一种用于清洗光伏电池板的智能机器人
1.本实用新型涉及机器人技术领域,特别是涉及一种用于清洗光伏电池板的智能机器人。
背景技术:
2.随着全球气候变暖,作为清洁可再生且丰富的资源,太阳能有很大的应用前景。太阳能在未来有可能成为替代其他能源的重要绿色能源。目前,对于太阳能的能源性利用途径主要是通过光伏电池板的光电效应将太阳光能转化成电能,而光伏电池板表面的光洁度对光电转换效率有重要影响,因为太阳能光场中的太阳能光伏电池板长期暴露在室外环境中,空气中的灰尘颗粒物、杂质很容易积累在太阳能光伏电池板表面,在很大程度上造成光电转化效率的下降,有研究表明,每平方米若有4.05g灰尘的灰尘层就会使光伏电池板的光电转换效率下降约40%。因此,太阳能光电站建立后,太阳能光伏电池板表面的清洁和维护在太阳能光电站的运行费用比重极大,太阳能光伏电池板表面的清洁和维护也是太阳能光伏推广使用中面临的重要问题之一,而目前针对太阳能光伏电池板表面的清洁和维护主要还是人工(用拖布)清理,其作业时间一般具有周期性,且工作效率低,人工成本高,在水资源匮乏的地区还存在水资源利用效率低的问题,同时还存在中暑等安全隐患。
技术实现要素:
3.基于上述问题,提供一种清洁效率高,综合成本低,水资源利用充分,且能够随时进行清洗作业的用于清洗光伏电池板的智能机器人。
4.一种用于清洗光伏电池板的智能机器人,包括载物机器人本体、多关节机械臂及若干车载清洁机器人;所述载物机器人本体设置有载物平台,在所述载物平台上设置有若干充电柱,所述充电柱的侧面设置有若干对电源触片;所述车载清洁机器人的侧面设置有把手,并设置有贯穿所述车载清洁机器人上下表面的限位通孔;所述多关节机械臂的一端设置底座与所述载物平台连接,另一端设置夹持机构;若干所述车载清洁机器人通过所述限位通孔套在所述充电柱上垂直叠放,所述限位通孔的壁面设置有用于与所述电源触片接触的充电触头;所述多关节机械臂用于通过所述夹持机构夹持所述把手,将所述车载清洁机器人从所述充电柱上取走并运送到待清洗的光伏板上,或将所述车载清洁机器人套在所述充电柱上垂直叠放。
5.在其中一个实施例中,所述载物机器人本体还设置有车载净水箱、车载污水箱,以及与所述净水箱连通的加水口和出水口,与所述车载污水箱连通的排污口和进污口;所述车载清洁机器人还设置有净水箱、污水箱,以及与所述净水箱连通的注水口,与所述污水箱连通的吸污口;还包括加水系统和排污系统,所述加水系统包括依次连通的注水枪、输水管及吸水管,所述排污系统包括依次连通的吸污枪、输污管及排污管,所述注水枪、所述吸污枪与所述夹持机构设置在所述多关节机械臂的同一端,所述输水管、所述吸水管、所述输污管及所述排污管与所述多关节机械臂连接,所述吸水管还通过所述出水口与所述净水箱连
通,所述排污管还通过所述进污口与所述污水箱连通,所述加水系统还包括用于为水输送提供动力的水泵,所述排污系统还包括用于为污水输送提供动力的排污泵。
6.在其中一个实施例中,所述多关节机械臂还设置加水系统和排污系统,所述加水系统包括依次连通的注水枪、输水管及吸水管,所述排污系统包括依次连通的吸污枪、输污管及排污管,所述注水枪、所述吸污枪与所述夹持机构设置在所述多关节机械臂的同一端。
7.在其中一个实施例中,所述充电柱在所述电源触片附近还设置有感应开关;所述感应开关用于检测所述车载清洁机器人是否到达设定位置或所述电源触片是否与所述充电触头接触。
8.在其中一个实施例中,所述感应开关还用于控制所述电源触片是否得电和电源输出参数。
9.在其中一个实施例中,所述载物平台上还设置有滑轨,所述多关节机械臂的所述底座与所述载物平台通过所述滑轨滑动连接。
10.在其中一个实施例中,还包括第一摄像头;所述第一摄像头与所述多关节机械臂固定连接或转动连接;所述第一摄像头与所述夹持机构设置在所述多关节机械臂的同一端。
11.在其中一个实施例中,所述第一摄像头为焦距可调节的摄像头。
12.在其中一个实施例中,还包括第一滑杆、第二滑杆、第一滑块、第二滑块及扫码装置;所述第一滑杆竖直设置,且与所述载物机器人本体固定连接;所述第一滑块与所述第一滑杆在竖直方向上滑动连接;所述第二滑杆水平设置,且与所述第一滑块固定连接;所述第二滑块与所述第一滑杆在水平方向上滑动连接;所述扫码装置安装在所述第二滑块上。所述扫码装置用于获取待清晰的光伏电池板的身份编码。
