一种具有高扭矩摆线减速机的机器人驱动关节模组
1.本发明涉及机器人领域,尤其涉及一种具有高扭矩摆线减速机的机器人驱动关节模组。
背景技术:
2.在现有的机器人关节模组研究上,机器人关节模组设计、驱动、能量消耗等等都是尚待完善的问题。以能量消耗为例,人类的能量消耗一般都是在0.01—0.2单位,而足式机器人的能量消耗都在2以上,像asimo和“big dog”分别是2单位和15单位,而机器人消耗大也就意味着相对机器人的续航时间的不够长。为了延长续航时间,提高电池容量、进行机构减重以及在驱动控制上做改善是三个主要的方法。
3.现有的机器人驱动关节很多都是采用电机与减速机分离式,没有集成在一起,导致关机驱动结构体积大,重量大,从而也无法解决能耗大的问题。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.鉴于上述现有技术的不足,本发明的目的在于提供一种具有高扭矩摆线减速机的机器人驱动关节模组,旨在解决现有机器人能耗大的问题。
6.本发明的技术方案如下:
7.一种具有高扭矩摆线减速机的机器人驱动关节模组,其中,其包括:
8.关节模组线缆;
9.编码器,所述编码器与所述关节模组线缆电性连接;
10.电机,所述电机与所述编码器连接,以实现所述编码器读取所述电机的实时位置信息;
11.高扭矩摆线减速机组件,所述高扭矩摆线减速机组件与所述电机连接,且内嵌于所述电机中;
12.针齿壳,所述针齿壳套设在所述编码器,所述电机和所述高扭矩摆线减速机组件上。
13.所述的具有高扭矩摆线减速机的机器人驱动关节模组,其中,所述电机包括:
14.电机后盖,所述电机后盖与所述针齿壳卡持,所述关节模组线缆一端连接所述编码器,另一端穿过所述电机后盖,与外界连接;
15.电机转子,所述电机转子一端与所述编码器连接,另一端与所述高扭矩摆线减速机组件连接;
16.电机定子,所述电机定子环绕所述电机转子外,且套设于所述针齿壳内。
17.所述的具有高扭矩摆线减速机的机器人驱动关节模组,其中,所述电机转子包括:
18.电机法兰,所述电机法兰上设有与所述编码器连接,一面面向所述电机后盖;
19.第一转子轴轴承,所述第一转子轴轴承一面朝向所述电机法兰的另一面;
20.电机转子轴,所述电机转子轴一面朝向所述第一转子轴轴承的另一面,以实现第一转子轴轴承对所述电机转子轴回转运动支承以及对所述电机转子轴的限位作用,所述电机转子轴同轴连接所述高扭矩摆线减速机组件,以实现所述电机转子轴的圆周运动作为所述高扭矩摆线减速机组件的输入运动传递到所述高扭矩摆线减速机组件中;
21.第二转子轴轴承,所述第二转子轴轴承一面朝向所述电机转子轴的另一面,以实现第二转子轴轴承对所述电机转子轴回转运动支承以及对所述电机转子轴的限位作用;
22.电机输出中心轴,所述电机输出中心轴依次套设于所述第一转子轴轴承,所述电机转子轴和所述第二转子轴轴承内。
23.所述的具有高扭矩摆线减速机的机器人驱动关节模组,其中,所述高扭矩摆线减速机组件包括:
24.摆线减速机组件输入轴,所述高扭矩摆线减速机组件输入轴与所述电机转子轴同轴连接,以实现通过所述电机转子轴传递到所述高扭矩摆线减速机组件的输入运动,再经所述高扭矩摆线减速机组件减速后得到输出运动;
25.十字滑块,所述十字滑块套设在所述高扭矩摆线减速机组件输入轴上,以实现增强传递扭矩。
26.所述的具有高扭矩摆线减速机的机器人驱动关节模组,其中,所述电机定子包括:
27.电机定子绕组,所述电机定子绕组环绕所述电机转子;
28.磁瓦,所述磁瓦套设在所述电机定子绕组外;
29.护磁圈,所述护磁圈套设在所述磁瓦外,所述护磁圈套设在所述针齿壳内;
30.电机永磁铁,所述电机永磁铁分布在所述护磁圈上,与所述电机定子绕组具有径向间隙,且连接在所述电机转子轴上。
