一种具有抗噪特性的轮式移动机械臂重复运动规划方法
1.本发明涉及移动机械臂的运动规划及控制领域,尤其是涉及一种具有抗噪特性的轮式移动机械臂重复运动规划方法。
背景技术:
2.轮式移动机械臂(由双轮驱动的移动平台和n自由度的机械臂组成)因其可移动性和可操作性而具有非常大且灵活的工作空间,已广泛应用于物流、汽车、食品和医药等诸多行业,在这些应用中,轮式移动机械臂运动规划的重复性是用来评估给定任务执行效果的一个重要指标。
3.如何有效实现轮式移动机械臂的重复运动规划是研究热点之一,目前已有多种重复运动规划方案被提出,其中包括基于伪逆和二次规划描述的方案;它们可使得移动平台和机械臂在任务完成后同时回到各自的初始状态。
4.然而,这些方案都是在不考虑噪声干扰情况下进行研究和设计的,因而本质上缺乏抗噪能力,如果遇到外界环境噪声的干扰,那么这些方案将会失效,从而无法使得轮式移动机械臂完成给定的轨迹规划任务,页无法实现重复运动规划的目标。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种具有抗噪特性的轮式移动机械臂重复运动规划方法。
6.本发明的目的可以通过以下技术方案来实现:
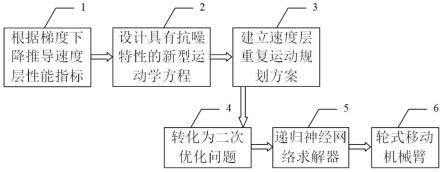
7.一种具有抗噪特性的轮式移动机械臂重复运动规划方法,该方法包括以下步骤:
8.步骤1:根据负梯度下降公式推导轮式移动机械臂在速度层上描述的性能指标;
9.步骤2:基于误差反馈设计具有抗噪特性的新型运动学方程;
10.步骤3:结合性能指标和新型运动学方程建立速度层重复运动规划方案;
11.步骤4:将速度层重复运动规划方案转化为二次优化问题;
12.步骤5:采用递归神经网络求解二次优化问题;
13.步骤6:轮式移动机械臂的控制器根据求结果实时完成轨迹规划任务,并在任务完成后复位。
14.所述的步骤1中,推导轮式移动机械臂在速度层上描述的性能指标的过程具体为:
15.基于轮式移动机械臂当前状态与初始状态之间偏差的最小化思想,根据负梯度下降公式推导在速度层上描述的性能指标,所述的轮式移动机械臂包括双轮驱动的移动平台和安装固定在移动平台上且具有n自由度的机械臂,所述的性能指标的表达式为:
[0016][0017]
其中,ψ为性能指标,||
·
||2表示向量的二范数,表示轮式移动机械臂的增广位置向量,n为自由度个数,p
x
∈r和py∈r分别表示移动平台在水
平地面上沿着x轴和y轴方向的位置,即机械臂的底座安装固定在移动平台上的位置,φ∈r表示移动平台的朝向角,θ∈rn表示机械臂的关节角度,表示轮式移动机械臂的增广速度向量,和分别表示p
x
、py和φ的时间导数,表示机械臂的关节速度,v=[p
x-p
x0
;p
y-p
y0
;cos(φ)(sin(φ)-sin(φ0));θ-θ0],v∈r
3+n
为偏差向量,p
x0
∈r、p
y0
∈r和φ0∈r分别表示移动平台在x轴的初始位置、y轴方向的初始位置以及初始朝向角,θ0∈rn表示机械臂关节角度的初始值,p
x0
、p
y0
、φ0和θ0组成联合向量表示轮式移动机械臂的初始状态,即轮式移动机械臂执行轨迹规划任务时的起始状态,λ>0∈r为设计参数,用以调节性能指标,使得轮式移动机械臂实现重复运动规划的目标。
[0018]
所述的步骤2中,设计具有抗噪特性的新型运动学方程的过程具体为:
[0019]
根据轮式移动机械臂的速度层运动学方程,引入末端执行器规划误差及其积分信息的反馈,获取具有抗噪特性的新型运动学方程,具有抗噪特性的新型运动学方程的表达式为:
[0020][0021]
其中,j∈rm×
(3+n)
表示轮式移动机械臂的雅克比矩阵,f(
·
):r
3+n
→rm
