自主驾驶机器人的制作方法
1.本实用新型涉及运输机器人技术领域,具体涉及自主驾驶机器人。
背景技术:
2.随着计算机和微电子技术的快速发展,智能化程度越来越高,无人驾驶技术也得到了快速发展,其广泛应用于物流运输行业。
3.在通过自主驾驶机器人进行室外货物搬运时,现有的自主驾驶机器人缺少防雨机构,在运输过程中,会导致货物被淋湿,给正常的运输带来不便,因此,需要对现有的自主驾驶机器人进行改进。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型提供的自主驾驶机器人,提高遮挡板的防雨效果,降低货物被淋湿的概率。
5.为了解决上述技术问题,本实用新型提出以下技术方案:
6.自主驾驶机器人,包括底盘,底盘的前端固定安装有第一支撑块,第一支撑块的顶端安装有三维激光雷达、差分gps定位器和湿度传感器,底盘的中心区域安装有第二支撑块,第二支撑块的上方设有两个相互铰接遮挡板,两个遮挡板之间的铰接轴与第一支撑块固定连接,第二支撑块上对称地安装有两个升降机构,两个升降机构分别与两个遮挡板驱动连接,两个遮挡板的边缘均铰接有折叠板,遮挡板上设置有用于驱动折叠板转动的伸缩机构,底盘的下方设置有行走机构,行走机构、三维激光雷达、差分gps定位器、湿度传感器、两个升降机构和两个伸缩机构均与控制器电连接。
7.进一步地,所述第一支撑块上固定安装有控制面板,控制面板与控制器电连接。
8.进一步地,所述升降机构的驱动端固定安装有第一套环,遮挡板的下表面固定安装有第一滑环,第一套环套设在第一滑环上。
9.进一步地,所述遮挡板的下表面固定安装有凸块,凸块与伸缩机构的固定端铰接,伸缩机构的驱动端固定安装有第二套环,折叠板的内表面固定安装有第二滑环,第二套环套设在第二滑环上。
10.进一步地,所述行走机构包括两个前轮和两个后轮,两个前轮和两个后轮均通过连杆与所述底盘转动连接,所述底盘位于两个前轮之间安装有驱动电机,驱动电机的输出轴上同轴连接有主动齿轮,两个前轮的连杆上均同轴连接有从动齿轮,主动齿轮与从动齿轮啮合,驱动电机与控制器电连接。
11.进一步地,所述底盘的内部设置有空腔,连杆的顶端穿过底盘的下表面的通孔延伸至空腔的内部并与空腔的上侧壁转动连接,驱动电机安装在空腔的下侧壁上,主动齿轮和从动齿轮均位于空腔内。
12.由上述技术方案可知,本实用新型的有益效果:通过三维激光雷达采集三维画面并将采集画面数据发送给控制器进行处理,通过gps差分定位器进行定位,并将定位信息发
送给控制器进行处理,控制器根据采集画面数据以及定位信息控制行走机构进行行走和避障,实现自主驾驶。在自主驾驶过程中,通过湿度传感器检测室外环境中的湿度,当检测的湿度大于设定的湿度阈值时,控制器控制两个升降机构下降,使两个遮挡板之间的夹角小于180度,同时,控制器控制两个伸缩机构伸长,带动两个折叠板展开,以增大遮挡板的遮挡面积,提高遮挡板的防雨效果,降低货物被淋湿的概率。
附图说明
13.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
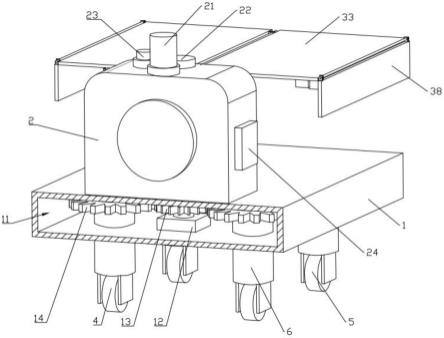
14.图1为本实用新型的结构示意图;
15.图2为本实用新型的后视图;
16.图3为本实用新型a处的放大图;
17.图4为本实用新型b处的放大图。
18.附图标记:
19.1-底盘;2-第一支撑块;3-第二支撑块;4-前轮;5-后轮;6-连杆;
20.11-空腔;12-驱动电机;13-主动齿轮;14-从动齿轮;21-三维激光雷达;22-差分gps定位器;23-湿度传感器;24-控制面板;31-升降机构;32-第一套环;33-遮挡板;34-铰接轴;35-第一滑环;36-凸块;37-伸缩机构;38-折叠板;
21.371-第二套环;381-第二滑环。
具体实施方式
22.下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