31.所述的具有高扭矩摆线减速机的机器人驱动关节模组,其中,所述针齿壳包括:
32.定子绕组安装位,用于安装所述电机定子绕组。
33.所述的具有高扭矩摆线减速机的机器人驱动关节模组,其中,所述电机法兰包括:
34.编码器安装位,所述编码器安装在所述编码器安装位上;
35.电机后盖安装位,所述电机后盖与所述电机后盖卡持;
36.轴承安装位,所述轴承安装位用于安装所述第一转子轴轴承;
37.螺纹孔,所述螺纹孔用于连接外接设备。
38.所述的具有高扭矩摆线减速机的机器人驱动关节模组,还包括:
39.编码器磁铁,所述编码器磁铁位于所述编码器和所述电机法兰之间,用于吸住所述编码器和所述电机法兰,以实现所述编码器与所述电机法兰的连接。
40.所述的具有高扭矩摆线减速机的机器人驱动关节模组,还包括:
41.护线套,所述护线套与所述针齿壳连接,以实现对所述关节模组线缆的保护。
42.所述的具有高扭矩摆线减速机的机器人驱动关节模组,还包括:
43.制动抱闸,所述制动抱闸设置在所述电机转子与所述编码器之间,以实现控制电机转动。
44.有益效果:本发明公开一种具有高扭矩摆线减速机的机器人驱动关节模组,其包括关节模组线缆,与所述关节模组线缆电性连接的编码器,与所述编码器连接的电机,以实现所述编码器读取所述电机的实时位置信息,与所述电机连接的摆线减速机组件,所述高
扭矩摆线减速机组件内嵌于所述电机中,套设在所述编码器,所述电机和所述高扭矩摆线减速机组件上的所述针齿壳。通过内嵌入所述高扭矩摆线减速机组件,并配置合适的编码器等电气元器件,组成紧凑的功率密度大的机器人驱动关节模组,可以实现减小机器人的整体重量,从而达到提高机器人续航能力的效果。
附图说明
45.图1为本发明提供的具有高扭矩摆线减速机的机器人驱动关节模组立体图。
46.图2为本发明提供的具有高扭矩摆线减速机的机器人驱动关节模组的剖视图。
47.图3为本发明提供的具有高扭矩摆线减速机的机器人驱动关节模组的针齿壳剖视图。
48.图4为本发明提供的具有高扭矩摆线减速机的机器人驱动关节模组的电机法兰剖视图。
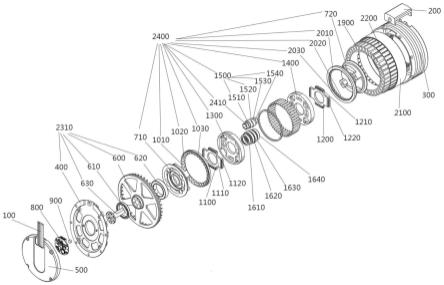
49.图5为本发明提供的具有高扭矩摆线减速机的机器人驱动关节模组的爆炸图。
50.图6为本发明提供的具有高扭矩摆线减速机的机器人驱动关节模组的电机爆炸图。
具体实施方式
51.本发明提供一种具有高扭矩摆线减速机的机器人驱动关节模组,为使本发明的目的、技术方案及效果更加清楚、明确,以下对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
52.本发明提供一种具有高扭矩摆线减速机的机器人驱动关节模组,如图1,图2和图5所示,其中所述具有高扭矩摆线减速机的机器人驱动关节模组包括了关节模组线缆100,编码器800,电机2300,摆线减速机组件2400和针齿壳300。本发明将所述高扭矩摆线减速机组件2400内嵌到电机内部,并配置合适的编码器800等电气元器件,如此可以组成紧凑的功率密度大的机器人驱动关节模组,从而减小机器人的整体重量,达到提高机器人续航能力的效果。
53.如图5和图6所示,所述电机与所述编码器800连接,所述编码器800与所述关节模组线缆100可以通过电性连接,如此可以实现所述编码器800读取所述电机的实时位置信息,从而所述关节模组可以实现伺服控制。所述电机2300包括电机后盖500,电机转子2310和电机定子2320。其中,所述电机后盖500与所述针齿壳300连接,例如通过螺纹紧固件连接,所述关节模组线缆100一端连接所述编码器800,另一端穿过所述电机后盖500后,可以与外界连接,可以实现与其他部件的连接,扩大使用范围和使用场景。