13.在其中一个实施例中,所述第一滑杆、所述第二滑杆、所述第一滑块、所述第二滑块及所述扫码装置设置在所述载物平台上。
14.在其中一个实施例中,还包括第一通讯装置及第二通讯装置;所述第一通讯装置用于通过卫星与控制台进行远程通讯,所述第二通讯装置用于直接与所述车载清洁机器人进行通讯。
15.在其中一个实施例中,还包括竖直固定设置在所述载物机器人本体上的伸缩支架、及设置在所述伸缩支架顶端的第二摄像头;所述伸缩支架与所述第二摄像头转动副连接,且所述伸缩支架与所述第二摄像头之间设置有矢量角度传感器用于获取所述第二摄像头相对于所述伸缩支架转动时的转角大小和转动方向;所述伸缩支架用于自动调节所述第二摄像头距离地面的高度,并为所述矢量角度传感器提供固定参考基准;所述第二摄像头为全景摄像头。
16.在其中一个实施例中,所述第二摄像头用于获取所述载物机器人本体周围障碍物的彩色图像,以辅助判周围环境中物体的物理和/或化学属性。
17.在其中一个实施例中,所述第二摄像头与所述伸缩支架之间通过相机稳定器连接;所述相机稳定器与所述伸缩支架之间转动副连接。
18.在其中一个实施例中,还包括镜头支撑杆和重力块;所述镜头支撑杆垂直固定安装在所述相机稳定器的相机安装座上;所述第二摄像头设置在所述镜头支撑杆的顶端;所述重力块设置在所述相机安装座的背面,以降低所述第二摄像头的重心,以及提高所述相
机安装座相对于所述相机稳定器的扭矩,从而使得所述镜头支撑杆保持竖直状态;所述矢量角度传感器设置在所述伸缩支架与所述相机稳定器之间,用以获取所述相机稳定器相对于所述伸缩支架转动时的转角大小和转动方向。
19.在其中一个实施例中,还包括设置在所述载物机器人本体四周的激光雷达;所述激光雷达用于获取所述载物机器人本体与其周围障碍物之间的距离。
20.在其中一个实施例中,所述注水口设置有橡胶封口,所述橡胶封口中间设置有通孔或十字贴刀,以便于注水时所述注水枪插穿所述橡胶封口与所述净水箱连通;所述吸污口内设置有单向阀,吸污时所述吸污枪插入所述吸污口时会将所述单向阀往里抵,以使所述吸污枪与所述污水箱连通。
21.在其中一个实施例中,所述充电触头可伸缩。
22.在其中一个实施例中,所述水泵和所述排污泵与所述底座固定连接。
23.上述提供的一种用于清洗光伏电池板的智能机器人,通过在载物机器人本体设置载物平台,并在载物平台上设置多关节机械臂和若干充电柱,然后将多个车载清洁机器人穿插叠放在充电柱上,需要清洁光伏电池板时,通过多关节机械臂将多个车载清洁机器人从充电柱上取走并运送到待清洗的光伏板上,使得多个车载清洁机器人能够同时分区域工作,当清洁完毕后,载物机器人本体会将移动至已完成工作的车载清洁机器人附近,通过多关节机械臂将车载清洁机器人逐个从光伏板上拿起套在充电柱上垂直叠放。不仅非常高效,而且可由机器人自动完成,无需人工操作,即使在酷暑的极端天气也能随时完成光伏板的清洗工作,且由于不是采用水冲式清洗,水资源利用更充分,综合成本低。
附图说明
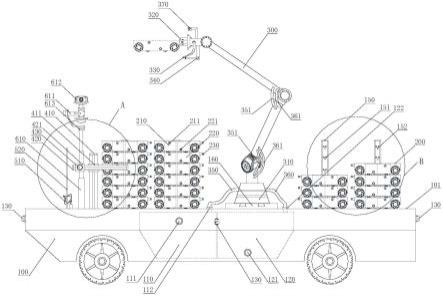
24.图1为一个或多个实施例中机器人的基本结构示意图;
25.图2为一个或多个实施例中机器人a部放大结构示意图;
26.图3为一个或多个实施例中机器人b部放大结构示意图;
27.图4为一个或多个实施例中车载清洁机器人俯视结构示意图。
28.附图标记说明:
29.100.载物机器人本体;110.车载净水箱;111.加水口;112.出水口;120.车载污水箱;121.排污口;122.进污口;130.激光雷达;150.充电柱;151.电源触片;152.感应开关;160.滑轨;200.车载清洁机器人;210.净水箱;211.注水口;220.污水箱;221.吸污口;230.把手;240限位通孔;300.多关节机械臂;310.底座;320.夹持机构;330.注水枪;340.吸污枪;350.吸水管;351.输水管;360.排污管;361.输污管;370.第一摄像头;410.第一滑杆;411.第一滑块;420.第二滑杆;421.第二滑块;430.扫码装置;510.第一通讯装置;520.第二通讯装置;610.伸缩支架;611.相机稳定器;612.第二摄像头;613.矢量角度传感器。
