越障式提升机钢丝绳检测机器人及越障方法与流程
越障式提升机钢丝绳检测机器人及越障方法
1.技术领域
2.本发明属于矿井提升装备钢丝绳无损检测技术领域,尤其是涉及一种越障式提升机钢丝绳检测机器人及越障方法。
背景技术:
3.钢丝绳作为承载和配重的核心构件,是矿井提升机的“咽喉”。在长期作业过程中易出现断丝、磨损等损伤。钢丝绳的损伤检测可靠性,直接关系到提升系统的安全运行,因此需要定期检查和维护。现有钢丝绳检测机器人包括基于机器视觉检测法、基于磁检测等,如专利授权号为cn201510381205.3的基于机器视觉检测法的机器人,通过驱动机构和夹紧机构实现机器人在钢丝绳上的稳定爬行,通过搭载移动小车、本安摄像头和云台实现对钢丝绳损伤全角度的图像采集。如专利授权号为cn202994776u的轮式钢丝绳检测机器人,通过滚轮行走机构和拉紧机构实现机器人在钢丝绳的稳定爬行,通过搭载传感器实现钢丝绳的损伤检测。如专利申请号为cn202110249464.6的磁吸附履带检测机器人,通过具有磁性的履带机构和张紧机构,实现机器人在钢丝绳上的稳定爬行和对钢丝绳磁化功能,并搭载漏磁检测传感器,实现对钢丝绳损伤的检测。
4.然而,上述钢丝绳检测机器人在巡检时,面临如下问题:第一,由于部分矿井中,有些被测钢丝绳穿过罐道梁、钢梁等构件,导致攀爬机器人难以直接通过,而现有的钢丝绳检测机器人缺乏越障能力,导致井筒中有障碍的绳段疏于检测,难以全面、系统的进行整根检测,造成安全隐患;第二,由于各矿井的开采工况不同,被测的钢丝绳包含不同直径的尾绳和罐道绳,导致攀爬机器人需要适应不同直径钢丝绳的攀爬;第三,随着服役年限的积累,被测钢丝绳容易出现断丝突起等工况,干扰机器人的平稳攀爬巡检,甚至导致机器人卡住,难以继续攀爬。第四,采用机器视觉检测法无法检测到钢丝绳内部损伤,且由于钢丝绳外表面油污的影响,检测准确率不高。因而,本发明提出一种越障式提升机钢丝绳检测机器人及越障方法,旨在使探伤攀爬机器人具备一定的越障能力,能够平稳可靠地沿被测钢丝绳轴向攀爬并实现钢丝绳内部、外部的无损检测。
技术实现要素:
5.本发明的目的是提出一种越障式提升机钢丝绳检测机器人及越障方法,使探伤攀爬机器人具有一定的越障能力,能够自主识别和跨越障碍物,适应不同直径的钢丝绳攀爬,同时能够平稳地跨越断丝突起,从而高效、准确、全面、系统的检测整根钢丝绳。
6.本发明的目的是通过下述技术方案来实现的:本发明的越障式提升机钢丝绳检测机器人,其特征在于包括上部机架,与此上部机架通过连接杆连接的下部机架,贯穿在所述上部机架和下部机架中部的钢丝绳,设置在所述上部机架上的钢丝绳磁化仪,设置在所述下部机架上的钢丝绳探伤仪,分别设置在所
述上部机架和下部机架上的视觉模块、越障装置、电磁锁装置、连接栓和调节张紧装置,所述的上部机架和下部机架通过电磁锁装置实现打开和闭合,所述的上部机架的左半部和右半部分别与所述的刚丝绳磁化仪套筒的左半部分和右半部分通过连接栓固定连接,所述的下部机架的左半部和右半部分别与所述的刚丝绳探伤仪套筒的左半部分和右半部分通过连接栓固定连接。
7.所述的越障装置包括通过螺栓固定在所述上部机架和下部机架端盖上的旋转电机,与此旋转电机输出轴相连接的旋转齿轮,内齿轮与此旋转齿轮相啮合的中空旋转平台,固定在所述上部机架和下部机架端盖上的中空旋转平台轨道,设置在所述中空旋转平台上的移动电机和移动平台轨道,通过轴承座与所述移动电机相连接的滚珠丝杠装置,与此滚珠丝杠装置相连接的移动平台,所述的中空旋转平台沿所述的中空旋转平台轨道转动,所述的移动平台沿所述的移动平台轨道滑动,所述的调节张紧装置包括调节张紧电机,与此调节张紧电机相连接的调节张紧齿轮,与所述的上部机架和下部机架固定连接的调节装置活塞腔,设置在此调节装置活塞腔内且与调节装置活塞腔滑动连接的调节装置,与此调节装置固定连接的齿条和张紧装置活塞腔,一端设置在此张紧装置活塞腔内且与张紧装置活塞腔滑动连接的张紧装置,设置在所述张紧装置活塞腔和张紧装置之间的张紧弹簧,设置在所述张紧装置另一端的滚轮轴和滚轮装置,所述的调节张紧齿轮与所述的齿条相啮合。
