一种用于工业数控机床操控的工业机器臂的制作方法
1.本发明涉及机器臂技术领域,具体为一种用于工业数控机床操控的工业机器臂。
背景技术:
2.数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,用代码化的数字表示,通过信息载体输入数控装置。经运算处理由数控装置发出各种控制信号,控制机床的动作,按图纸要求的形状和尺寸,自动地将零件加工出来,且随着科技的不断发展,数控机床的操控与工业机器臂结合了起来,工业机械臂是拟人手臂、手腕和手功能的机械电子装置。它可把任一物件或工具按空间位姿的时变要求进行移动,从而完成某一工业生产的作业要求,而两者的结合进一步优化了数控机床操控的自动化程度,提升了工作效率,现有的工业机器臂其最外端的活动臂会安装依实际需求选用的卡爪,但是连接方式多为螺栓锁合或焊接等硬接触固定,卡爪维修或者更换过程也十分麻烦,耗时较长,降低整体设备的使用效率。
技术实现要素:
3.本发明提供了一种用于工业数控机床操控的工业机器臂,解决了上述背景技术中提出的问题。
4.本发明提供如下技术方案:一种用于工业数控机床操控的工业机器臂,包括第一底座、第二底座、底部机械臂、中端机械臂以及前端机械臂,所述底部机械臂、中端机械臂以及前端机械臂三者两两一端连接,所述底部机械臂的另一端连接在第二底座的顶部,所述第二底座与第一底座安装在一起,且第二底座与第一底座之间设置有复合型缓冲机构,所述前端机械臂的一端安装有延伸套管,且延伸套管一端的内侧分别套接有夹持部件和夹持动力部件,且夹持部件的一侧套接有受压支持部件,所述受压支持部件的一端螺纹连接有二次锁合部件。
5.精选的,所述夹持部件的内部包括有连接杆,且连接杆一端的内侧开设有调节槽,所述调节槽的内部固定套接有旋转轴,所述旋转轴中部表面卡接有夹持压杆。
6.精选的,所述夹持压杆一端的表面与延伸套管一端的内壁之间固定连接有第一压缩弹簧,且夹持压杆一端的内侧固定套接金属球体。
7.精选的,所述夹持动力部件的内部由电动推杆和磁铁顶板组成,且电动推杆的输出端与磁铁顶板的一侧固定连接,所述磁铁顶板另一侧的侧面与金属球体贴合。
8.精选的,所述受压支持部件的内部包括有连接套座,且连接套座的一侧分别开设有让位槽和固定连接有过渡连接板,所述过渡连接板的一端固定连接有卡爪安装板,且卡爪安装板的内部开设有安装孔,所述连接套座卡接在延伸套管一端内侧,且其内部活动套接在连接杆的外侧。
9.精选的,所述二次锁合部件由螺纹套管和扭板组成,且扭板固定连接在螺纹套管
的表面,所述螺纹套管螺纹连接在过渡连接板另一端的表面。
10.精选的,所述底部机械臂底部两侧的表面与第一底座两端的顶面之间均设置有位移监控机构,且位移监控机构的内部包括有顶压杆和压力传感器,且顶压杆的一端与压力传感器的一端贴合,所述顶压杆的另一端固定连接有多工位联动板,所述多工位联动板的一侧与底部机械臂底部的表面固定连接,所述压力传感器的表面固定连接有固定套板,所述固定套板的表面与底部机械臂的顶面固定连接。
11.精选的,所述复合型缓冲机构的内部包括有活动轴,且活动轴的顶部活动套接在第二底座顶部的内侧,所述活动轴底部的两侧均固定连接有一个弹性板,且两个弹性板之间固定连接有第二压缩弹簧,两个所述弹性板的一端均固定连接有一个摩擦板,所述摩擦板的底面与第一底座底部的内壁贴合。
12.本发明具备以下有益效果:
13.1、本发明通过所设置的延伸套管、夹持部件、夹持动力部件、受压支持部件以及二次锁合部件组装配合后,形成夹持锁合辅助机械臂,作为前端机械臂的延伸结构,后续除了为指定卡爪提供安装支撑和使用稳定支撑之外,其自身的延伸套管与受压支持部件在夹持动力部件、夹持部件以及二次锁合部件夹持锁合作用下可快速分离更换,缩短工作人员维修或更换的作业时长,提升整体设备的使用效率。
