基于蚁群优化的SCARA机器人实验装置与控制方法
基于蚁群优化的scara机器人实验装置与控制方法
技术领域
1.本发明涉及高速旋转scara机器人技术领域,具体为基于蚁群优化的scara机器人实验装置与控制方法。
背景技术:
2.scara机器人是一种圆柱坐标型的特殊类型的工业机器人,包含多个轴线相互平行的转动副和末端移动副,转动副负责进行平面定位和定向,移动副完成末端件垂直运动。scara机器人结构轻便合理,性价比高,响应速度是普通关节式机器人的数倍。scara机器人的特殊结构决定了它在工作面上具备极大的灵活性,在工作面的法线方向上具备极大的刚度。前者使得scara机器人几乎不存在运动死角,可以在受限的狭小空间内完成作业;后者使得scara机器人受重力等因素影响较小,运动稳定性较高。这些特性决定了scara机器人完美适配流水线如装配,搬运等工作场合,被广泛应用在工业生产生活中,如塑料工业、药品工业和食品工业等领域。为了提高工业生产力、节约能源,现代机械不断地向轻量化、低能耗和高效率等方向发展,高速高精度的360
°
旋转scara机器人开始得到许多研究者和工程师的关注。但受设计、加工和装配误差等因素的影响,旋转scara机器人在高速运动时,会在惯性力等因素的影响下出现构件弹性变形、碰撞等情况,这会影响到末端轨迹的定位精度。
3.为了保证scara机器人的定位精度和稳定性,需要检测出定位误差,而现有技术中的接触式传感器定位精度差且受运动影响会出现较大的测量噪声。另外,受间隙、磨损等不确定性因素干扰,理论机械臂运动模型与实际工况会出现较大的偏差。因此研究并设计一种定位精度高、稳定性强且可实时控制的高速高精度360
°
旋转的scara机器人具有重要的研究意义和实用价值。
技术实现要素:
4.本发明的目的在于提供基于蚁群优化的scara机器人实验装置与控制方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:基于蚁群优化的scara机器人实验装置,包括隔振台和轨迹控制单元,所述隔振台的顶部固定连接有底座,所述底座的顶部固定连接有驱动电机并且驱动电机转动连接机械臂i一端,所述机械臂i的另一端转动连接有机械臂ii的一端,所述机械臂ii和机械臂i连接端的顶部连接有电机,所述电机电性连接有电滑环,所述电滑环连接在铝型材支架的顶部中央,所述铝型材支架设在隔振台的四周;
6.所述机械臂ii的另一端安装有若干加速度传感器和反射器。
7.优选的,所述电机和驱动电机均连接有减速器,所述轨迹控制单元包括两组伺服驱动器、开关电源、控制卡以及pc,所述伺服驱动器分别电性连接电机、驱动电机和控制卡,所述控制卡电性连接伺服驱动器以及开关电源的同时与pc连接。
8.优选的,所述机械臂i远离底座的一端设有若干加速度传感器,所述隔振台的两侧
安装有激光探测头,所述激光探测头配合反射器组成两组激光跟踪仪,两个所述反射器并排安装在机械臂ii末端顶部。
9.优选的,所述加速度传感器共六个,其中四个分别平行安装在机械臂i和机械臂ii的末端两侧,其余两个安装在机械臂i和机械臂ii的末端径向外侧。
10.本发明还提供了基于蚁群优化的scara机器人实验装置的控制方法,包括如下步骤:
11.s1、以特定方法对预期轨迹进行离散化,将预期轨迹离散成点坐标序列以及对应的时间序列;
12.s2、根据所述点坐标序列、对应的时间序列和机械臂系统的运动学方程,建立基于运动学逆解的机械臂转角与末端位置的映射关系,求出理论上对应的机械臂角度序列、角速度速序列和角加速度序列;
13.s3、根据所述机械臂角度序列、角速度速序列和角加速度序列,输入伺服驱动器和控制卡,得到控制电机的电流时变信号和脉冲时变信号;
14.s4、根据所述输入电机的电流时变信号和脉冲时变信号,控制机械臂转动,经加速度传感器和激光跟踪仪得机器人实际位置坐标序列,加速度序列以及对应的时间序列并传输给pc;
15.s5、根据所述机器人实际位置坐标序列,加速度序列以及对应的时间序列,基于机械臂转角与末端位置的映射关系,求出实际的机械臂角度序列、角速度速序列和角加速度序列;
16.s6、根据所述实际角度序列、角速度速序列和角加速度序列以及理论角度序列、角速度速序列和角加速度序列,以轨迹跟踪误差为优化目标,设计一种基于蚁群优化和迭代学习的控制器,得到最优的角度补偿序列以及相应的速度、加速度补偿序列;
17.s7、根据所述的角度、速度和加速度补偿序列,输入控制卡和伺服驱动器,驱动电机按照预期速率完成预期轨迹。