8.所述的连接杆为六根。
9.所述的上部机架和下部机架设有张紧电机搭载平台、电池搭载平台和无线通讯搭载平台。
10.所述的滚轮轴与轮毂电机相连接。
11.一种基于越障式提升机钢丝绳检测机器人的越障方法,其特征在于,具体步骤包括:(1)无障碍物巡检:当机器人行进方向上没有障碍物时,通过调节张紧装置中的调节装置和张紧装置,实现对不同直径钢丝绳的抱紧,通过轮毂电机提供动力,实现机器人在钢丝绳上的稳定爬行,通过钢丝绳磁化仪实现对钢丝绳的磁化,通过钢丝绳探伤仪实现对钢丝绳的损伤检测;(2)障碍物识别:当视觉模块检测到爬行前方存在障碍物时,制停轮毂电机,视觉检测障碍物最窄跨越距离和最宽跨越距离,通过与预设最大跨越距离比较,若预设最大跨越距离小于最窄跨越距离,判定为无法越障,轮毂电机回转,沿原路径返回;若预设最大跨越距离在最窄跨越距离和最宽跨越距离之间,判定为调节越障,先进行位姿矫正,调整到合适的跨越路径,再进行障碍物越障;若预设最大跨越距离大于最宽跨越距离,则进行障碍物越障;(3)位姿矫正:当判定为调节越障时,先进行位姿矫正,下部机架的调节张紧电机启动,使调节张紧装置的滚轮装置前伸,增大滚轮装置与钢丝绳的预紧,上部机架的电磁锁装置打开,启动下部机架的移动电机,使下部机架的移动平台沿移动平台轨道向外移动,通过连接杆带动上部机架的左半部和右半部向外移动;启动下部机架的旋转电机,使下部机
架的移动平台旋转到合适的跨越角度;启动下部机架的移动电机,使下部机架的移动平台沿移动平台轨道向内移动,通过连接杆带动上部机架的左半部和右半部向内移动,上部机架的电磁锁装置闭合,上部机架的调节张紧电机启动,增大滚轮装置与钢丝绳的预紧,将上部机架的开合线调节到合适跨越角度;下部机架的旋转电机启动,使下部机架的移动平台旋转到初始状态;启动下部机架的调节张紧电机,减小滚轮装置与钢丝绳的预紧,打开下部机架的电磁锁装置,启动上部机架的移动电机,使上部机架的移动平台沿移动平台轨道向外移动,通过连接杆带动下部机架的左半部和右半部向外移动;启动上部机架的旋转电机,使上部机架的移动平台旋转到合适的跨越角度;启动上部机架的移动电机,使上部机架的移动平台沿移动平台轨道向内移动,下部机架的电磁锁装置闭合,启动下部机架的调节张紧电机,增大滚轮装置与钢丝绳的预紧,实现了下部机架的开合线调节到合适跨越角度,完成上部机架和下部机架的位姿矫正;(4)障碍物越障:当机器人完成位姿矫正,或者预设最大跨越距离大于最宽跨越距离时,开始进行障碍物越障;启动上部机架的调节张紧电机,减小滚轮装置与钢丝绳的预紧,打开上部机架的电磁锁装置,启动下部机架的移动电机,使下部机架的移动平台沿移动平台轨道向外移动,通过六根连接杆带动上部机架的左半部和右半部向外移动;启动下部机架的轮毂电机,启动下部机架攀爬钢丝绳,使上部机架跨越障碍物;当上部机架跨越障碍物后,制停下部机架轮毂电机,启动下部机架的移动电机,使下部机架的移动平台沿移动平台轨道向内移动,上部机架的电磁锁装置闭合,启动上部机架的调节张紧电机正转,增大滚轮装置与钢丝绳的预紧;启动下部机架的调节张紧电机,减小滚轮装置与钢丝绳的预紧,打开下部机架的电磁锁装置,启动上部机架的移动电机,使上部机架的移动平台沿移动平台轨道向外移动,通过六根连接杆带动下部机架的左半部和右半部向外移动,启动上部机架的轮毂电机,使下部机架跨越障碍物;当下部机架跨越障碍物后,制停上部机架的轮毂电机,启动上部机架的移动电机,使上部机架的移动平台沿移动平台轨道向内移动,通过六根连接杆带动下部机架的左半部和右半部向内移动,闭合下部机架的电磁锁装置,启动下部机架的调节张紧电机,增大滚轮装置与钢丝绳的预紧,障碍物越障结束,探伤攀爬机器人继续正常爬行。
