一种移动机器人抓取装置的制作方法
1.本发明提供一种移动机器人抓取装置,属于移动机器人技术领域。
背景技术:
2.移动机器人是一种广泛应用于物流、仓储领域对来料货物进行非人工、智能化分拣、储存的设备,移动机器人通过不同的分拣方法,经过有序的执行步骤来实现货物、包裹的智能化分拣,通过使用移动机器人的目的在于降低货物、包裹的分拣投递失误件数和失误率,借以提高分拣工作效率,但是现有的移动机器人抓取装置结构复杂,不方便移动,不能调节夹取范围且不能双侧夹持。针对这些问题本发明进行了改善。
技术实现要素:
3.本发明提供的一种移动机器人抓取装置,结构简单,并且可以解决不方便移动,不能调节夹取范围且不能双侧夹持的问题。
4.本发明为了解决上述问题,所提出的技术方案为:一种移动机器人抓取装置,包括设备主体、旋转机构、抓取机构,所述旋转机构用于旋转,所述抓取机构用于抓取,所述设备主体包括底座、设置在底座上方的放置板,所述旋转机构包括位于放置板上方的齿轮一、位于齿轮一一侧上方且与其相互齿合的齿轮二,所述齿轮一的下端固定连接有固定杆且固定杆的下端贯穿放置板固定连接在其内底部,所述齿轮二一侧固定连接有弯折连接杆且弯折连接杆上套设有套筒二,所述固定杆上套设有套筒一且套筒一贯穿放置板转动连接在其内底部,所述套筒一、套筒二通过连接杆固定连接,所述抓取机构包括通过连接件与弯折连接杆另一端固定连接的安装板一、与安装板一下端固定连接有安装板二,所述安装板二上两侧分别设置有凸起且凸起上分别铰接有夹持柄一,两个所述夹持柄一一端分别铰接有夹持柄二,所述底座与放置板之间设置有剪式升降架,所述剪式升降架设置有两个,两个所述剪式升降架一侧侧上下两端分别与底座、放置板通过连接件铰接,所述底座、放置板之间固定连接有电动伸缩杆一,所述底座内部设置有空腔且空腔内设置有移动结构,所述移动结构包括螺纹杆、连接杆、移动轮,所述螺纹杆上螺纹连接有两个螺纹套,两个所述螺纹套下端分别通过连接件与连接杆相互铰接。
5.所述放置板内部转动连接有蜗杆,所述放置板内部固定连接有电机一且电机一的输出端固定连接在蜗杆上,所述蜗杆啮合有位于其一侧的蜗轮,所述蜗轮固定连接在套筒一上。
6.所述套筒一两侧分别固定连接有固定杆,所述放置板上设置有圆形轨道,所述固定杆的下端设置在圆形轨道内。
7.所述安装板二下端两侧分别设置有凹槽,两个凹槽分别与两侧的夹持柄一之间夹持有圆柱物料。
8.所述安装板二一侧且位于安装板一下方设置有连接块,两个所述夹持柄二的上端分别铰接在连接块下端两侧,所述安装板二下端固定连接有电动伸缩杆二且电动伸缩杆二
的下端固定连接在连接块上。
9.所述底座、放置板的两侧且上下相对位置分别设置有滑槽,两个所述剪式升降架另一侧上下两端分别设置有滑块,所述滑块滑动连接在滑槽内。
10.所述移动轮上固定连接有固定柱,两个所述连接杆的另一端通过连接件与固定柱铰接,所述底座下端两侧分别设置有与空腔连通的活动槽,所述固定柱与移动轮活动连接在活动槽内,所述螺纹杆转动连接在空腔内且空腔内壁上固定连接有电机二,所述电机二输出端与螺纹杆固定连接。
11.其具体使用步骤如下:通过移动结构移动到合适位置;通过电动伸缩杆一配合剪式升降架调节高度;通过旋转机构中齿轮一配合齿轮二调节夹取范围;最后通过抓取机构配合夹持柄一、夹持柄二抓取物体。
12.本发明的有益效果:本发明结构简单,通过移动结构将本装置移动到合适的位置,解决了不方便移动的问题;通过旋转机构配合蜗轮、蜗杆的使用调节夹取的范围,解决了不能调节夹取范围的问题;通过安装板二配合夹持柄一、夹持柄二的设置,解决了不能双侧夹持的问题。
附图说明
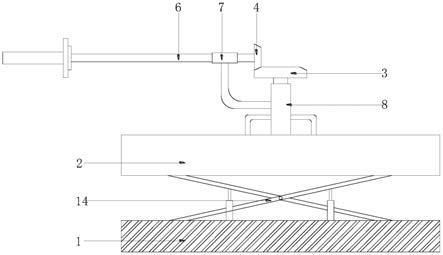
13.图1为本发明一种移动机器人抓取装置的结构示意图。
14.图2为本发明一种移动机器人抓取装置内部的结构示意图。
15.图3为本发明一种移动机器人抓取装置立体的结构示意图。
16.图4为本发明一种移动机器人抓取装置圆形轨道的结构示意图。
17.图5为本发明一种移动机器人抓取装置局部立体的结构示意图。
18.图6为本发明一种移动机器人抓取装置局部的结构示意图
19.图7为本发明一种移动机器人抓取装置局部a的结构示意图。