18.与现有技术相比,本发明的有益效果是:本发明采用激光跟踪仪以及加速度传感器对机器人末端运动参数进行实时测量和传输,测量精度高,且属于非接触式测量,不增加结构附加质量,不改变结构特征,具有测量精度高、采样频率高、动态响应快的优点;控制该方法利用激光跟踪仪和加速度传感器采集机器人末端运动参数,实时传输给pc端,并采用基于蚁群优化和迭代学习的思想设计控制器,对轨迹误差进行补偿控制,使机器人末端以预期速率沿预期轨迹运动。
附图说明
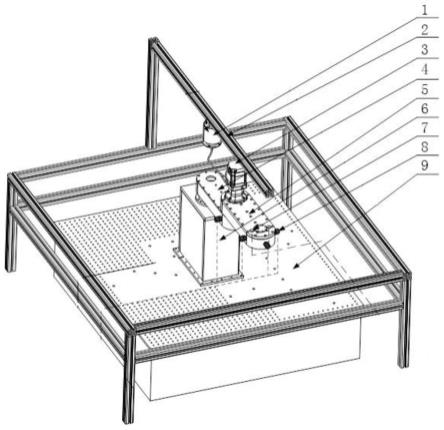
19.图1为本发明结构示意图;
20.图2为本发明俯视图;
21.图3为本发明正视图;
22.图4为本发明中蚁群优化控制器控制流程图;
23.图5为本发明中迭代学习流程图;
24.图6为本发明在预期轨迹为圆轨迹时每轮迭代的误差均值和方差结果;
25.图7为本发明在预期轨迹为圆轨迹时第1轮和第20轮各位置点误差结果;
26.图8为本发明中控制线路图。
27.图中:电滑环1、铝型材支架2、电机3、机械臂i4、机械臂ii5、底座6、反射器7、加速度传感器8、隔振台9。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.实施例1
30.参照图1-8,为本发明第一个实施例,该实施例提供了基于蚁群优化的scara机器人实验装置,包括隔振台9和轨迹控制单元,隔振台9呈方形,隔振台9的顶部使用螺栓固定连接有底座6,以螺栓连接的方式对机器人起到一个固定作用和支撑作用,同时有减震效果,以免对他人造成影响,底座6的顶部固定连接有驱动电机并且驱动电机转动连接机械臂i4一端,机械臂i4的另一端转动连接有机械臂ii5的一端,机械臂ii5和机械臂i4连接端的顶部连接有电机3,电机3电性连接有电滑环1,电滑环1连接在铝型材支架2的顶部中央,便于对旋转的电机3提供电力,铝型材支架2设在隔振台9的四周,铝型材支架2呈方形罩子形,起到保护作用,以免操作人员受伤;
31.机械臂ii5的另一端安装有若干加速度传感器8和反射器7,加速度传感器安装在机械臂的周围,通过线缆与pc连接,传输机械臂末端各向加速度。
32.电机3和驱动电机均连接有减速器,轨迹控制单元包括两组伺服驱动器、开关电源、控制卡以及pc,伺服驱动器分别电性连接电机3、驱动电机和控制卡,控制卡电性连接伺服驱动器以及开关电源的同时与pc连接,接收pc给出的信号处理后传输给伺服驱动器,伺服驱动器将信号处理之后传输给电机,驱动电机实现机械臂ii5末端以预期速率沿预期轨迹运动。本实施例中控制卡型号选用galil公司的dmc-4143-box型号;交流伺服系统驱选用安川的sgm7a-10afa61/sgd75-120a00a和sgm7a-08afa61/sgd75-5r5a00a;减速器分别选用sb90-30-p0-sgm7a-10afa61,其减速比为30,背隙《=5arcmin;fb90-30-sgm7a-08afa61,其减速比为30,背隙《=12arcmin。
33.机械臂i4远离底座6的一端设有若干加速度传感器8,隔振台9的两侧安装有激光探测头,激光探测头配合反射器7组成两组激光跟踪仪,两个反射器7并排安装在机械臂ii5末端顶部,通过线缆与pc连接,传输机械臂末端位置。激光探测头距离隔振台9边沿标准距离为200-500mm,探头高度距地面标准距离为900-1100mm,探头位置可水平垂直调整。
34.加速度传感器8共六个,其中四个分别平行安装在机械臂i4和机械臂ii5的末端两侧,其余两个安装在机械臂i4和机械臂ii5的末端径向外侧。
35.本发明还提供基于蚁群优化的scara机器人实验装置的控制方法,包括如下步骤:
36.s1、以特定方法对预期轨迹进行离散化,将预期轨迹离散成点坐标序列以及对应的时间序列;
37.s2、根据所述点坐标序列、对应的时间序列和机械臂系统的运动学方程,建立基于运动学逆解的机械臂转角与末端位置的映射关系,求出理论上对应的机械臂角度序列、角
的坐标相对于o1分别为(x3,y3,z3),(x4,y4,z4)。则有第一个反射器7坐标(x1,y1,z1):
52.(x
p1
,y
p1
,z
p1
)
t
=(d1sinβcosα,d1sinβsinα,d1cosβ)
t
53.(x1,y1,z1)
t
=r1(x
p1
,y
p1
,z
p1
)
t
+(x3,y3,z3)
t