12.本发明的优点:(1)本发明的越障式提升机钢丝绳检测机器人及越障方法,可使探伤攀爬机器人跨越罐道梁、钢梁等障碍物,有效解决存在障碍物的绳段难以检测的难题,有利于人全面、系统地检测整根钢丝绳;(2)本发明的越障式提升机钢丝绳检测机器人及越障方法,采用分体式布置,利用上部机架和下部机架交替夹持钢丝绳,采用回转机构进行位姿矫正,通过轮毂电机驱动机体实现了高效可靠越障;(3)本发明的越障式提升机钢丝绳检测机器人及越障方法,张紧调节装置通过多轴同步向心夹持的方式,使攀爬机器人能够适应不同直径的钢丝绳,使得机器人的通用性更强,利用张紧弹簧的柔性伸缩,可使机器人具备一定的钢丝绳断丝突起越障能力;(4)本发明的越障式提升机钢丝绳检测机器人及越障方法,利用机器视觉判断前方是否有障碍物,判断是否可以跨越障碍物及通过障碍物截面形状选择最优跨越路径,自主旋转调节越障和直接越障的方式,有效帮助探伤攀爬机器人探测前方障碍物的情况从而
做出决策;(5)本发明的越障式提升机钢丝绳检测机器人及越障方法,滚轮装置采用轮毂电机,节约了攀爬机器人的内部空间,从而减小了整个机器人的体积,提高了狭窄井下空间机器人的爬行适应性;(6)本发明的越障式提升机钢丝绳检测机器人及越障方法,基于弱磁原理检测,不仅可以对钢丝绳内部和外部的钢丝绳进行损伤检测,还可以大大降低机器人的整体质量。
附图说明
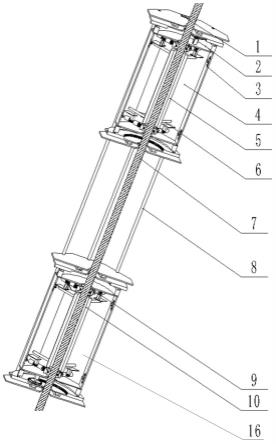
13.图1为本发明的结构示意图。
14.图2为本发明的调节张紧装置的布置图。
15.图3为本发明的越障装置的结构示意图。
16.图4为本发明的调节张紧装置的结构示意图。
17.图5为本发明的图4的剖面视图。
18.图6-图17为本发明实施例的不同越障过程图。
19.图18为本发明的越障流程图。
具体实施方式
20.下面结合附图进一步说明本发明的具体实施方式。
21.如图1-18所示,本发明的越障式提升机钢丝绳检测机器人,其特征在于包括上部机架4,与此上部机架4通过连接杆8连接的下部机架16,贯穿在所述上部机架4和下部机架16中部的钢丝绳7,设置在所述上部机架4上的钢丝绳磁化仪5,设置在所述下部机架16上的钢丝绳探伤仪10,分别设置在所述上部机架4和下部机架16上的视觉模块1、越障装置2、电磁锁装置3、连接栓6和调节张紧装置9,所述的上部机架4和下部机架16通过电磁锁装置3实现打开和闭合,所述的上部机架4的左半部和右半部分别与所述的刚丝绳磁化仪5套筒的左半部分和右半部分通过连接栓6固定连接,所述的下部机架16的左半部和右半部分别与所述的刚丝绳探伤仪10套筒的左半部分和右半部分通过连接栓6固定连接。
