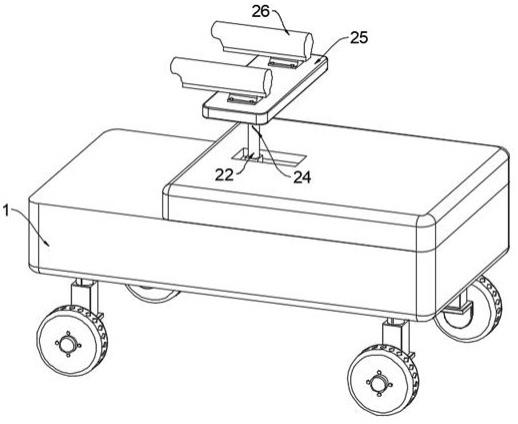
15.图1为电缆隧道智能巡检机器人一种实施例的结构示意图。
16.图2为电缆隧道智能巡检机器人一种实施例中摄像头、支撑板、工作台内的结构示意图。
17.图3为图2中a处的结构放大示意图。
18.图4为电缆隧道智能巡检机器人一种实施例中工作台的剖面结构示意图。
19.图5为电缆隧道智能巡检机器人一种实施例中缓冲组件、车轮、齿轮的结构爆炸示意图。
20.图中:1-工作台、2-一号转动杆、3-一号套筒、4-弹簧、5-车轮、6-齿轮、7-齿条板、
8-固定套筒、9-一号活动杆、10-气缸、11-限位柱、12-二号转动杆、13-一号连杆、14-转盘、15-导向杆、16-二号套筒、17-二号连杆、18-二号活动杆、19-连接块、20-铰接杆、21-中空杆、22-传动杆、23-限位套筒、24-螺旋限位块、25-支撑板、26-摄像头。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.另外,本发明中的元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
23.请参阅图1~5,本发明实施例中,一种电缆隧道智能巡检机器人,所述电缆隧道智能巡检机器人包括:工作台1,所述工作台1呈中空设置且开设有通槽;优选的,通槽开设在工作台1的一侧,且工作台1的上部还开设有槽,工作台1上还设置有空气质量传感器(图中未示出),从而对隧道内的空气进行时刻监测,此为现有技术的应用,本技术不做赘述。
24.摄像头26,所述摄像头26呈对称设置且固定安装在支撑板25上,所述支撑板25固定安装在传动杆22上,所述传动杆22上固定有螺旋限位块24,所述传动杆22还与用于驱动所述传动杆22间歇转动并在竖直方向上做升降运动的限位组件连接,所述限位组件活动设置在所述工作台1内且与所述螺旋限位块24适配;需要说明的是,所述限位组件包括固定安装在所述工作台1内的中空杆21和活动安装在所述传动杆22上且开设有与所述螺旋限位块24适配的螺旋槽的限位套筒23以及一端铰接在所述限位套筒23上另一端铰接在所述往复机构上且呈对称设置的铰接杆20,所述传动杆22活动安装在所述中空杆21内。
25.进一步来说,传动杆22上固定有呈对称设置的限位环,其中一个限位环与支撑板25贴合,当传动杆22运动至朝向中空杆21方向的最大行程处时,位于靠近中空杆21的限位环与中空杆21贴合,在往复机构的作用下,带动限位套筒23朝向远离中空杆21的方向运动,当限位套筒23运动至与螺旋限位块24适配位置时,在螺旋槽的作用下,驱动传动杆22转动,并驱动支撑板25转动,使得摄像头26转动,当限位套筒23与螺旋限位块24分离时,限位套筒23继续运动,并与限位环贴合,从而驱动传动杆22朝向远离中空杆21的方向运动,当运动至最大行程处时,在往复机构的作用下,驱动限位套筒23朝向初始位置运动。
26.优选的,由于传动杆22与中空杆21之间设置有阻尼套,当限位套筒23朝向中空杆21位置运动时,在阻尼套的作用下,传动杆22不会因重力发生运动,当限位套筒23再次与螺旋限位块24配合时,驱动传动杆22反转,当限位套筒23与螺旋限位块24分离并运动至限位环位置后,驱动传动杆22朝向中空杆21位置运动。
27.往复机构,所述往复机构活动安装在所述工作台1内且与所述限位组件连接,所述
往复机构通过所述限位组件驱动所述传动杆22运动;上述提到的所述往复机构包括转动安装在所述工作台1上且固定有一号凸起的转盘14和活动安装在所述工作台1内且与所述一号凸起适配的导向组件以及固定安装在所述导向组件上的二号活动杆18,所述二号活动杆18上固定有连接块19,所述连接块19上铰接有所述铰接杆20。
