一种快速识别目标人工智能机器人的制作方法
1.本发明涉及人工智能领域,尤其涉及一种快速识别目标人工智能机器人。
背景技术:
2.随着科学技术的发展,人们在ai技术取得了极大的成功,并且目前已经研发出了可以与人进行智能交互的机器人,这些机器人具备一定的自主能力,可以有效的为人们进行服务,目前常见的人工智能交互机器人大多为咨询服务类、与智能聊天类机器人。
3.目前人工智能广泛应用于人类生活中,但是在儿童教育领域人工智能机器人还处于初始发展阶段,目前的人工智能机器人不具备对物品进行识别和教学展示的功能,人工智能机器人在孩童教育方面具有良好的发展前景。
技术实现要素:
4.本发明提出的一种快速识别目标人工智能机器人,解决了目前的人工智能机器人不具备对物品进行识别和教学展示的功能的问题。
5.为了实现上述目的,本发明采用了如下技术方案:一种快速识别目标人工智能机器人,包括躯干、头部和安装在躯干底部的脚部支架,所述躯干顶部设置有可活动的头部支架,所述头部安装在头部支架上,所述头部正面安装有显示屏,所述头部内分别安装有麦克风、语音识别传感器和主控机,所述躯干的正面固定有摄像防护架,所述摄像防护架上安装有视频摄像传感器,所述视频摄像传感器的正下方设有物品放置板,所述躯干的内部分别安装有主板和扬声器。
6.该智能机器人通过设置视频摄像传感器对放置在物品放置板上的物品进行摄像拍照并通过主题数据库进行对比,实现对目标的快速识别并进行语音播报,能够辅助儿童识别日常使用物品,并进行图片展示,视频讲解,辅助孩童认知事物,趣味性强,能够激发孩童学习乐趣,教学效果佳;作为本发明的一种优选方案,所述主板上分别设有智能主题数据库芯片和数据存储芯片,所述主控机内分别设有智能数据采集模块、智能数据分析模块以及智能数据应用模块。
7.作为本发明的一种优选方案,所述躯干的内部安装有伺服电机,所述伺服电机的输出轴连接有扇形齿轮,所述头部支架的底部两侧铰接有对称设置的活动杆,所述活动杆的端部均连接有齿条,且所述齿条均与扇形齿轮啮合,所述躯干的内部固定有两个伸缩杆,所述伸缩杆的端部固定有导向套,所述导向套滑动套设在相应的活动杆上。
8.作为本发明的一种优选方案,所述躯干的内部设有清理机构,所述清理机构包括固定在躯干内的两个气筒、滑动连接在气筒内的活塞、连接活塞并与相应的齿条固定连接的连接推杆、连接在气筒出气口的软管、固定在躯干内的连接管以及连接在连接管两端的气管头,且所述软管的另一端分别与相应的气管头连接。
9.作为本发明的一种优选方案,所述躯干的内部还设有定时保养机构,所述定时保
养机构包括固定在扇形齿轮上的凸轮、滑动连接在躯干内与凸轮正对的受压活动块、安装在躯干内用于复位受压活动块的复位弹簧、安装在受压活动块底部的触头、与触头正对的计时器、安装在摄像防护架上的润滑液存储盒、固定安装在润滑液存储盒顶部的微型气泵、连接在润滑液存储盒出液口的导液管以及设置在连接管两端的电磁阀和设置在气管头上的单向止逆阀,且所述导液管的另一端与连接管的中部连接。
10.作为本发明的一种优选方案,所述头部支架的顶部开设有安装槽,所述安装槽内安装有微型马达,所述微型马达的输出轴固定连接在头部的底部。
11.作为本发明的一种优选方案,所述躯干的内部固定安装有电动推杆,所述电动推杆的推杆与物品放置板固定连接,所述躯干上开设有供物品放置板滑动的滑槽。
12.作为本发明的一种优选方案,所述躯干的顶部开设有供活动杆活动的开口,所述活动杆上均滑动连接有密封挡板,所述活动杆上均套设有用于压紧密封挡板的压紧弹簧。