表示非线性映射函数,r∈rm表示机械臂末端执行器在m维空间中的位置向量,表示r的时间导数,α>0∈r和β>0∈r均表示反馈系数,且两者的关系满足α2>β,t>0∈r表示时间,表示机械臂末端执行器的规划误差,τ∈r表示积分变量,δ∈rm表示轮式移动机械臂在运动规划过程中可能存在的噪声向量。
[0022]
所述的步骤3中,所述的速度层重复运动规划方案具体为:
[0023]
最小化性能指标
[0024]
受到新型运动学方程、移动平台双驱动轮的旋转角度极限和旋转角速度极限、机械臂关节的角度极限和速度极限的约束,新型运动学方程对应于轮式移动机械臂在速度层上的轨迹规划任务;
[0025]
所述的新型运动学方程、移动平台双驱动轮的旋转角度极限和旋转角速度极限、机械臂关节的角度极限和速度极限的表达式分别为:
[0026][0027]
ω-≤ω≤ω
+
[0028][0029]
θ-≤θ≤θ
+
[0030][0031]
其中,ω∈r2和分别表示移动平台两个驱动轮的旋转角度和旋转角速度,ω
±
、θ
±
和分别表示驱动轮旋转角度ω、驱动轮旋转角速度机械臂关节角度θ和机械臂关节速度的上下极限。
[0032]
所述的步骤4中,将速度层重复运动规划方案转化的二次优化问题具体为:
[0033]
最小化x
t
qx/2+p
t
x;
[0034]
受约束于两个约束条件,分别为第一约束条件和第二约束条件,第一约束条件和第二约束条件的表达式分别为:
[0035]
ax=b
[0036]
ξ-≤x≤ξ
+
[0037]
其中,表示二次优化问题的决策变量,u=[ω;θ],u∈r
2+n
和分别为轮式移动机械臂的联合角度向量和联合速度向量,q=w
t
w,q∈r
(2+n)
×
(2+n)
表示系数矩阵,t表示转置,w=[m,0;0,i],w∈r
(3+n)
×
(2+n)
表示增广矩阵,m=[γcos(φ)/2,γcos(φ)/2;γsin(φ)/2,γsin(φ)/2;-γ/d,γ/d],m∈r3×2表示由移动平台自身结构参数所组成的矩阵,γ>0∈r表示移动平台驱动轮的半径,d>0∈r表示移动平台两个驱动轮中心点的距离,i∈rn×n表示单位矩阵,p=λw
t
v∈r
2+n
表示系数向量,a=jw∈rm×
(2+n)
和均为约束参数,表示决策变量x的上极限,表示决策变量x的下极限,η>0∈r表示处理极限的转换参数,u
±
=[ω
±
;θ
±
]和分别表示联合角度向量u和联合速度向量的上下极限。
[0038]
所述的步骤4中,采用递归神经网络求解二次优化问题的过程具体为:
[0039]
将二次优化问题进一步转化为分段线性投影方程,二次优化问题的求解等价为分段线性投影方程的求解,采用对应的递归神经网络对分段线性投影方程进行求解;
[0040]
给定一个初始值,通过递归神经网络的不断演化计算得到分段线性投影方程的数值解,从而能够得到二次优化问题的最优解,即轮式移动机械臂的速度层重复运动规划方案的最优解,轮式移动机械臂的控制器根据最优解实时地驱动移动平台的双轮和机械臂的关节来完成设定的轨迹规划任务;
[0041]
所述的分段线性投影方程的表达式为:
[0042]
p
ω
(y-(uy+q))-y=0∈r
2+n+m
[0043]
其中,p
ω
(
·
)表示分段线性投影算子,y=[x;z]∈r
2+n+m
表示分段线性投影方程的决策变量,z∈rm表示二次优化问题中第一约束条件的对偶变量,u=[q,a
t
;a,0]∈r
(2+n+m)
×
(2+n+m)
表示增广矩阵,q=[p;-b]∈r
(2+n+m)
表示增广向量;
[0044]
所述的递归神经网络的表达式为:
[0045][0046]
其中,表示分段线性投影方程的决策变量y的时间导数,in∈r
(2+n+m)
×