54.其中,所述电机2300包括了电机后盖500,电机转子2310和电机定子2320。其中,所述电机后盖与所述针齿壳300卡持,所述关节模组线缆100一端连接所述编码器800,另一端穿过所述电机后盖500,与外界连接,所述电机转子2310一端与所述编码器800连接,另一端与所述高扭矩摆线减速机组件2400连接,所述电机定子2320环绕所述电机转子2310外,且套设于所述针齿壳300内。本发明采用外转子电机,如此可以减小所述电机2300的体积。
55.所述电子转子包括电机法兰400,电机输出中心轴630,第一转子轴轴承610,电机转子轴600和第二转子轴轴承620。
56.如图4和图5所示,所述电机法兰400具有电机后盖安装位430,编码器安装位410,轴承安装位420和螺纹孔440。所述电机法兰400一面面向所述电机后盖500,所述电机法兰400上具有电机后盖安装位430,所述电机后盖500与所述电机后盖安装位430连接,因此可以防止灰尘等异物进入所述装置内部。在所述电机后盖500和所述电机法兰400之间可以设有编码器800和编码器磁铁900,其中所述电机法兰400与通过编码器磁铁900与所述编码器800连接。具体的,所述电机法兰400具有编码器安装位410,所述编码器800通过所述编码器磁铁900安装在所述编码器安装位410上,所述编码器磁铁900用于吸住所述编码器800和所述电机法兰400,可以实现所述编码器800与所述电机法兰400的连接。所述电机法兰400还设有轴承安装位420,所述轴承安装位420用于安装所述第一转子轴轴承610。此外所述电机法兰400还设有螺纹孔440,所述螺纹孔用于连接外接设备,所述螺纹孔440可以均匀分布在所述电机法兰400的三圈上,并且可以设置为轴向螺纹孔。
57.所述电机转子2310还包括电机输出中心轴630,所述电机输出中心轴630依次套设于所述第一转子轴轴承610,所述电机转子轴600和所述第二转子轴轴承620内。其中,所述第一转子轴轴承610一面朝向所述电机法兰400的另一面,所述电机转子轴600一面朝向所述第一转子轴轴承610的另一面,可以实现第一转子轴轴承610对所述电机转子轴600回转运动支承以及对所述电机转子轴600的限位作用。此外,所述电机转子轴600同轴连接所述高扭矩摆线减速机组件2400,可以实现所述电机转子轴600的圆周运动作为所述高扭矩摆线减速机组件2400的输入运动传递到所述高扭矩摆线减速机组件2400中,所述编码器800如此能读取所述电机转子轴600的实时位置信息,从而整个关节模组可以实现伺服控制。所述第二转子轴轴承620一面朝向所述电机转子轴600的另一面,可以实现第二转子轴轴承620对所述电机转子轴600回转运动支承以及对所述电机转子轴600的限位作用。
58.如图6所示,所述电机2300还包括电机定子2320,所述电机定子2320环绕所述电机转子2310,并且套设于所述针齿壳300内。所述电机定子2320还包括电机定子绕组1900,磁瓦2200,护磁圈2100和电机永磁铁2110,所述电机定子绕组1900环绕所述电机转子2310,所述磁瓦2200套设在所述电机定子绕组1900外,所述护磁圈2100套设在所述磁瓦2200外,并且所述护磁圈2100套设在所述针齿壳300内,所述电机永磁铁2110分布在所述护磁圈2100上,与所述电机定子绕组1900具有径向间隙,并且连接在所述电机转子轴600上,其中,所述电机永磁铁2110通过粘胶等方式均布粘贴在所述护磁圈2100上,并与所述电机定子绕组1900保持一定的径向间隙,所述护磁圈2100通过过盈配合、粘胶等方式固定连接到所述电机转子轴600上,如此所述电机通电时电机转子轴600在所述电机转子2310和所述电机定子2320作用下就会转动,采用外转子电机是为了更方便嵌入所述所述高扭矩摆线减速机组件2400,缩小其整个装置的体积。
