关节模组的驱动总成、机器人关节模组及机器人的制作方法
1.本技术涉及机器人技术领域,特别涉及一种关节模组的驱动总成、机器人关节模组及机器人。
背景技术:
2.现阶段,随着机器人技术的日趋进步和完善,协作机器人作为一种与传统工业机器人在设计及应用理念上完全不同的机器人类型,凭借其所具备的人机安全性,广泛应用于汽车零部件、金属加工以及医疗器械、消费餐饮、科研教育等诸多领域,提高了劳动作业效率,改善了消费生活模式。
3.在关节模组的整机结构设计上,首先应严格保证关节轴系零部件配置的可靠性以及输出端的承载能力和支撑刚性。在关节模组运动时,通常会产生沿轴向作动的轴向力,而轴承通常通过冷挤压安装在轴上,振动工况下,轴承的轴向位置不稳定,在轴向力作用下发生位移或松动时容易影响输入轴的效率,从而影响关节模组的性能和可靠性。
技术实现要素:
4.本技术提供一种关节模组的驱动总成、机器人关节模组及机器人。
5.第一方面,本技术提供一种关节模组的驱动总成,包括固定壳、输入轴、第一轴承以及限位套。固定壳具有相对的第一端和第二端,输入轴沿第一端至第二端的方向穿设于固定壳,输入轴设有第一轴肩。第一轴承套设于输入轴,并连接于第一端和输入轴之间,第一轴承的内圈与第一轴肩相抵接。限位套套设于输入轴,且位于第一轴承背离第一轴肩的一侧,限位套抵接于第一轴承的内圈,以与第一轴肩共同限制第一轴承的内圈的轴向位移。
6.第二方面,本技术还提供一种机器人关节模组,包括上述的关节模组的驱动总成以及执行件,执行件连接于输入轴。
7.第三方面,本技术还提供一种机器人,包括机体以及上述的机器人关节模组,机器人关节模组连接于机体。
8.相对于现有技术,本技术提供的关节模组的驱动总成中,第一轴承设置于第一轴肩和限位套之间,第一轴肩抵持于第一轴承的内圈的一侧,限位套抵持于第一轴承的内圈的另一侧。限位套和第一轴肩共同限制第一轴承的内圈的轴向位移,进一步提高了关节模组的驱动总成的轴系稳定性和可靠性。且第一轴肩为输入轴外周壁形状变化形成,无需再额外增加限位结构,所以通过限位套和输入轴配合限位第一轴承,不仅达到可靠限位第一轴承的效果,而且提高了整体结构的紧凑性。
附图说明
9.为了更清楚地说明本技术的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
10.图1是本技术一实施例提供的机器人的模块框图。
11.图2是本技术一实施例提供的机器人关节模组的简化示意图。
12.图3是图2所示机器人关节模组的第二关节主体的爆炸结构示意图。
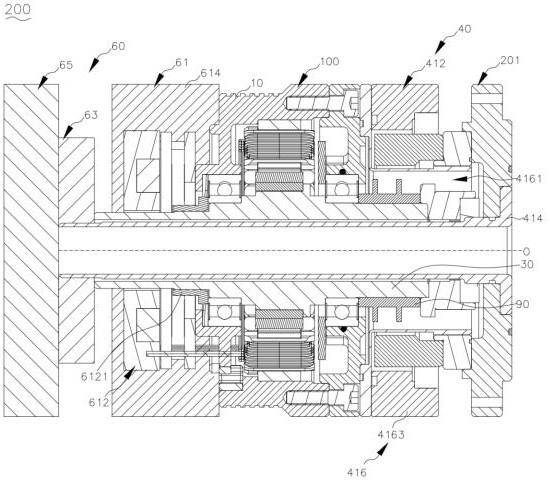
13.图4是图2所示机器人关节模组的关节模组的驱动总成的剖面结构示意图。
14.图5是图4中a部分的放大结构示意图。
15.图6是图4所示关节模组的驱动总成的盖体的立体结构示意图。
16.图7是图4所示关节模组的驱动总成的限位套的立体结构示意图。
17.图8是图4中b部分的放大结构示意图。
18.图9是图4所示关节模组的驱动总成的壳体的立体结构示意图。
19.图10是图2所示第二关节主体的制动组件的制动器转子的立体结构示意图。
具体实施方式
20.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
21.在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。可以是机械连接,也可以是电连接。可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
23.请参阅图1,本技术实施例提供一种机器人关节模组200以及配置有机器人关节模组200的机器人300。
24.本说明书对机器人300的具体类型不作限制,例如,机器人300可以为工业机器人,也可以为协作机器人,在本实施例中,机器人300为协作机器人。机器人300包括机体301、执行端303以及机器人关节模组200。机器人关节模组200连接于执行端303和机体301之间,其用于驱使执行端303相对于机体301运动。在一些实施例中,机器人300可以包括多个执行端303,相应地,机器人300也包括与多个执行端303一一对应的机器人关节模组200,每个执行端303均通过对应的机器人关节模组200连接于机体301。