22.所述的越障装置2包括通过螺栓固定在所述上部机架4和下部机架16端盖上的旋转电机204,与此旋转电机204输出轴相连接的旋转齿轮205,内齿轮与此旋转齿轮205相啮合的中空旋转平台202,固定在所述上部机架4和下部机架16端盖上的中空旋转平台轨道206,设置在所述中空旋转平台202上的移动电机203和移动平台轨道207,通过轴承座208与所述移动电机203相连接的滚珠丝杠装置209,与此滚珠丝杠装置209相连接的移动平台201,所述的中空旋转平台202沿所述的中空旋转平台轨道206转动,所述的移动平台201沿所述的移动平台轨道207滑动,所述的调节张紧装置9包括调节张紧电机14,与此调节张紧电机14相连接的调节张紧齿轮13,与所述的上部机架4和下部机架16固定连接的调节装置活塞腔901,设置在此调节装置活塞腔901内且与调节装置活塞腔901滑动连接的调节装置905,与此调节装置905固定连接的齿条902和张紧装置活塞腔906,一端设置在此张紧装置活塞腔906内且与张紧
装置活塞腔906滑动连接的张紧装置904,设置在所述张紧装置活塞腔906和张紧装置904之间的张紧弹簧903,设置在所述张紧装置904另一端的滚轮轴908和滚轮装置907,所述的调节张紧齿轮13与所述的齿条902相啮合。
23.所述的连接杆8为六根。
24.所述的上部机架4和下部机架16设有张紧电机搭载平台11、电池搭载平台12和无线通讯搭载平台15。
25.所述的滚轮轴908与轮毂电机909相连接。
26.一种基于越障式提升机钢丝绳检测机器人的越障方法,其特征在于,具体步骤包括:(1)无障碍物巡检:当机器人行进方向上没有障碍物时,通过调节张紧装置9中的调节装置905和张紧装置904,实现对不同直径钢丝绳7的抱紧,通过轮毂电机909提供动力,实现机器人在钢丝绳7上的稳定爬行,通过钢丝绳磁化仪5实现对钢丝绳7的磁化,通过钢丝绳探伤仪10实现对钢丝绳7的损伤检测;(2)障碍物识别:当视觉模块1检测到爬行前方存在障碍物时,制停轮毂电机909,视觉检测障碍物最窄跨越距离和最宽跨越距离,通过与预设最大跨越距离比较,若预设最大跨越距离小于最窄跨越距离,判定为无法越障,轮毂电机909回转,沿原路径返回;若预设最大跨越距离在最窄跨越距离和最宽跨越距离之间,判定为调节越障,先进行位姿矫正,调整到合适的跨越路径,再进行障碍物越障;若预设最大跨越距离大于最宽跨越距离,则进行障碍物越障;(3)位姿矫正:当判定为调节越障时,先进行位姿矫正,下部机架16的调节张紧电机14启动,使调节张紧装置9的滚轮装置907前伸,增大滚轮装置907与钢丝绳7的预紧,上部机架4的电磁锁装置3打开,启动下部机架16的移动电机203,使下部机架16的移动平台201沿移动平台轨道207向外移动,通过连接杆8带动上部机架4的左半部和右半部向外移动;启动下部机架16的旋转电机204,使下部机架16的移动平台201旋转到合适的跨越角度;启动下部机架16的移动电机203,使下部机架16的移动平台201沿移动平台轨道207向内移动,通过连接杆8带动上部机架4的左半部和右半部向内移动,上部机架4的电磁锁装置3闭合,上部机架4的调节张紧电机14启动,增大滚轮装置907与钢丝绳7的预紧,将上部机架4的开合线调节到合适跨越角度;下部机架16的旋转电机204启动,使下部机架16的移动平台201旋转到初始状态;启动下部机架16的调节张紧电机14,减小滚轮装置907与钢丝绳7的预紧,打开下部机架16的电磁锁装置3,启动上部机架4的移动电机203,使上部机架4的移动平台201沿移动平台轨道207向外移动,通过连接杆8带动下部机架16的左半部和右半部向外移动;启动上部机架4的旋转电机204,使上部机架4的移动平台201旋转到合适的跨越角度;启动上部机架4的移动电机203,使上部机架4的移动平台201沿移动平台轨道207向内移动,下部机架16的电磁锁装置3闭合,启动下部机架16的调节张紧电机14,增大滚轮装置907与钢丝绳7的预紧,实现了下部机架16的开合线调节到合适跨越角度,完成上部机架4和下部机架16的位姿矫正;(4)障碍物越障:当机器人完成位姿矫正,或者预设最大跨越距离大于最宽跨越距离时,开始进行障碍物越障;启动上部机架4的调节张紧电机14,减小滚轮装置907与钢丝绳7的预紧,打开上部机架4的电磁锁装置3,启动下部机架16的移动电机203,使下部机架16的