具体实施方式
30.在本专利文件中,下面讨论的图1-3和用于描述本公开的原理或方法的各种实施例只用于说明,而不应以任何方式解释为限制了本公开的范围。本领域的技术人员应理解的是,本公开的原理或方法可在任何适当布置的机器人中实现。参考附图,本公开的优选实施例将在下文中描述。在下面的描述中,将省略众所周知的功能或配置的详细描述,以免以
不必要的细节混淆本公开的主题。而且,本文中使用的术语将根据本实用新型的功能定义。因此,术语可能会根据用户或操作者的意向或用法而不同。因此,本文中使用的术语必须基于本文中所作的描述来理解。
31.一种用于清洗光伏电池板的智能机器人,如图1所示,包括载物机器人本体100、多关节机械臂300及若干车载清洁机器人200。载物机器人本体100设置有载物平台,在载物平台上设置有若干充电柱150,充电柱150的侧面设置有若干对电源触片151(如图3所示)。车载清洁机器人200的侧面设置有把手230,并设置有贯穿车载清洁机器人200上下表面的限位通孔240(如图4所示)。多关节机械臂300的一端设置底座310与载物平台连接,另一端设置夹持机构320。若干车载清洁机器人200通过限位通孔240套在充电柱150上垂直叠放,限位通孔240的壁面设置有用于与电源触片151接触的充电触头。多关节机械臂300用于通过夹持机构320夹持把手230,将车载清洁机器人200从充电柱150上取走并运送到待清洗的光伏板上,或将车载清洁机器人200套在充电柱150上垂直叠放。如此设置,当需要清洁光伏电池板时,可通过多关节机械臂300将多个车载清洁机器人200从充电柱150上取走并运送到待清洗的光伏板上,使得多个车载清洁机器人200能够同时分区域工作,当清洁完毕后,载物机器人本体100会将移动至已完成工作的车载清洁机器人200附近,通过多关节机械臂300将车载清洁机器人200逐个从光伏板上拿起套在充电柱150上垂直叠放。不仅非常高效,而且可由机器人自动完成,无需人工操作,即使在酷暑的极端天气也能随时完成光伏板的清洗工作,且由于不是采用水冲式清洗,水资源利用更充分,综合成本低。
32.在其中一个实施例中,如图1所示,载物机器人本体100还设置有车载净水箱210110、车载污水箱220120,以及与净水箱210连通的加水口111和出水口112,与车载污水箱220120连通的排污口121和进污口122。如图3所示,车载清洁机器人200还设置有净水箱210、污水箱220,以及与净水箱210连通的注水口211,与污水箱220连通的吸污口221。还包括加水系统和排污系统,加水系统包括依次连通的注水枪330、输水管351及吸水管350,排污系统包括依次连通的吸污枪340、输污管361及排污管360,注水枪330、吸污枪340与夹持机构320设置在多关节机械臂300的同一端,输水管351、吸水管350、输污管361及排污管360与多关节机械臂300连接,吸水管350还通过出水口112与净水箱210连通,排污管360还通过进污口122与污水箱220连通,加水系统还包括用于为水输送提供动力的水泵(图中未画出),排污系统还包括用于为污水输送提供动力的排污泵(图中未画出)。
33.在其中一个实施例中,如图1所示,多关节机械臂300还设置加水系统和排污系统,加水系统包括依次连通的注水枪330、输水管351及吸水管350,排污系统包括依次连通的吸污枪340、输污管361及排污管360,注水枪330、吸污枪340与夹持机构320设置在多关节机械臂300的同一端。
34.在其中一个实施例中,如图3所示,充电柱150在电源触片151附近还设置有感应开关152。感应开关152用于检测车载清洁机器人200是否到达设定位置或电源触片151是否与充电触头接触。
35.在其中一个实施例中,感应开关152还用于控制电源触片151是否得电和电源输出参数。
36.在其中一个实施例中,如图1所示,载物平台上还设置有滑轨160,多关节机械臂300的底座310与载物平台通过滑轨160滑动连接。
37.在其中一个实施例中,如图1所示,还包括第一摄像头370。第一摄像头370与多关节机械臂300固定连接或转动连接。第一摄像头370与夹持机构320设置在多关节机械臂300的同一端。