59.如图5和图6所示,所述高扭矩摆线减速机组件2400与所述电机2300连接,并且内嵌于所述电机2300中,本发明提供的内嵌摆线减速机组件组件的关节模组,结构简单且体积小,重量轻,可以降低机器人能耗,从而实现提高机器人续航能力的效果。具体的,所述高扭矩摆线减速机组件2400包括第一主轴承外滚道1010,第一主轴承滚子保持架1030,第一主轴承滚子1020和第一输出法兰710,第一摆线轮1300,所述高扭矩摆线减速机组件输入轴2410,所述高扭矩摆线减速机组件输入轴轴承1500,第二摆线轮1400,第二主轴承外滚道2010,第二主轴承滚子保持架2030,第二主轴承滚子2020和第二输出法兰720。
60.所述第一主轴承外滚道1010卡持在所述针齿壳300连接,所述第一主轴承滚子保持架1030卡持在所述第一主轴承外滚道1010上,并且所述第一主轴承外滚道1010上设置有第一滚子孔,所述第一主轴承滚子1020放置在所述第一滚子孔中,并且两者相适配放置。所述第一输出法兰710与所述针齿壳300相连接,所述第一输出法兰710上设有第一主轴承内滚道,所述第一主轴承内滚道与所述第一主轴承外滚道1010相适配,如此可以实现所述第一主轴承滚子1020在所述第一主轴承内滚道和所述第一主轴承外滚道1010内滚动。通过所述第一主轴承可以提高了摆线减速机组件的承载能力,如此可以实现所述高扭矩摆线机组件体积小,方便内嵌入所述电机2300中。
61.与此对应的,所述第二主轴承外滚道2010卡持在所述针齿壳300上,所述第二主轴承滚子保持架2030卡持在所述第二主轴承外滚道2010上,并且所述第二主轴承外滚道2010上设置有第二滚子孔,所述第二主轴承滚子2020放置在所述第二滚子孔上,并且两者相适配放置,所述第二输出法兰720与所述针齿壳300相卡持,其中所述第二输出法兰720上设有第二主轴承内滚道,与所述第二主轴承外滚道2010相适配,可以实现所述第二主轴承滚子2020在所述第二主轴承内滚道和所述第二主轴承外滚道2010内滚动。通过所述第一主轴承滚子1020可以提高了所述高扭矩摆线减速机组件2400的承载能力。所述针齿壳300同时承受径向力和轴向力,因此大大提高了摆线减速机的承载能力。其中,第一输出法兰710和第二输出法兰720通过螺纹紧固件连接在一起成为摆线减速机组件的输出法兰。
62.其中所述高扭矩摆线减速机组件输入轴轴承1500和所述高扭矩摆线减速机组件输入轴2410依次套设于所述第一摆线轮1300,第二摆线轮1400。其中所述第一摆线轮1300和第二摆线轮1400为摆线轮,其中所述高扭矩摆线减速机组件输入轴2410与所述电机转子轴600同轴连接,可以以实现通过所述电机转子轴600传递到所述高扭矩摆线减速机组件2400的输入运动,再经所述高扭矩摆线减速机组件2400减速后得到输出运动。所述输入轴轴承依次套设于所述第一输出法兰710,所述第一摆线轮1300,所述第二摆线轮1400,以及所述第二输出法兰720内,其中连接可以通过过盈配合、粘胶、键、螺纹紧固等方式。所述输入轴轴承包括第一输入轴轴承1510,第二输入轴轴承1520,第三输入轴轴承1530和第四输入轴轴承1540,所述第一输入轴轴承1510与所述第一输出法兰710卡持连接,可以实现对所述第一输出法兰710支撑和限位作用,尤其为圆周支撑。所述第二输入轴轴承1520与所述第一摆线轮1300卡持连接,可以实现对所述第一摆线轮1300卡持支撑和限位作用,尤其为圆周支撑。第三输入轴轴承1530与所述第二摆线轮1400卡持连接,可以实现对所述第二摆线轮1400卡持支撑和限位作用,尤其为圆周支撑。第四输入轴轴承1540与所述第二输出法兰720卡持连接,可以实现对所述第二输出法兰720支撑和限位作用,尤其为圆周支撑。所述输入轴套设于所述输入轴轴承内,所述输入轴上设有第一轴承外圈1610,第二轴承外圈1620,第三轴承外圈1630和第四轴承外圈1640,所述第一轴承外圈1610用于外套设安装所述第一输入轴轴承1510,所述第二轴承外圈1620用于外套设安装所述第二输入轴轴承1520,所述第三轴承外圈1630用于外套设安装所述第三输入轴轴承1530,所述第四轴承外圈1640用于外套设安装所述第四输入轴轴承1540。