移动平台201沿移动平台轨道207向外移动,通过六根连接杆8带动上部机架4的左半部和右半部向外移动;启动下部机架16的轮毂电机909,启动下部机架16攀爬钢丝绳7,使上部机架4跨越障碍物;当上部机架4跨越障碍物后,制停下部机架轮毂电机909,启动下部机架16的移动电机203,使下部机架16的移动平台201沿移动平台轨道207向内移动,上部机架4的电磁锁装置3闭合,启动上部机架4的调节张紧电机14正转,增大滚轮装置907与钢丝绳7的预紧;启动下部机架16的调节张紧电机14,减小滚轮装置907与钢丝绳7的预紧,打开下部机架16的电磁锁装置3,启动上部机架4的移动电机203,使上部机架4的移动平台201沿移动平台轨道207向外移动,通过六根连接杆8带动下部机架16的左半部和右半部向外移动,启动上部机架4的轮毂电机909,使下部机架16跨越障碍物;当下部机架16跨越障碍物后,制停上部机架4的轮毂电机909,启动上部机架4的移动电机203,使上部机架4的移动平台201沿移动平台轨道207向内移动,通过六根连接杆8带动下部机架16的左半部和右半部向内移动,闭合下部机架16的电磁锁装置3,启动下部机架16的调节张紧电机14,增大滚轮装置907与钢丝绳7的预紧,障碍物越障结束,探伤攀爬机器人继续正常爬行。
27.下面将结合本发明实施例中的附图,对本发明实施列中的技术方案进行清楚、完整地描述,显然,所描述的施列仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.如图1至图18所示,本发明所述一种越障式提升机钢丝绳检测机器人,包括上部机架4、下部机架16和连接杆8;上部机架4与下部机架16沿钢丝绳7轴向设置,且通过六根连接杆8连接固定;上部机架4与下部机架16结构相似,包括视觉模块1、越障装置2、电磁锁装置3、连接栓6、调节张紧装置9、张紧电机搭载平台11、电池搭载平台12、调节张紧齿轮13、调节张紧电机14和无线通讯搭载平台15,其中越障装置2、调节张紧装置9和电磁锁装置3沿钢丝绳7轴向依次设置,张紧电机搭载平台11、电池搭载平台12和无线通讯搭载平台15固定于上部机架4和下部机架16,调节张紧装置9通过调节张紧齿轮13和调节张紧电机14固定于张紧电机搭载平台11,调节张紧装置9沿径向夹持钢丝绳7;视觉模块1设置在上部机架4上表面和下部机架16下表面,用于检测行进方向是否有障碍物,通过图像边缘检测获得障碍物最窄跨越距离和最宽跨越距离。
29.所述包括上部机架4和下部机架16,上部机架4和下部机架16通过电磁锁装置3实现打开和闭合,上部机架4的左半部和右半部分别与刚丝绳磁化仪5套筒的左半部分和右半部分通过连接栓6连接固定,下部机架16的左半部和右半部分别与刚丝绳探伤仪10套筒的左半部分和右半部分通过连接栓6连接固定。
30.所述越障装置2包括移动平台201、中空旋转平台202、移动电机203、旋转电机204、旋转齿轮205、中空旋转平台轨道206、移动平台轨道207、轴承座208和滚珠丝杠装置209;中空旋转平台轨道206和旋转电机204固定于上部机架4和下部机架16的端盖,旋转电机204端部同轴设置有旋转齿轮205,中空旋转平台202和中空旋转平台轨道206同轴设置,中空旋转平台202设置在中空旋转平台轨道206上,旋转齿轮205与中空旋转平台202的内齿轮啮合,当旋转电机204驱动时,旋转齿轮205带动中空旋转平台202以钢丝绳7为轴线旋转,从而依据障碍物截面形状选择最优越障路径;移动电机203、移动平台轨道207、轴承座208固定在