13.本发明中:该种快速识别目标人工智能机器人通过设置视频摄像传感器对放置在物品放置板上的物品进行摄像拍照并通过主题数据库进行对比,实现对目标的快速识别并进行语音播报,能够辅助儿童识别日常使用物品,并进行图片展示,视频讲解,辅助孩童认知事物,趣味性强,能够激发孩童学习乐趣,教学效果佳;该种快速识别目标人工智能机器人通过利用扇形齿轮往复运动啮合两个齿条上下摆动,实现头部点头动作,利用微型马达实现头部转头动作,能够达到与孩童互动效果,提高整个机器人的教学趣味性;该机器人在进行上下点头动作时,同时带动气筒加压出气,使得两个气管头往复进行吸气和吐气动作,能够清理粘附在扇形齿轮和齿条上的灰尘杂质,提高智能机器人的使用寿命;该机器人通过计时器统计扇形齿轮转动次数,当达到一定保养周期次数时,自动控制气管头排出润滑液,对扇形齿轮和齿条啮合部位进行润滑,实现自动保养。
附图说明
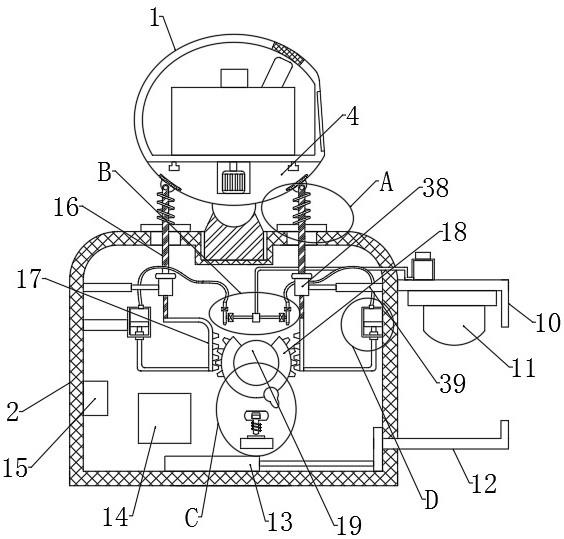
14.图1为本发明的整体结构示意图;图2为本发明机器人头部的内部结构示意图;图3为本发明机器人头部及躯干的剖视图;图4为本发明图3中a处的结构放大图;图5为本发明图3中b处的结构放大图;图6为本发明图3中c处的结构放大图;图7为本发明图3中d处的结构放大图;图8为本发明清理机构和定时保养机构的结构示意图;图9为本发明的工作流程框图。
15.图1-9中:1、头部;2、躯干;3、脚部支架;4、头部支架;5、微型马达;6、显示屏;7、麦克风;8、语音识别传感器;9、主控机;10、摄像防护架;11、视频摄像传感器;12、物品放置板;13、电动推杆;14、主板;15、扬声器;16、活动杆;17、齿条;18、扇形齿轮;19、伺服电机;20、连接推杆;21、气筒;22、活塞;23、软管;24、气管头;25、连接管;26、润滑液存储盒;27、微型气
泵;28、导液管;29、单向止逆阀;30、电磁阀;31、密封挡板;32、压紧弹簧;33、凸轮;34、受压活动块;35、触头;36、复位弹簧;37、计时器;38、导向套;39、伸缩杆。
具体实施方式实施例
16.参照图1-9,本发明提供一种快速识别目标人工智能机器人,包括一种快速识别目标人工智能机器人,包括躯干2、头部1和安装在躯干2底部的脚部支架3,躯干2顶部设置有可活动的头部支架4,头部1安装在头部支架4上,头部1正面安装有显示屏6,头部1内分别安装有麦克风7、语音识别传感器8和主控机9,躯干2的正面固定有摄像防护架10,摄像防护架10上安装有视频摄像传感器11,视频摄像传感器11的正下方设有物品放置板12,躯干2的内部分别安装有主板14和扬声器15,主板14上分别设有智能主题数据库芯片和数据存储芯片,主控机9内分别设有智能数据采集模块、智能数据分析模块以及智能数据应用模块。
17.该智能机器人通过设置视频摄像传感器11对放置在物品放置板12上的物品进行摄像拍照并通过智能主题数据库进行对比,实现对目标的快速识别并进行语音播报,能够辅助儿童识别日常使用物品,并进行图片展示,视频讲解,辅助孩童认知事物,趣味性强,能够激发孩童学习乐趣,教学效果佳。
18.躯干2的内部安装有伺服电机19,伺服电机19的输出轴连接有扇形齿轮18,头部支架4的底部两侧铰接有对称设置的活动杆16,活动杆16的端部均连接有齿条17,且齿条17均与扇形齿轮18啮合,躯干2的内部固定有两个伸缩杆39,伸缩杆39的端部固定有导向套38,导向套38滑动套设在相应的活动杆16上。通过利用扇形齿轮18往复运动啮合两个齿条17上下摆动,实现头部1点头动作,能够达到与孩童互动效果,提高整个机器人的教学趣味性。