(2+n+m)
表示单位矩阵,ρ>0∈r表示设计参数,用以调节递归神经网络的计算性能。
[0047]
与现有技术相比,本发明具有以如下有益效果:
[0048]
本发明通过在轮式移动机械臂的速度层运动学方程中引入末端执行器规划误差及其积分信息的反馈,设计具有抗噪特性的新型运动学方程,进而建立基于梯度下降和误差反馈设计的速度层重复运动规划方案,将速度层重复运动规划方案转化为二次优化问
题,采用递归神经网络求解二次优化问题,即得到轮式移动机械臂的速度层重复运动规划方案的最优解,使得轮式移动机械臂在存在噪声干扰的情况下仍能有效地完成给定的任务,且在任务完成后移动平台和机械臂同时回到它们的初始状态,实现重复运动规划的目的。
附图说明
[0049]
图1为本发明的方法流程图。
具体实施方式
[0050]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0051]
如图1所示,本发明提供了一种具有抗噪特性的轮式移动机械臂重复运动规划方法,该方法包括以下步骤:
[0052]
步骤1:基于轮式移动机械臂当前状态与初始状态之间偏差的最小化思想,根据负梯度下降公式推导一个在速度层上描述的性能指标;
[0053]
步骤2:在轮式移动机械臂的速度层运动学方程中引入末端执行器规划误差及其积分信息的反馈,设计具有抗噪特性的新型运动学方程;
[0054]
步骤3:结合性能指标和运动学方程建立速度层重复运动规划方案,速度层重复运动规划方案受到新型运动学方程、移动平台双驱动轮的旋转角度极限和旋转角速度极限、机械臂关节的角度极限和速度极限的约束;
[0055]
步骤4:将速度层重复运动规划方案转化为一个二次优化问题;
[0056]
步骤5:采用递归神经网络求解二次优化问题;
[0057]
步骤6:轮式移动机械臂的控制器根据求解结果实时驱动移动平台的双轮和机械臂的关节完成给定的轨迹规划任务,并在任务完成后控制移动平台和机械臂同时回到初始状态。
[0058]
轮式移动机械臂包括一个双轮驱动的移动平台和一个安装固定在移动平台上且具有n自由度的机械臂,性能指标的表达式为:
[0059][0060]
其中,ψ为性能指标,||
·
||2表示向量的二范数,表示轮式移动机械臂的增广速度向量,表示轮式移动机械臂的增广位置向量,p
x
∈r和py∈r分别表示移动平台在水平地面上沿着x轴和y轴方向的位置(同时也是机械臂的底座安装固定在移动平台上的位置),φ∈r表示移动平台的朝向角,和分别表示p
x
、py和φ的时间导数,θ∈rn表示机械臂的关节角度,表示机械臂的关节速度,设计参数λ>0∈r用以调节性能指标,使得轮式移动机械臂实现重复运动规划的目标,v=[p
x-p
x0
;p
y-p
y0
;cos(φ)(sin(φ)-sin(φ0));θ-θ0]∈r
3+n
为偏差向量,p
x0
∈r、p
y0
∈r和φ0∈r分别表示移动平台在x轴的初始位置、y轴方向的初始位置以及初始朝
向角,θ0∈rn表示机械臂关节角度的初始值,p
x0
、p
y0
、φ0和θ0组成联合向量表示轮式移动机械臂的初始状态,即执行轨迹规划任务时的起始状态。
[0061]
具有抗噪特性的新型运动学方程的表达式为:
[0062][0063]
其中,j∈rm×
(3+n)
表示轮式移动机械臂的雅克比矩阵,f(
·
):r
3+n
→rm
表示一个非线性映射函数,r∈rm表示机械臂末端执行器在m维空间中的位置向量,表示r的时间导数,α>0∈r和β>0∈r均表示反馈系数,且两者的关系满足α2>β,t>0∈r表示时间,表示机械臂末端执行器的规划误差,τ∈r表示积分变量,δ∈rm表示轮式移动机械臂在运动规划过程中可能存在的噪声向量。
[0064]
速度层的重复运动规划方案具体为:
[0065]
最小化性能指标
[0066]
受到新型运动学方程、移动平台双驱动轮的旋转角度极限和旋转角速度极限、机械臂关节的角度极限和速度极限的约束,新型运动学方程、移动平台双驱动轮的旋转角度极限和旋转角速度极限、机械臂关节的角度极限和速度极限的表达式分别为:
[0067][0068]
ω-≤ω≤ω
+
[0069][0070]
θ-≤θ≤θ
+
[0071][0072]
其中,新型运动学方程对应于轮式移动机械臂在速度层上的轨迹规划任务,ω∈r2和分别表示移动平台两个驱动轮的旋转角度和旋转角速度,ω
±
、θ
±
和分别表示驱动轮旋转角度ω、驱动轮旋转角速度机械臂关节角度θ和机械臂关节速度的上下极限;
[0073]
在此基础上,进一步定义轮式移动机械臂的联合角度向量和联合速度向量为u=[ω;θ]∈r
2+n
和其中,u
±
=[ω
±
;θ
±
]和分别表示u和的上下极限。
[0074]
将速度层重复运动规划方案转化的二次优化问题具体为:
[0075]
最小化x
t
qx/2+p
t
x,受约束于两个约束条件,分别为第一约束条件和第二约束条件,第一约束条件和第二约束条件的表达式分别为:
[0076]
ax=b
[0077]
ξ-≤x≤ξ
+
[0078]
其中,表示二次优化问题的决策变量,q=w
t
w∈r
(2+n)
×
(2+n)
表示系数矩阵,t表示矩阵或向量的转置,w=[m,0;0,i]∈r
(3+n)
×
(2+n)
表示增广矩阵,m=[γcos(φ)/
2,γcos(φ)/2;γsin(φ)/2,γsin(φ)/2;-γ/d,γ/d],m∈r3×2表示由移动平台自身结构参数所组成的矩阵,γ>0∈r表示移动平台驱动轮的半径,d>0∈r表示移动平台两个驱动轮中心点的距离,i∈rn×n表示单位矩阵,p=λw
t
v∈r
2+n
表示系数向量,a=jw∈rm×
(2+n)
和为约束参数,ξ
±
表示决策变量x的上下极限,且η>0∈r表示处理极限的转换参数。
[0079]
采用递归神经网络求解二次优化问题的过程具体为:
[0080]
将二次优化问题进一步转化为分段线性投影方程,并采用相应的递归神经网络进行求解,轮式移动机械臂的控制器根据求解结果实时地驱动移动平台的双轮和机械臂的关节来完成给定的轨迹规划任务。
[0081]
分段线性投影方程的表达式为:
[0082]
p
ω
(y-(uy+q))-y=0∈r
2+n+m
[0083]
其中,p
ω
(
·
)表示分段线性投影算子,y=[x;z]∈r
2+n+m
表示分段线性投影方程的决策变量,z∈rm表示二次优化问题中第一约束条件的对偶变量,u=[q,a
t
;a,0]∈r
(2+n+m)
×
(2+n+m)
表示增广矩阵,q=[p;-b]∈r
(2+n+m)
表示增广向量,因此,二次优化问题的求解等价为分段线性投影方程的求解。
[0084]
对于分段线性投影方程采用递归神经网络进行求解,递归神经网络的表达式为:
[0085][0086]
其中,表示分段线性投影方程的决策变量y的时间导数,in∈r
(2+n+m)
×
(2+n+m)
表示单位矩阵,ρ>0∈r表示设计参数,用以调节神经网络的计算性能,给定一个初始值,通过递归神经网络的不断演化计算,得到分段线性投影方程的数值解,从而能够得到二次优化问题的最优解,即轮式移动机械臂的速度层重复运动规划方案的最优解。
[0087]
轮式移动机械臂的控制器根据求解结果实时地驱动移动平台的双轮和机械臂的关节完成给定的轨迹规划任务,并且,移动平台和机械臂在任务完成后可同时回到它们的初始状态,从而实现了重复运动规划的目的。
[0088]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1