23.参阅图1-图4所示,本实施例提供的自主驾驶机器人,包括底盘1,底盘1的前端固定安装有第一支撑块2,第一支撑块2的顶端安装有三维激光雷达21、差分gps定位器22和湿度传感器23,底盘1的中心区域安装有第二支撑块3,第二支撑块3的上方设有两个相互铰接遮挡板33,两个遮挡板33之间的铰接轴34与第一支撑块2固定连接,第二支撑块3上对称地安装有两个升降机构31,两个升降机构31分别与两个遮挡板33驱动连接,两个遮挡板33的边缘均铰接有折叠板38,遮挡板33上设置有用于驱动折叠板38转动的伸缩机构37,底盘1的下方设置有行走机构,行走机构、三维激光雷达21、差分gps定位器22、湿度传感器23、两个升降机构31和两个伸缩机构37均与控制器电连接。控制器为stm32单片机控制器或plc控制器。升降机构31和伸缩机构37均可选用电动伸缩杆或电缸。
24.在实际使用中,通过三维激光雷达21采集三维画面并将采集画面数据发送给控制器进行处理,通过gps差分定位器进行定位,并将定位信息发送给控制器进行处理,控制器根据采集画面数据以及定位信息控制行走机构进行行走和避障,实现自主驾驶。在自主驾驶过程中,通过湿度传感器23检测室外环境中的湿度,当检测的湿度大于设定的湿度阈值
时,控制器控制两个升降机构31下降,使两个遮挡板33之间的夹角小于180度,增强排雨效果,同时,控制器控制两个伸缩机构37伸长,带动两个折叠板38展开,以增大遮挡板33的遮挡面积,提高遮挡板33的防雨效果,降低货物被淋湿的概率。两个遮挡板33的铰接处下方设有防雨膜,防雨膜的两端分别与两个遮挡板33的下表面粘接,避免两个遮挡板33的铰接处漏雨。
25.需要说明的是,控制器对采集画面数据和定位信息进行处理并根据处理后的采集画面数据和定位信息控制行走机构进行行走、停止和转向的方法为现有技术,故不赘述。
26.在本实施例中,第一支撑块2上固定安装有控制面板24,控制面板24与控制器电连接。
27.在实际使用中,通过手动操作控制面板24,控制行走机构开始行走、停止、转向等操作。
28.在本实施例中,升降机构31的驱动端固定安装有第一套环32,遮挡板33的下表面固定安装有第一滑环35,第一套环32套设在第一滑环35上。
29.在实际使用中,升降机构31升降的过程中,通过第一套环32和第一滑环35相互配合实现对遮挡板33的驱动作用。当湿度传感器23检测的湿度小于设定的阈值时,控制器控制升降机构31上升,使两个遮挡板33之间的夹角为180度。
30.在本实施例中,遮挡板33的下表面固定安装有凸块36,凸块36与伸缩机构37的固定端铰接,伸缩机构37的驱动端固定安装有第二套环371,折叠板38的内表面固定安装有第二滑环381,第二套环371套设在第二滑环381上。
31.在实际使用中,在伸缩机构37伸缩过程中,通过第二套环371和第二滑环381相互配合实现对折叠板38的驱动作用。当湿度传感器23检测的湿度小于设定的阈值时,控制器控制伸缩机构37缩短,使折叠板38处于与遮挡板33垂直的位置。
32.在本实施例中,行走机构包括两个前轮4和两个后轮5,两个前轮4和两个后轮5均通过连杆6与底盘1转动连接,底盘1位于两个前轮4之间安装有驱动电机12,驱动电机12的输出轴上同轴连接有主动齿轮13,两个前轮4的连杆6上均同轴连接有从动齿轮14,主动齿轮13与从动齿轮14啮合,驱动电机12与控制器电连接。
33.在实际使用中,通过控制器控制驱动电机12转动,带动主动齿轮13转动,主动齿轮13转动带动连杆6上的从动齿轮14转动,使两个前轮4同向转动,实现自主驾驶机器人的转向。
34.在本实施例中,底盘1的内部设置有空腔11,连杆6的顶端穿过底盘1的下表面的通孔延伸至空腔11的内部并与空腔11的上侧壁转动连接,驱动电机12安装在空腔11的下侧壁上,主动齿轮13和从动齿轮14均位于空腔11内。
35.在实际使用中,驱动电机12、主动齿轮13和从动齿轮14位于空腔11内,加强对驱动电机12、主动齿轮13和从动齿轮14的保护作用。
36.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1