54.其中r1为坐标系变换矩阵同理可得第二个反射器7坐标(x2,y2,z2)。考虑第一个和第二个反射器7并排置于机械臂ii5末端顶部,机械臂ii5末端的实际坐标(x,y,z)取(x1,y1,z1),(x2,y2,z2)平均值,若出现特定角度导致激光被铝型材支架2阻挡,导致一个激光跟踪仪没有读数,则以另一个计算得到的坐标作为实际坐标(x,y,z)。
55.加速度传感器8共六个,设第一加速度传感器8、第二加速度传感器8平行安装在机械臂i4末端两侧,第三加速度传感器8安装在机械臂i4末端径向外侧,第四加速度传感器8、第五加速度传感器8平行安装在机械臂i4末端两侧,第六加速度传感器8安装在机械臂ii5末端径向外侧,设第一加速度传感器8、第二加速度传感器8、第三加速度传感器8读数分别为(a
11
,a
12
,a
13
),则机械臂i4末端加速度同理可以得到机械臂ii5末端加速度a2。
56.在机械臂运转过程中,加加速度传感器8和激光跟踪仪实时的将机器人实际位置坐标序列,加速度序列以及对应的时间序列传输给pc。
57.具体的,实施例1的s5中,求出实际机械臂角度序列、角速度速序列和角加速度序列的方法是:
58.将理想轨迹离散点(xi,yi)换成实际坐标(xs,ys),同样利用无间隙理想运动学模型的反函数,求出实际角度序列(θ
1is
,θ
2is
)、角速度序列(v
1is
,v
2is
)和角加速度序列(a
1is
,a
2is
)。
59.另外的,鉴于间隙等干扰因素的影响,机械臂的实际运动范围可能超出理论可达位置,从而导致实际坐标(xs,ys)无法通过理论运动学逆解得到关节电机转角实数解。因此,可考虑对实际坐标(xs,ys)做边界缩小处理,即若存在其中l1,l2分别为机械臂i4、机械臂ii5的长度,则得到:
[0060][0061]
然后再利用无间隙理想运动学模型的反函数,求出实际角度序列(θ
1is
,θ
2is
)、角速度序列(v
1is
,v
2is
)和角加速度序列(a
1is
,a
2is
)。
[0062]
具体的,实施例1的s6中,控制器设计方法如下:
[0063]
定义误差e
1i
=[θ
1i-θ
1is
,v
1i-v
1is
,a
1i-a
1is
]
t
;e
2i
=[θ
2i-θ
2is
,v
2i-v
2is
,a
2i-a
2is
]
t
,其中位置,速度和加速度的误差权重分别为:λ1,λ2,λ3,蚁群控制器参数设置为(k
1i
,k
2i
)
t
,则可以得到控制器补偿后输入角度为(θ
1ix
,θ
2ix
):
[0064][0065]
即θ
ix
=θi+keiλ,同样地,将补偿后的控制后角度序列(θ
1ix
,θ
2ix
)、角速度速序列(v
1ix
,v
2ix
)和角加速度序列(a
1ix
,a
2ix
)输入控制卡和伺服驱动器,驱动电机按照预期速率完成预期轨迹。关于k阵参数的选取,通过蚁群优化和迭代学习的控制器进行筛选,具体流程如图4,图5所示。
[0066]
实施例3
[0067]
参照图1-8,为本发明第三个实施例,该实施例基于以上两个实施例,使用时,装置接通电源,驱动电机和电机3分别带动机械臂i4、机械臂ii5工作,控制方法为:以特定方法对预期轨迹进行离散化,将预期轨迹离散成点坐标序列以及对应的时间序列;根据所述点坐标序列、对应的时间序列和机械臂系统的运动学方程,建立基于运动学逆解的机械臂转角与末端位置的映射关系,求出理论上对应的机械臂角度序列、角速度速序列和角加速度序列;根据所述机械臂角度序列、角速度速序列和角加速度序列,输入伺服驱动器和控制卡,得到控制电机的电流时变信号和脉冲时变信号;根据所述输入电机的电流时变信号和脉冲时变信号,控制机械臂转动,经加速度传感器8和激光跟踪仪得机器人实际位置坐标序列,加速度序列以及对应的时间序列并传输给pc;根据所述机器人实际位置坐标序列,加速度序列以及对应的时间序列,基于机械臂转角与末端位置的映射关系,求出实际的机械臂角度序列、角速度速序列和角加速度序列;根据所述实际角度序列、角速度速序列和角加速度序列以及理论角度序列、角速度速序列和角加速度序列,以轨迹跟踪误差为优化目标,设计一种基于蚁群优化和迭代学习的控制器,得到最优的角度补偿序列以及相应的速度、加速度补偿序列;根据所述的角度、速度和加速度补偿序列,输入控制卡和伺服驱动器,驱动电机按照预期速率完成预期轨迹。
[0068]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1