20.(1、底座;2、放置板;3、齿轮一;4、齿轮二;5、固定杆;6、弯折连接杆;7、套筒二;8、套筒一;9、安装板一;10、安装板二;11、凸起;12、夹持柄一;13、夹持柄二;14、剪式升降架;15、空腔;16、电动伸缩杆一;17、螺纹杆;18、连接杆;19、移动轮;20、螺纹套;21、蜗杆;22、电机一;23、蜗轮;24、凹槽;25、圆柱物料;26、连接块;27、电动伸缩杆二;28、固定柱;29、活动槽;30、电机二;31、圆形轨道;32、固定杆;33、滑槽)
具体实施方式
21.下面结合附图对本发明进一步说明。
22.根据图1所示:本发明提供了一种移动机器人抓取装置:包括设备主体、旋转机构、抓取机构,所述设备主体包括底座1、设置在底座1上方的放置板2,所述旋转机构包括位于放置板2上方的齿轮一3、位于齿轮一3一侧上方且与其相互齿合的齿轮二4,所述齿轮一3的下端固定连接有固定杆5且固定杆5的下端贯穿放置板2固定连接在其内底部,所述齿轮二4一侧固定连接有弯折连接杆6且弯折连接杆6上套设有套筒二7,所述固定杆5上套设有套筒一8且套筒一8贯穿放置板2转动连接在其内底部,所述套筒一8、套筒二7通过连接杆固定连接,所述抓取机构包括通过连接件与弯折连接杆6另一端固定连接的安装板一9、与安装板一9下端固定连接有安装板二10,所述安装板二10上两侧分别设置有凸起11且凸起11上分
别铰接有夹持柄一12,两个所述夹持柄一12一端分别铰接有夹持柄二13,所述底座1与放置板2之间设置有剪式升降架14,所述剪式升降架14设置有两个,两个所述剪式升降架14一侧侧上下两端分别与底座1、放置板2通过连接件铰接,所述底座1、放置板2之间固定连接有电动伸缩杆一16,所述底座1内部设置有空腔15且空腔15内设置有移动结构,所述移动结构包括螺纹杆17、连接杆18、移动轮19,所述螺纹杆17上螺纹连接有两个螺纹套20,两个所述螺纹套20下端分别通过连接件与连接杆18相互铰接;所述放置板2内部转动连接有蜗杆21,所述放置板2内部固定连接有电机一22且电机一22的输出端固定连接在蜗杆21上,所述蜗杆21啮合有位于其一侧的蜗轮23,所述蜗轮23固定连接在套筒一8上;所述套筒一8两侧分别固定连接有固定杆32,所述放置板2上设置有圆形轨道31,所述固定杆32的下端设置在圆形轨道31内;所述安装板二10下端两侧分别设置有凹槽24,两个凹槽24分别与两侧的夹持柄一12之间夹持有圆柱物料25;所述安装板二10一侧且位于安装板一9下方设置有连接块26,两个所述夹持柄二13的上端分别铰接在连接块26下端两侧,所述安装板二10下端固定连接有电动伸缩杆二27且电动伸缩杆二27的下端固定连接在连接块26上;所述底座1、放置板2的两侧且上下相对位置分别设置有滑槽33,两个所述剪式升降架14另一侧上下两端分别设置有滑块,所述滑块滑动连接在滑槽33内;所述移动轮19上固定连接有固定柱28,两个所述连接杆18的另一端通过连接件与固定柱28铰接,所述底座1下端两侧分别设置有与空腔15连通的活动槽29,所述固定柱28与移动轮19活动连接在活动槽29内,所述螺纹杆17转动连接在空腔15内且空腔15内壁上固定连接有电机二30,所述电机二30输出端与螺纹杆17固定连接。其具体使用步骤如下:通过移动结构移动到合适位置;通过电动伸缩杆一配合剪式升降架调节高度;通过旋转机构中齿轮一配合齿轮二调节夹取范围;最后通过抓取机构配合夹持柄一、夹持柄二抓取物体。
23.本发明的原理
24.综上所述:当需要对其移动时如图2、图7所示,启动电机二-带动螺纹杆-带动螺纹套-带动连接杆-带动固定柱-带动移动轮一侧活动槽,使移动轮接地使其便于移动,当调节高度时启动电动伸缩杆一-带动放置板及其附件上下调节其高度,同时剪式升降架单边上下位置的滑块在相对底座、放置板上的滑槽内移动,剪式升降架起到辅助支撑的作用,启动电机一-带动蜗杆-带动蜗轮-套筒一-带动套筒二转动,因齿轮一的下方固定连接有固定杆且固定杆的下端贯穿放置板固定连接在其内底部,故此齿轮一是不动的,套筒二带动弯折连接杆-带动齿轮二在齿轮一上转动,而齿轮二在齿轮一上转动的同时带动弯折连接杆在套筒二内转动-带动抓取机构移动,如图3、图6所示启动电动伸缩杆变长-带动连接块-带动夹持柄二-带动夹持柄一与安装板二的凹槽处远离,夹取东西,电动伸缩杆变短夹持住物体。本发明结构简单,并且可以解决不方便移动,不能调节夹取范围且不能双侧夹持的问题。
25.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1