25.请参阅图2,机器人关节模组200包括关节模组的驱动总成100以及执行件201。关节模组的驱动总成100包括输入轴30,执行件201连接于输入轴30。在一些实施例中,执行件201可以为机器人关节模组200的输出末端,例如其可以包括输出法兰,该输出法兰用于连接由机器人关节模组200驱动的元件(如转台或者手爪等),从而将机器人关节模组200的运动传递至所需的场景中。在另一些实施例中,执行件201可以包括多个执行主体,以用于实
现不同的功能。在本实施例中,机器人关节模组200还可以包括第一关节主体40和第二关节主体60,第一关节主体40和第二关节主体60分别连接于关节模组的驱动总成100的相对两端。第一关节主体40、关节模组的驱动总成100以及第二关节主体60沿输入轴30的轴向o依次并列设置。
26.本说明书对关节第一关节主体40的具体结构不作限制,例如第一关节主体40可以为机器人关节模组200的输出端,也即第一关节主体40可以作为上述的执行件201。在本实施例中,第一关节主体40可以包括输出主体412以及连接于输出主体412的输出法兰,输出主体412连接于关节模组的驱动总成100的一侧,输出法兰可以作为执行件201的至少部分构型。本说明书对输出主体412的具体结构不做限制,例如,输出主体412可以包括法兰连接件、减速器、轴承、密封结构等中的至少一种。关节模组的驱动总成100驱使输入轴30转动,从而驱使执行端303相对于机体301(如图1所示)运动。本说明书对上述“减速器”的具体类型不做限制,在本实施例中,减速器采用谐波减速器416,谐波减速器416连接于关节模组的驱动总成100,谐波减速器416与关节模组的驱动总成100沿输入轴30的轴向o并列设置,谐波减速器416包括通过螺钉连接于输入轴30的波发生器4163,波发生器4163具有油腔4161。
27.第二关节主体60连接于关节模组的驱动总成100背离第一关节主体40的一侧,本说明书对关节第二关节主体60的具体结构不作限制,例如第二关节主体60可以包括制动组件61、编码器组件63以及驱控组件65中的至少一者。制动组件61、编码器组件63以及驱控组件65沿输入轴30的轴向o依次并列设置。
28.在本实施例中,制动组件61包括制动主体612以及制动壳体614,制动主体612套设于输入轴30;制动壳体614连接于制动主体612远离关节模组的驱动总成100的一端,制动壳体614套设于输入轴30。本说明书对制动组件61的具体结构不作限制,例如,制动组件61可以为电磁式抱闸机构,则制动主体612可以包括制动电磁铁和闸瓦制动器。在本实施例中,制动组件61可以为无励磁制动器,制动壳体614为刹车固定壳,制动主体612可以包括制动器定子(图中未标出)、制动器转子6121和摩擦片(图中未标出),制动器定子固定安装于制动壳体614。在失电的情况下,摩擦片被制动器定子自身的弹簧机构压紧,与制动器定子保持相对静止。制动器转子6121固定安装于输入轴30,制动器转子6121止转连接于摩擦片;当制动组件61通电时,摩擦片将会被释放,此时输入轴30通过制动器转子6121带动摩擦片同步转动。
29.请同时参阅图2和图3,驱控组件65连接于制动组件61背离关节模组的驱动总成100的一侧,驱控组件65通过安装支柱652连接于制动壳体614,安装支柱652支撑于驱控组件65和制动组件61之间,以使驱控组件65与制动组件61相对间隔设置。驱控组件65可以包括安装板654以及驱动板656,驱动板656与安装板654沿输入轴30的轴向o并列间隔设置,安装板654位于驱动板656和制动壳体614之间。其中,驱动板656可以为控制电路板。安装板654与制动壳体614同轴设置,安装板654朝向制动壳体614的一侧设有用于与编码器组件63配合的读头。
30.编码器组件63设置于驱控组件65和制动组件61之间,编码器组件63用于与驱控组件65的读头配合采集输入轴30的运动参数。在本实施例中,编码器组件63可以包括安装座和磁环(图中均未示出),安装座连接于输入轴30,磁环通过轴孔配合以胶粘的方式固定于安装座,磁环与驱控组件65的读头沿输入轴30的轴向o相对间隔设置。