63.其中,所述用于机器人的摆线减速机组件包括第一滑块1100和第二滑块1200,所述第一滑块1100设于所述第一输出法兰710与所述第一摆线轮1300之间,可以实现所述第一滑块1100对所述所述第一输出法兰710与所述第一摆线轮1300限位作用,所述第二滑块
1200设于所述第二输出法兰720与所述第二摆线轮1400之间,可以实现所述第二滑块1200对所述所述第二输出法兰720与所述第二摆线轮1400限位作用。
64.所述用于机器人的摆线减速机组件还包括第一滑块第一滚子1110和第一滑块第二滚子1120,其中所述第一滑块第一滚子1110位于第一滑块1100两侧,与所述第一滑块1100和所述第一输出法兰710啮合,第一滑块第二滚子1120位于所述第一滑块1100另外两侧,与所述第一滑块1100和所述第一摆线轮1300啮合,第二滑块第一滚子1210,所述第二滑块1200两侧,与所述第二滑块1200和所述第二输出法兰720啮合,第二滑块1200第二滚。所述第一滑块1100和所述第二滑块1200都为十字滑块。采用所述十字滑块可以提取摆线轮减速后的自转运动。所述十字滑块可以设置在所述输入法兰和所述摆线轮中间,且套设在所述高扭矩摆线减速机组件输入轴,以实现增强传递扭矩。如此所述十字滑块,主轴承滚子以及摆线轮之间相互作用可以大大增大了整个摆线减速机的传递扭矩。第一滑块1100和第二滑块1200的作用是把第一摆线轮1300和第二摆线轮1400经过减速后的运动和扭矩提取到所述第一输出法兰710和第二输出法兰720上,由于第一滑块第一滚子1110,第一滑块第二滚子1120,第二滑块第一滚子1210,第二滑块第二滚子1220,第一输出法兰710,第二输出法兰720,第一摆线轮1300和第二摆线轮1400的共同作用,形成滚子轴承结构因而大大增大了整个摆线减速机组件的传递扭矩,能够使整个装置的承载能力大大提高。
65.如图3至图5所示,所述针齿壳300套设在所述编码器800,所述电机2300和所述高扭矩摆线减速机组件2400上。所述针齿壳300一端通过螺纹紧固件连接所述电机法兰400,中间两端设计有两个轴承安装位320,用于连接所述高扭矩摆线减速机组件2400的所述第一输出法兰710和所述第二输出法兰720,两个轴承安装位320之间设计有一圈均布的针齿销位330,所述针齿壳300内部设计有定子绕组安装位310,所述定子绕组安装位310用于安装所述电机定子绕组1900,所述电机定子绕组1900通过过盈配合、粘胶等方式固定安装到所述针齿壳300的定子绕组安装位310上。此外所述针齿壳300一端设计有一圈均布的轴向螺纹孔350,另一端设计有一圈均布的径向螺纹孔340,可以用于连接外界设备。
66.此外所述具有高扭矩摆线减速机的机器人驱动关节模组还包括所述护线套200,所述护线套200一端与所述针齿壳300连接,例如螺纹紧固件连接,所述护线套200另一端嵌入所述电机后盖500内,所述护线套200可以实现对所述关节模组线缆100的保护。
67.综上所述,本发明提供的具有高扭矩摆线减速机的机器人驱动关节模组,通过内嵌入所述高扭矩摆线减速机组件,并配置合适的编码器等电气元器件,组成紧凑的功率密度大的机器人驱动关节模组,可以实现减小机器人的整体重量,达到提高机器人续航能力的效果。
68.应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1