中空旋转平台202上,移动平台201设置在移动平台轨道207上,移动平台201的外缘设置连接杆8,滚珠丝杠装置209与移动电机203和轴承座208同轴设置,滚珠丝杠装置209的另一端连接到移动平台201,当移动电机203驱动时,滚珠丝杠装置209带动移动平台201沿着移动平台轨道207做平移运动,从而实现平稳跨越障碍。
31.所述调节张紧装置9包括调节装置活塞腔901、齿条902、张紧弹簧903、张紧装置904、调节装置905、张紧装置活塞腔906、滚轮装置907、滚轮轴908和轮毂电机909;调节装置活塞腔901固定于上部机架4和下部机架16,活塞腔901、调节装置905、张紧装置活塞腔906、张紧弹簧903、张紧装置904依次同轴安装于调节装置活塞腔901,张紧装置904的顶端同轴安装有滚轮装置907、滚轮轴908和轮毂电机909,滚轮装置907采用高耐磨性树脂材料,轮毂电机909可以驱动滚轮轴908回转;调节装置905外侧设置有齿条902,齿条902与调节张紧齿轮13啮合传动,调节张紧齿轮13与调节张紧电机14同轴安装,调节张紧电机14通过调节张紧齿轮13和齿条902带动调节装置905往复运动,可以满足不同直径钢丝绳7的张紧,在张紧弹簧903弹性伸缩的作用下,滚轮轴908在压紧钢丝绳7的同时,具备一定的跨越断丝突起的能力。
实施例
32.以下将结合图6-图18详细地说明本发明的一个具体实施例;以罐道梁障碍物为例,罐道梁的最窄跨越距离小于预设最大跨越距离,左右半部开合线与罐道梁的相对位置如图6所示(左右半部开合线与罐道梁的相对位置可以是任意的),具体运动过程步骤如下:(1)当视觉模块1检测到爬行前方存在障碍物时,制停轮毂电机909,视觉检测障碍物最窄跨越距离和最宽跨越距离,由于预设最大跨越距离在最窄跨越距离和最宽跨越距离之间,判定为调节越障,运动状态如图 6。
33.(2)进一步下部机架16调节张紧电机14正转,增大预紧;接着上部机架4电磁锁装置3打开;最后下部机架16的移动电机203正转,使下部机架16的左(右)越障装置2相对于下部机架16向外移动,通过六根连接杆8带动上部机架4左(右)机架向外移动,运动状态如图7。
34.(3)进一步下部机架16的旋转电机204正转,使下部机架16的左(右)越障装置2旋转到合适的跨越角度,通过六根连接杆6带动上部机架4左(右)机架旋转到合适的跨越角度,运动状态如图8。
35.(4)进一步下部机架16的移动电机204反转,使下部机架16的左(右)越障装置2相对于下部机架16向内移动,通过六根连接杆8带动上部机架4左(右)机架向内移动;接着上部机架4电磁锁装置3闭合,上部机架4调节张紧电机14正转,增大预紧;实现了将上部机架4左右半部开合线调节合适跨越角度,运动状态如图9。
36.(5)进一步下部机架16的旋转电机204反转,使下部机架16的左(右) 越障装置2旋转到初始状态,运动状态如图10。
37.(6)进一步下部机架16调节张紧电机14反转,减小预紧;接着下部机架16电磁锁装置3打开;最后上部机架4的移动电机203正转,使上部机架4的左(右) 越障装置2相对于上部机架4向外移动,通过六根连接杆8带动下部机架16左(右)机架向外移动,运动状态如图11。
38.(7)进一步上部机架4的旋转电机204正转,使上部机架4的左(右)越障装置2旋转到合适的跨越角度,通过六根连接杆8带动下部机架16左(右)机架旋转到合适的跨越角度,运动状态如图12。