19.躯干2的内部设有清理机构,清理机构包括固定在躯干2内的两个气筒21、滑动连接在气筒21内的活塞22、连接活塞22并与相应的齿条17固定连接的连接推杆20、连接在气筒21出气口的软管23、固定在躯干2内的连接管25以及连接在连接管25两端的气管头24,且软管23的另一端分别与相应的气管头24连接,该机器人在进行上下点头动作时,同时带动气筒21加压出气,使得两个气管头24往复进行吸气和吐气动作,能够清理粘附在扇形齿轮18和齿条17上的灰尘杂质,提高智能机器人的使用寿命。
20.躯干2的内部还设有定时保养机构,定时保养机构包括固定在扇形齿轮18上的凸轮33、滑动连接在躯干2内与凸轮33正对的受压活动块34、安装在躯干2内用于复位受压活动块34的复位弹簧36、安装在受压活动块34底部的触头35、与触头35正对的计时器37、安装在摄像防护架10上的润滑液存储盒26、固定安装在润滑液存储盒26顶部的微型气泵27、连接在润滑液存储盒26出液口的导液管28以及设置在连接管25两端的电磁阀30和设置在气管头24上的单向止逆阀29,且导液管28的另一端与连接管25的中部连接,通过计时器37统计扇形齿轮18转动次数,当达到一定保养周期次数时,自动控制气管头24排出润滑液,对扇形齿轮18和齿条17啮合部位进行润滑,实现自动保养。
21.头部支架4的顶部开设有安装槽,安装槽内安装有微型马达5,微型马达5的输出轴固定连接在头部1的底部,利用微型马达5实现头部1转头动作,能够达到与孩童互动效果,提高整个机器人的教学趣味性。
22.躯干2的内部固定安装有电动推杆13,电动推杆13的推杆与物品放置板12固定连接,躯干2上开设有供物品放置板12滑动的滑槽,利用主控机9控制电动推杆13,实现物品放置板12的自动打开和收起。
23.躯干2的顶部开设有供活动杆16活动的开口,活动杆16上均滑动连接有密封挡板31,活动杆16上均套设有用于压紧密封挡板31的压紧弹簧32,当该机器人点头时,通过压紧弹簧32紧压密封挡板31,使密封挡板31将开口封住,防止机器人内部进灰。
24.工作原理:使用该机器人时,语音识别传感器8可识别外部语音并对整个机器人进行ai智能控制,当孩童遇到未知物品时,将物品放置在物品放置板12上,视频摄像传感器11进行录像并输送主控机9数据采集模块,经过与智能主题数据库对比和分析,辨别出该物品并进行语音播报同时经显示屏6显示该物品图片以及视频介绍等,帮助孩童进行认知,该机器人还可与孩童进行互动,认知结束后机器人语音播报并显示出相应物品图片,孩童对物品名进行回答,如回答正确,主控机9控制伺服电机19带动扇形齿轮18往复转动,使得两个齿条17带动两活动杆16往复上下交错运动,实现头部1点头动作表示赞同,如回答错误,则微型马达5控制头部1往复转动进行摇头,孩童重新作答并给出相应提示,提高与孩童的互动,激发孩童学习兴趣,在机器人头部1点头时,通过连接推杆20带动活塞22运动使两个气筒21分别加压和减压,此时两个气管头24往复进行吸气和吐气动作,对扇形齿轮18和齿条17啮合部位的灰尘进行清理,防止灰尘大面积粘附,影响机器人使用寿命,在扇形齿轮18工作时凸轮33作用于受压活动块34,当凸轮33离开受压活动块34后复位弹簧36复位活动块,扇形齿轮18转动一个周期触头35与计时器37开关触点接触两次,计时器37统计扇形齿轮18转动次数,当达到一定保养周期后,连接管25上的两电磁阀30打开,微型气泵27将润滑液存储盒26内的润滑液通过两气管头24滴出在扇形齿轮18和齿条17啮合处进行润滑,保养后电磁阀30关闭即可,提高整个机器使用寿命。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1