38.在其中一个实施例中,第一摄像头370为焦距可调节的摄像头。如此设置,可以用于近距离观察光伏电池板的清洁情况。
39.在其中一个实施例中,如图1或图2所示,还包括第一滑杆410、第二滑杆420、第一滑块411、第二滑块421及扫码装置430。第一滑杆410竖直设置,且与载物机器人本体100固定连接。第一滑块411与第一滑杆410在竖直方向上滑动连接。第二滑杆420水平设置,且与第一滑块411固定连接。第二滑块421与第一滑杆410在水平方向上滑动连接。扫码装置430安装在第二滑块421上,用于获取待清晰的光伏电池板的身份编码。
40.在其中一个实施例中,如图1或图2所示,第一滑杆410、第二滑杆420、第一滑块411、第二滑块421及扫码装置430设置在载物平台上。
41.在其中一个实施例中,如图1或图2所示,还包括第一通讯装置510及第二通讯装置520。第一通讯装置510用于通过卫星与控制台进行远程通讯,第二通讯装置520用于直接与车载清洁机器人200进行通讯。
42.在其中一个实施例中,如图1所示,还包括竖直固定设置在载物机器人本体100上的伸缩支架610、及设置在伸缩支架610顶端的第二摄像头612。伸缩支架610与第二摄像头612转动副连接,且伸缩支架610与第二摄像头612之间设置有矢量角度传感器613用于获取第二摄像头612相对于伸缩支架610转动时的转角大小和转动方向。伸缩支架610用于自动调节第二摄像头612距离地面的高度,并为矢量角度传感器613提供固定参考基准。第二摄像头612为全景摄像头。
43.在其中一个实施例中,第二摄像头612用于获取载物机器人本体100周围障碍物的彩色图像,以辅助判周围环境中物体的物理和/或化学属性。
44.在其中一个实施例中,如图1所示,第二摄像头612与伸缩支架610之间通过相机稳定器611连接。相机稳定器611与伸缩支架610之间转动副连接(如图2所示)。
45.在其中一个实施例中,如图1所示,还包括镜头支撑杆和重力块。镜头支撑杆垂直固定安装在相机稳定器611的相机安装座上。第二摄像头612设置在镜头支撑杆的顶端。重力块设置在相机安装座的背面,以降低第二摄像头612的重心,以及提高相机安装座相对于相机稳定器611的扭矩,从而使得镜头支撑杆保持竖直状态。矢量角度传感器613设置在伸缩支架610与相机稳定器611之间,用以获取相机稳定器611相对于伸缩支架610转动时的转角大小和转动方向。
46.在其中一个实施例中,如图1所示,还包括设置在载物机器人本体100四周的激光雷达130。激光雷达130用于获取载物机器人本体100与其周围障碍物之间的距离。
47.在其中一个实施例中,如图1或图2或图3所示,注水口211设置有橡胶封口,橡胶封口中间设置有通孔或十字贴刀,以便于注水时注水枪330插穿橡胶封口与净水箱210连通。吸污口221内设置有单向阀,吸污时吸污枪340插入吸污口221时会将单向阀往里抵,以使吸污枪340与污水箱220连通。
48.在其中一个实施例中,充电触头可伸缩。
49.在其中一个实施例中,水泵(图中未画出)和排污泵(图中未画出)与底座310固定
连接。
50.上述提供的一种用于清洗光伏电池板的智能机器人,通过在载物机器人本体100设置载物平台,并在载物平台上设置多关节机械臂300和若干充电柱150,然后将多个车载清洁机器人200穿插叠放在充电柱150上,需要清洁光伏电池板时,通过多关节机械臂300将多个车载清洁机器人200从充电柱150上取走并运送到待清洗的光伏板上,使得多个车载清洁机器人200能够同时分区域工作,当清洁完毕后,载物机器人本体100会将移动至已完成工作的车载清洁机器人200附近,通过多关节机械臂300将车载清洁机器人200逐个从光伏板上拿起套在充电柱150上垂直叠放。不仅非常高效,而且可由机器人自动完成,无需人工操作,即使在酷暑的极端天气也能随时完成光伏板的清洗工作,且由于不是采用水冲式清洗,水资源利用更充分,综合成本低。
51.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
52.以上实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1