31.请同时参阅图2和图4,关节模组的驱动总成100设置于制动组件61和第一关节主体40之间,其用于驱使输入轴30转动以驱使执行端303相对于机体301运动。关节模组的驱动总成100包括电机20、固定壳10、第一轴承50以及上述的输入轴30,电机20设置于固定壳10内,输入轴30连接于电机20并穿设于固定壳10,第一轴承50设置于固定壳10和输入轴30之间。
32.电机20包括转子21和定子23,定子23可转动地套设于转子21外,定子23通过胶粘的方式固定于固定壳10的内壁,转子21通过胶粘的方式连接于输入轴30。电机20通过转子21驱使输入轴30转动,从而通过输入轴30驱动机器人300(如图1所示)部分关节的运动。在一些实施例中,电机20也可以采用其他旋转驱动件来代替,例如回转液压缸、气动马达等。
33.在本实施例中,关节模组的驱动总成100还包括输出轴414,输出轴414穿设于输入轴30并与输入轴30传动(例如可转动地)连接。输出轴414可以通过减速机构或者其他传动机构连接于输入轴30,并通过输入轴30连接于电机20,以在电机20的驱动下转动,从而实现机器人200部分关节的运动。输出轴414和输入轴30之间嵌套的轴体结构,不仅节省了安装空间,而且提高了扭矩传递的效率。
34.固定壳10用于安装电机20,固定壳10沿输入轴30的轴向o具有相对的第一端11以及第二端12,第一端11为固定壳10靠近第一关节主体40的一端,第二端12为固定壳10靠近制动组件61的一端。具体而言,固定壳10包括壳体13以及盖体14,盖体14连接于壳体13的一端形成固定壳10的第一端11。在本实施例中,壳体13大致呈筒状,壳体13包括周壁132和底壁134,周壁132形成固定壳10的筒状外形,底壁134固定连接于周壁132的端部以形成固定壳10的第二端12。底壁134连接于周壁132一端的构型,可以使壳体13背离底壁134的一端呈敞口结构。
35.请同时参阅图4和图5,盖体14盖设于上述壳体13背离底壁134一端的敞口处。盖体14朝向壳体13的一侧设置有凸台,盖体14盖合于敞口处时,该凸台嵌合于盖体14的敞口端内以达到定位壳体13和盖体14的效果。壳体13和盖体14之间可以通过螺钉固定连接。在本实施例中,盖体14包括盖体主体141以及限位凸缘143,盖体主体141通过螺钉连接于壳体13。盖体主体141设有容纳孔1412,容纳孔1412沿输入轴30的轴向o贯穿盖体主体141。限位凸缘143位于容纳孔1412内,限位凸缘143相较于容纳孔1412的内壁凸出,限位凸缘143用于限制第一轴承50的轴向位移。
36.输入轴30穿设于壳体13的底壁134以及盖体主体141,输入轴30穿设于容纳孔1412。在本实施例中,输入轴30包括轴体33、第一轴肩31以及第二轴肩32,第一轴肩31和第二轴肩32均与轴体33一体成型。第一轴肩31位于固定壳10内且靠近第一端11处,第一轴肩31相对于轴体33的外周壁凸起以与输入轴30的外周壁形成阶梯状结构。第二轴肩32位于固定壳10内且靠近第二端12处,第二轴肩32相对于输入轴30的外周壁凸起以与轴体33的外周壁形成阶梯状结构。
37.请参阅图4至图6,第一轴承50套设于输入轴30,并设置于固定壳10的第一端11和输入轴30之间,其用于提高关节模组的驱动总成100轴系的承载能力和支撑刚性。第一轴承50套设于输入轴30且位于容纳孔1412内。第一轴承50大致包括第一外圈53、第一滚珠54和第一内圈55,第一内圈55同轴设置于第一外圈53内,第一滚珠54可转动地设置于第一外圈53和第一内圈55之间。
38.为了提高第一轴承50和盖体14之间的密封性,在一些实施例中,第一轴承50位于容纳孔1412所限定的空间内,第一外圈53和容纳孔1412的内壁之间设有密封圈1414,密封圈1414可以环绕在第一外圈53之外,并由第一外圈53和容纳孔1412的孔壁挤压限位。进一步地,容纳孔1412的孔壁可以设有密封凹槽(图中未标出),密封圈1414嵌入该密封凹槽中。第一轴承50位于容纳孔1412所限定的空间内时,第一轴承50具体地位于第一轴肩31的阶梯面和限位凸缘143之间,且第一轴肩31的阶梯面与第一内圈55背离限位凸缘143的一侧相抵接,限位凸缘143与第一外圈53背离第一轴肩31的一侧相抵接。其中,“抵接”可以理解为接触或者叠置以限制轴向安装位置,第一轴肩31的阶梯面与第一内圈55之间可以存在支持力也可以不存在支持力,第一外圈53和限位凸缘143之间可以存在支持力也可以不存在支持力。