39.(8)进一步上部机架4的移动电机203反转,使上部机架4的左(右) 越障装置2相对于上部机架4向内移动,通过六根连接杆8带动下部机架16左(右)机架向内移动;接着下部机架16电磁锁装置3闭合,下部机架16调节张紧电机14正转,增大预紧;实现了将下部机架16左右半部开合线调节合适跨越角度,运动状态如图13。
40.(9)进一步上部机架4调节张紧电机14反转,减小预紧;接着上部机架4电磁锁装置3打开;接着下部机架16的移动电机203正转,使下部机架16的左(右) 越障装置2相对下部机架16向外移动,通过六根连接杆8带动上部机架4左(右)机架向外移动;最后通过下部机架16轮毂电机909驱动,使上部机架4跨越障碍物,运动状态如图14。
41.(10)进一步当上部机架4跨越障碍物后,制停下部机架16轮毂电机909;接着下部机架16的移动电机203反转,使下部机架16的左(右) 越障装置2相对于下部机架16向内移动,通过六根连接杆8带动上部机架4左(右)机架向内移动;最后上部机架4电磁锁装置3闭合,上部机架4调节张紧电机14正转,增大预紧,运动状态如图15。
42.(11)进一步下部机架16调节张紧电机14反转,减小预紧;接着下部机架16电磁锁装置3打开;接着上部机架4的移动电机203正转,使上部机架4的左(右) 越障装置2相对上部机架4向外移动,通过六根连接杆8带动下部机架16左(右)机架向外移动;最后通过上部机架4轮毂电机909驱动,使下部机架16跨越障碍物,运动状态如图16。
43.(12)进一步当下部机架16跨越障碍物后,制停上部机架4轮毂电机909;接着上部机架4的移动电机203反转,使上部机架4的左(右) 越障装置2相对于上部机架4向内移动,通过六根连接杆8带动下部机架16左(右)机架向内移动;最后下部机架16电磁锁装置3闭合,下部机架16调节张紧电机14正转,增大预紧;整个越障过程结束。运动状态如图17。
44.(13)当整个越障过程结束后,通过轮毂电机909继续正常爬行和检测。
45.向下越障过程与上述步骤相同。
46.上面所述仅是本发明专利的基本原理,并非对本发明专利作任何限制,凡是根据本发明专利对其进行同等变化和修饰,均在本专利技术保护方案的范畴之内。
47.本发明的越障式提升机钢丝绳检测机器人及越障方法,可使探伤攀爬机器人跨越罐道梁、钢梁等障碍物,有效解决存在障碍物的绳段难以检测的难题,有利于人全面、系统地检测整根钢丝绳;采用分体式布置,利用上部机架4和下部机架16交替夹持钢丝绳7,采用回转机构进行位姿矫正,通过轮毂电机驱动机体实现了高效可靠越障;张紧调节装置通过多轴同步向心夹持的方式,使攀爬机器人能够适应不同直径的钢丝绳7,使得机器人的通用性更强,利用张紧弹簧的柔性伸缩,可使机器人具备一定的钢丝绳7断丝突起越障能力;利用机器视觉判断前方是否有障碍物,判断是否可以跨越障碍物及通过障碍物截面形状选择最优跨越路径,自主旋转调节越障和直接越障的方式,有效帮助探伤攀爬机器人探测前方障碍物的情况从而做出决策;本发明的越障式提升机钢丝绳检测机器人及越障方法,滚轮装置907采用轮毂电机909,节约了攀爬机器人的内部空间,从而减小了整个机器人的体积,提高了狭窄井下空间机器人的爬行适应性。本发明的越障式提升机钢丝绳检测机器人及越障方法,基于弱磁原理检测,不仅可以对钢丝绳内部和外部的钢丝绳进行损伤检测,还可以
大大降低机器人的整体质量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1