28.其中,所述导向组件包括固定安装在所述工作台1上且呈对称设置的导向杆15和活动安装在所述导向杆15上的二号套筒16以及固定安装在所述二号套筒16之间且开设有与所述一号凸起适配的槽的二号连杆17,所述二号连杆17上固定有所述二号活动杆18。
29.再进一步来说,当转盘14转动时,在一号凸起的作用下,驱动二号连杆17运动,并驱动二号套筒16在导向杆15上运动,在二号套筒16和导向杆15的作用下,驱动二号连杆17沿着导向杆15的长度方向运动,从而带动二号活动杆18运动,并通过连接块19驱动铰接杆20运动,在铰接杆20的作用下,使得限位套筒23运动。
30.优选的,工作台1内还安装有与转盘14连接的电机(图中未示出),用于驱动转盘14转动。
31.车轮5,所述车轮5呈对称设置且活动设置在所述缓冲组件上,所述缓冲组件活动安装在所述工作台1上;需要说明的是,所述缓冲组件包括转动安装在所述工作台1底部且固定有限位杆的一号转动杆2和套设在所述一号转动杆2上且开设有与所述限位杆适配的限位槽的一号套筒3以及固定安装在所述一号套筒3内且与所述一号转动杆2连接的弹簧4,所述一号套筒3上转动安装有所述车轮5,所述一号转动杆2贯穿所述工作台1且与所述转向机构连接。
32.再进一步来说,车轮5设置有四组,一号转动杆2也有四组,设置在其中一侧的一号转动杆2为转动安装且与转向机构连接,设置在另一侧的一号转动杆2为固定安装在工作台1底部,且在限位槽和限位杆的作用下,此处的一号套筒3无法转动,从而保证车轮5不会偏移,此处的一号套筒3上还安装有与车轮 5连接的马达(图中未示出),用于驱动车轮5转动,使得装置可在隧道内行进,当装置遇到凹凸不平的路面或路障时,在弹簧4的作用下,提供装置一定的缓冲力,使得装置保持相对稳定,从而保证摄像头26的稳定。
33.转向机构,所述转向机构活动安装在所述工作台1内且与所述缓冲组件连接。
34.需要说明的是,所述转向机构包括固定安装在所述一号转动杆2上的齿轮6和固定安装在所述工作台1内的固定套筒8以及活动安装在所述固定套筒8上且与所述齿轮6啮合的齿条板7,所述齿条板7与所述工作台1开设的通槽适配,所述工作台1上还活动安装有与所述齿条板7连接的转动组件。
35.还需要说明的是,所述转动组件包括转动安装在所述工作台1内的二号转动杆12和固定安装在所述齿条板7上且固定有二号凸起的一号活动杆9以及活动安装在所述工作台1内且与所述二号转动杆12连接的动力结构,所述动力结构与所述二号凸起适配。
36.其中,所述动力结构包括固定安装在所述工作台1上的气缸10和固定安装在所述气缸10上的限位柱11以及转动安装在所述二号转动杆12上且开设有与所述限位柱11和所述二号凸起适配的槽的一号连杆13。
37.最后来说,初始状态下,四组车轮5都保持同一角度,使得装置可按照直线行走,且在气缸10的作用下,使得一号连杆13保持固定状态,防止装置在行走过程中,由于颠簸而使
车轮5发生偏移,当需要调节装置位置时,此时气缸10工作,并驱动一号连杆13转动,从而带动二号转动杆12转动,在一号连杆13的作用下,驱动固定有二号凸起的两组限位柱11朝向相反的位置运动,且运动距离相等,在限位柱11的作用下,驱动两组齿条板7朝向相反的方向运动,由于齿条板7为相对设置,在齿条板7的作用下,使得两组齿轮6的转动方向相反,且转动角度相同,从而驱动一号转动杆2转动,并在限位杆和限位槽的作用下,驱动一号套筒3转动,使得两组车轮5发生偏转,从而实现方向的调节。
38.优选的,气缸10的运动是通过远程无线控制的,当需要转向时,工作人员可通过控制器发送信号至信号接收模块,从而驱动气缸10的运动,此为现有技术的应用,本技术不做赘述。
39.其中,在齿条板7的运动过程中,与工作台1开设的通槽适配,从而防止齿条板7与工作台1发生干涉。
40.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
41.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1