39.为了与第一轴肩31配合共同限制第一内圈55的轴向位移,在本实施例中,关节模组的驱动总成100还可以包括限位套90。限位套90套设于输入轴30,且位于第一轴承50背离第一轴肩31的一侧。限位套90的端部抵持于第一内圈55背离第一轴肩31的一侧,限位套90和第一轴肩31共同限制第一内圈55的轴向位移,进一步提高了关节模组的驱动总成100的轴系稳定性和可靠性。第一轴肩31为输入轴30外周壁形状变化形成,无需再额外增加限位结构,所以通过限位套90和输入轴30配合限位第一轴承50,不仅达到可靠限位第一轴承50的效果,而且提高了整体结构的紧凑性。
40.为了与限位凸缘143配合共同限制第一外圈53的轴向位移,在本实施例中,关节模组的驱动总成100还可以包括第一限位件52,第一限位件52设置于壳体13内且固定连接于盖体主体141,第一限位件52抵持于第一外圈53背离限位凸缘143的一侧。本说明书对第一限位件52的具体结构不做限制,例如,第一限位件52可以为环形板状结构,或者,第一限位件52可以包括多块限位板,多块限位板沿容纳孔1412的周向间隔分布并均连接于盖体14。在本实施例中,第一限位件52大致为圆环形压板。第一限位件52与限位凸缘143间隔相对,为了便于安装第一限位件52,盖体主体141的内侧设有连接凸台1416。连接凸台1416相对于盖体主体141的内壁凸出,连接凸台1416环绕形成在容纳孔1412的外周,连接凸台1416通过多个螺钉与第一限位件52固定连接。第一限位件52和限位凸缘143共同限制第一外圈53的轴向位移,提高第一轴承50外圈限位的可靠性,提高了关节模组的驱动总成100传动的稳定性和可靠性。
41.因此,在本实施例中,第一限位件52、限位凸缘143限制第一外圈53的轴向位移,第一轴肩31和限位套90限制第一内圈55的轴向位移,第一轴承50形成四点接触的、内外圈轴向趋近完全约束的状态,从而一定程度上避免了因波发生器4163的轴向力引起关节模组的驱动总成100的轴系发生轴向作动影响整体性能的情况,使得输入轴30轴系承载能力更好,支撑刚性更高,有助于提高机器人关节模组200整体结构的寿命,降低甚至避免在运行过程中产生噪音、振动、异响等情况。
42.请同时参阅图2和图7,在本实施例中,限位套90包括套体92以及翅片94,套体92套设于输入轴30且位于第一轴承50和谐波减速器416之间。套体92背离第一轴承50的一端位于谐波减速器416内,具体地,位于波发生器4163的油腔4161内,且套体92背离第一轴承50的一端抵持于波发生器4163的内壁上,套体92的另一端抵持于第一内圈55,进一步提高了第一内圈55限位的可靠性。套体92大致呈圆柱套筒状,本说明书对套体92的具体材质不做
限制,套体92可以选用轻量化的材质(例如工程塑料或铝合金等)以在一定程度上降低整体重量。
43.翅片94连接于套体92的外周,并沿着输入轴30的径向相对于套体92凸伸。翅片94连接于套体92位于油腔4161内的周壁上,翅片94大致环形板状,翅片94的外径大于容纳孔1412的孔径,从而起到阻止油腔4161内的油通过容纳孔1412进入固定壳10内的效果。输入轴30转动时,带动套体92以及翅片94转动,翅片94转动过程中还能起到甩油的作用,从而进一步减小谐波减速器416内的润滑油进入固定壳10内的可能性。翅片94的数量设置有两个,两个翅片94沿套体92的轴向间隔排列,两个翅片94进一步提高挡油、甩油的效果。
44.请同时参阅图4和图8,在本实施例中,关节模组的驱动总成100还包括第二轴承70,第二轴承70套设于输入轴30,并连接于第二端12和输入轴30之间。第二轴承70与第一轴承50的结构大致相同,第二轴承70可以包括第二外圈73、第二滚珠74以及第二内圈75。第二内圈75同轴设置于第二外圈73内,第二滚珠74可转动地设置于第二外圈73和第二内圈75之间。进一步地,为适应于第二轴承70和输入轴30的安装,请参阅图9,壳体13的底壁134可以开设有安装孔1341,安装孔1341沿着输入轴30的轴向o贯穿底壁134,输入轴30穿设于安装孔1341。底壁134设有挡板1343,挡板1343位于安装孔1341内,挡板1343相较于安装孔1341的内壁凸出。第二轴承70套设于输入轴30上、位于安装孔1341内,且位于挡板1343朝向第一端11的一侧,挡板1343与第二轴承70沿输入轴30的轴向o相对间隔设置。