14.2、本发明通过设置两组位移监控机构在底部机械臂两侧的外部形成水平位移监控机构,后续使用过程中,两个位移监控机构内部的多组顶压杆与压力传感器的压力数值变化,可反映出底部机械臂在使用过程中相对于原坐标零点而产生的位移变化,尤其是在操作不当使底部机械臂、中端机械臂、前端机械臂以及夹持锁合辅助机械臂形成的完整工业机器臂被撞击的位移变化,以便工作人员及时发现,调整误差,适合精密零件加工。
15.3、本发明通过所设置的复合型缓冲机构,可对整体设备的震动进行多重减震消能,具体有弹性板与第二压缩弹簧往复弹性变形的减震缓冲,摩擦板与第一底座之间的摩擦消能。
附图说明
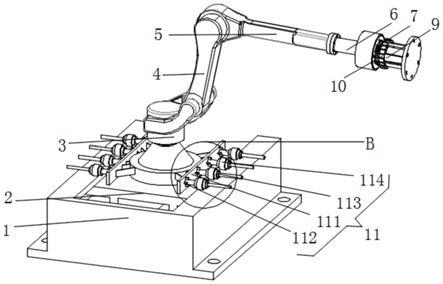
16.图1为本发明结构的正视示意图;
17.图2为本发明结构的后视示意图;
18.图3为本发明结构延伸套管的剖视示意图;
19.图4为本发明结构受压支持部件的正视示意图;
20.图5为本发明结构第二底座的右视示意图;
21.图6为本发明结构图3中a处的放大示意图;
22.图7为本发明结构图1中b处的放大示意图。
23.图中:1、第一底座;2、第二底座;3、底部机械臂;4、中端机械臂;5、前端机械臂;6、延伸套管;7、夹持部件;71、连接杆;72、调节槽;73、旋转轴;74、夹持压杆;75、第一压缩弹簧;76、金属球体;8、夹持动力部件;81、电动推杆;82、磁铁顶板;9、受压支持部件;91、连接套座;92、让位槽;93、过渡连接板;94、卡爪安装板;10、二次锁合部件;101、螺纹套管;102、扭板;11、位移监控机构;111、多工位联动板;112、顶压杆;113、压力传感器;114、固定套板;12、复合型缓冲机构;121、活动轴;122、弹性板;123、摩擦板;124、第二压缩弹簧。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.请参阅图1、图2、图7,一种用于工业数控机床操控的工业机器臂,包括第一底座1、第二底座2、底部机械臂3、中端机械臂4以及前端机械臂5,底部机械臂3、中端机械臂4以及前端机械臂5三者两两一端连接,底部机械臂3的另一端连接在第二底座2的顶部,第二底座2与第一底座1安装在一起,底部机械臂3底部两侧的表面与第一底座1两端的顶面之间均设置有位移监控机构11,且位移监控机构11的内部包括有顶压杆112和压力传感器113,且顶压杆112的一端与压力传感器113的一端贴合,顶压杆112的另一端固定连接有多工位联动板111,多工位联动板111的一侧与底部机械臂3底部的表面固定连接,压力传感器113的表面固定连接有固定套板114,固定套板114的表面与底部机械臂3的顶面固定连接,两组位移监控机构11在底部机械臂3两侧的外部形成水平位移监控机构,后续使用过程中,两个位移监控机构11内部的多组顶压杆112与压力传感器113的压力数值变化,可反映出底部机械臂3在使用过程中相对于原坐标零点而产生的位移变化,尤其是在操作不当使底部机械臂3、中端机械臂4、前端机械臂5以及夹持锁合辅助机械臂形成的完整工业机器臂被撞击的位移变化,以便工作人员及时发现,调整误差,适合精密零件加工。
26.请参阅图5,第二底座2与第一底座1之间设置有复合型缓冲机构12,复合型缓冲机构12的内部包括有活动轴121,且活动轴121的顶部活动套接在第二底座2顶部的内侧,活动轴121底部的两侧均固定连接有一个弹性板122,且两个弹性板122之间固定连接有第二压缩弹簧124,两个弹性板122的一端均固定连接有一个摩擦板123,摩擦板123的底面与第一底座1底部的内壁贴合,复合型缓冲机构12,可对整体设备的震动进行多重减震消能,具体有弹性板122与第二压缩弹簧124往复弹性变形的减震缓冲,摩擦板123与第一底座1之间的摩擦消能。