45.第二外圈73轴向呈自由状态,在一些实施例中,关节模组的驱动总成100还包括弹性垫圈17,弹性垫圈17弹性地抵持于挡板1343和第二外圈73之间。本说明书对弹性垫圈17的具体结构不做限制,在本实施例中,弹性垫圈17采用波形垫圈,波形垫圈又称波浪垫圈,是一种有规则呈波浪形的圆形薄片,用于防止松动,减缓冲击,波形垫圈具备良好的弹性及抗冲击等性能。第二外圈73轴向呈自由状态,且设置有弹性垫圈17,一定程度上消除了轴系组件装配间隙以及轴承游隙,而且可以通过弹性垫圈17给第二轴承70施加一定的预压力以提高轴系的支撑刚性,降低噪音及振动的产生。
46.在本实施例中,第二轴承70位于第二轴肩32朝向第一端11的一侧,第二轴肩32的阶梯面抵持于第二内圈75。其中,“抵接”可以理解为接触或者叠置以限制轴向安装位置,第二轴肩32的阶梯面与第二内圈75之间可以存在支持力也可以不存在支持力。
47.为了与第二轴肩32配合共同限制第二内圈75的轴向位移,在本实施例中,关节模组的驱动总成100还可以包括第二限位件72。第二限位件72连接于输入轴30,第二限位件72抵接于第二内圈75背离第二轴肩32的一侧。第二限位件72与第二轴肩32共同限制第二内圈75的轴向位移,进一步提高了关节模组的驱动总成100的轴系稳定性和可靠性。本说明书对第二限位件72的具体结构不做限制,例如,第二限位件72可以为套设于输入轴30的限位环。在本实施例中,第二限位件72为制动组件61的制动器转子6121。制动器转子6121通过压装的方式与输入轴30过盈连接,制动器转子6121朝向第二轴承70的一端与第二内圈75相抵持。为了方便后期的维护拆卸,如图10所示,制动器转子6121的周壁上还设置有螺纹孔,通过旋入螺钉可以将制动器转子6121沿轴向顶出。
48.第二轴肩32为输入轴30外周壁形状变化形成,第二限位件72为制动器转子6121,第二内圈75的限位均通过关节模组的驱动总成100的其他结构实现,无需再额外增加限位结构,所以本技术实施例的关节模组的驱动总成100不仅能够达到可靠限位第二轴承70的
效果,而且提高了整体结构的紧凑性。
49.本技术实施例提供的关节模组的驱动总成100中,第一限位件52、限位凸缘143限制第一外圈53的轴向位移,第一轴肩31和限位套90限制第一内圈55的轴向位移,第一轴承50形成四点接触的、内外圈轴向趋近完全约束的状态,从而一定程度上避免了因波发生器4163的轴向力引起关节模组的驱动总成100的轴系发生轴向作动,影响整体性能的情况。制动器转子6121与第二轴肩32共同限制第二内圈75的轴向位移,进一步提高了关节模组的驱动总成100的轴系稳定性和可靠性。第二外圈73轴向自由,且设置有弹性垫圈17,一定程度上消除了轴系组件装配间隙以及轴承游隙,而且可以通过弹性垫圈17给第二轴承70施加一定的预压力以提高轴系的支撑刚性,降低噪音及振动的产生。
50.本技术实施例的关节模组的驱动总成100通过改变已有部件的形状位置来限制第一轴承50和第二轴承70的轴向位移,不仅提高了第一轴承50和第二轴承70限位的可靠性,而且提高了整体结构的紧凑性。基于可靠的限位结构,机器人关节模组200在工作时,由波发生器4163所带来的轴向力,并不会造成输入轴30系沿轴向窜动,而且第一轴承50和第二轴承70均为同型号的大轴承,承载能力强,轴系支撑的可靠性也较高。
51.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
52.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
53.最后应说明的是:以上实施例仅用以说明本技术的技术方案,而非对其限制。尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。而这些修改或者替换,并不驱使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1