27.请参阅图3、图6,前端机械臂5的一端安装有延伸套管6,且延伸套管6一端的内侧分别套接有夹持部件7和夹持动力部件8,夹持部件7的内部包括有连接杆71,且连接杆71一端的内侧开设有调节槽72,调节槽72的内部固定套接有旋转轴73,旋转轴73中部表面卡接有夹持压杆74,夹持部件7具体将以机械受压传动的方式进行锁合作业,具体的锁合效果可靠且稳定。夹持压杆74一端的表面与延伸套管6一端的内壁之间固定连接有第一压缩弹簧75,第一压缩弹簧75可为夹持压杆74后续使用过程中的往复翻转提供复位动力,提升夹持压杆74使用的灵活性,且夹持压杆74一端的内侧固定套接金属球体76,金属球体76可扩展与后续设置的顶压部件的接触方向。
28.请参阅图3、图6,夹持动力部件8的内部由电动推杆81和磁铁顶板82组成,且电动推杆81的输出端与磁铁顶板82的一侧固定连接,磁铁顶板82可加强与上述金属球体76的连接强度,方便进行牵引作业,磁铁顶板82另一侧的侧面与金属球体76贴合,夹持动力部件8采用直线顶压的方式为夹持压杆74的翻转提供自动化动力,方便工作人员操作。
29.请参阅图4,夹持部件7的一侧套接有受压支持部件9,受压支持部件9的内部包括有连接套座91,且连接套座91的一侧分别开设有让位槽92和固定连接有过渡连接板93,过
渡连接板93的一端固定连接有卡爪安装板94,且卡爪安装板94的内部开设有安装孔,连接套座91卡接在延伸套管6一端内侧,且其内部活动套接在连接杆71的外侧,受压支持部件9是作为过渡连接条件,它一方面承接夹持部件7与夹持动力部件8配合产生的压力,另一方面为后续的卡爪提供安装条件。
30.请参阅图4,受压支持部件9的一端螺纹连接有二次锁合部件10,二次锁合部件10由螺纹套管101和扭板102组成,且扭板102固定连接在螺纹套管101的表面,螺纹套管101螺纹连接在过渡连接板93另一端的表面,二次锁合部件10配合受压支持部件9以螺纹锁合的方式对夹持压杆74的夹持进行二次锁合限位,上述的延伸套管、夹持部件、夹持动力部件、受压支持部件以及二次锁合部件组装配合后,形成夹持锁合辅助机械臂,作为前端机械臂的延伸结构,后续除了为指定卡爪提供安装支撑和使用稳定支撑之外,其自身的延伸套管与受压支持部件在夹持动力部件、夹持部件以及二次锁合部件夹持锁合作用下可快速分离更换,缩短工作人员维修或更换的作业时长,提升整体设备的使用效率。
31.工作原理:使用时,分多种情况,具体说明如下:
32.实施例一
33.当需要为卡爪提供安装时,可先将受压支持部件9内部的连接套座91套装到延伸套管6一侧内侧与夹持部件7之间的空隙中,而在套入过程中,为避免夹持压杆74干涉到连接套座91的的移动,可在连接套座91的套装之初,翻转夹持压杆74,使夹持压杆74与延伸套管6平行,此时的第一压缩弹簧75被压缩,待连接套座91套装到延伸套管6的内部后,启动夹持动力部件8内部的电动推杆81,继而由电动推杆81内部的伸缩杆推移磁铁顶板82进行直线移动,而移动过程中的磁铁顶板82将与夹持部件7内部的金属球体76接触并顶压,最终使夹持压杆74平行延伸套管6,且夹持压杆74的一端紧紧夹持在连接套座91一侧设置的让位槽92内部,接着拧转二次锁合部件10,使螺纹套管101在过渡连接板93的表面螺旋移动,继而与夹持压杆74一端的表面贴合,进行二次锁合固定,完成后,利用受压支持部件9内部的卡爪安装板94以及卡爪安装板94内部的安装孔提供卡爪的安装支撑条件。
34.实施例二
35.当整体设备在使用过程中因震动或因操作不当而撞击后,此时两组位移监控机构11内部的多个顶压杆112与压力传感器113之间的连接间歇会发生位移,具体可多个压力传感器113的压力数值变化结合看出,反映出底部机械臂3在使用过程中相对于原坐标零点而产生的位移变化,且顶压杆112与压力传感器113的具体数量依据实际使用需求设置。
36.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。同时在本发明的附图中,填充图案只是为了区别图层,不做其他任何限定。
37.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1