定位机构、门碰与门碰组合的制作方法
1.本实用新型涉及定位装置技术领域,尤其涉及定位机构、门碰与门碰组合。
背景技术:
2.门吸也俗称门碰,用于吸住开启门页的一种定位装置,可防止风吹或碰触导致门页关闭。
3.目前,市面上绝大部分的门碰产品都采用磁吸式的,该类产品一直存在触碰异响过大、定门速度过快的缺陷,因此碰门时声音刺耳和门页惯性力大而震手,产品体验感欠佳一直被市场诟病。
4.当然,随着家居生活的不断提升,也有机械式的门碰面世,一定程度上克服了磁吸式的上述缺陷。但是,目前的机械式门碰的结构较复杂,零部件多,组装不方便,且外形大导致容易拌脚。
技术实现要素:
5.为了克服上述技术缺陷,本实用新型提供一种结构紧凑的定位机构,解决了该类机构产品结构复杂、体积较大的问题,还具有定位稳定、操控体验好的优点。
6.为了解决上述问题,本实用新型按以下技术方案予以实现的:
7.本实用新型所述定位机构,安装在载体上,可用于将外物定位于所述载体上,包括:
8.蓄能件,其储蓄势能后安装在所述载体上;
9.联动杆组件,其可转动地铰接在所述载体上;
10.锁定件,其与所述联动杆组件的一端铰接,且所述锁定件的顺、逆时针转动分别被限定了最大偏转角度;
11.其中,所述蓄能件与所述联动杆组件驱动连接,以释放势能并通过所述联动杆组件来驱使所述锁定件趋向转动至其中一个方向的所述最大偏转角处。
12.进一步的,所述锁定件的偏转范围中包括第一受力区和第二受力区;所述锁定件处于所述第一受力区时,被驱使趋向转动至顺时针的所述最大偏转角度;所述锁定件处于所述第二受力区时,被驱使趋向转动至逆时针的所述最大偏转角度。
13.在本实用新型的部分实施例中,所述锁定件可转动地铰接在所述载体上;所述联动杆组件包括:摇杆,其中部可转动地铰接在所述载体上;所述蓄能件与所述摇杆驱动连接;连杆,其一端与所述摇杆的一端铰接,其另一端与所述锁定件铰接。
14.进一步的,所述锁定件的偏转范围中包括第一受力区和第二受力区;所述摇杆与所述连杆的铰接轴心为第一轴心;所述锁定件与所述连杆的铰接轴心为第二轴心;所述锁定件与所述载体铰接的轴心为第三轴心;所述第一轴心、所述第二轴心和所述第三轴心处于同一直线上时,所述锁定件所处位置为所述第一受力区和所述第二受力区的交界处;所述锁定件处于所述第一受力区时,被驱使趋向转动至顺时针的所述最大偏转角度;所述锁
定件处于所述第二受力区时,被驱使趋向转动至逆时针的所述最大偏转角度。
15.在本实用新型的部分实施例中,所述摇杆与所述载体的铰接轴心为第四轴心;所述第一轴心至所述第四轴心为所述摇杆的第一摆臂;所述蓄能件与所述第一摆臂驱动连接,以驱使所述摇杆始终趋向逆时针转动。
16.在本实用新型的部分实施例中,所述蓄能件可采用具有弹性形变的弹性件。
17.在本实用新型的部分实施例中,还包括缓冲器,其与所述联动杆组件连接,用于减缓所述联动杆组件的转速。
18.进一步的,所述锁定件包括铰接部与锁定部,所述锁定部的形状与所述外物适配。
19.与现有技术相比,本实用新型的有益效果是:
20.利用蓄能件储蓄的势能,可转变为持续对联动杆组件施加的驱动力,以联动带动锁定件转动。锁定件在两个最大偏转角度之间的转动范围内,由于蓄能件始终驱动联动着锁定件,因此,在无大于所述驱动力的外力情况下,锁定件会被驱使转动至其中一个方向的最大偏转角度处,就会受力平衡而停止在该位置。
21.利用联动杆组件的杠杆结构,以及蓄能件持续输出驱动力,既能够在无外物施力的状态下,让锁定件自动复位并保持在顺时针的最大偏转角度处以待工;又能够在外物触发锁定件逆时针转动后,蓄能件的驱动力将助推锁定件转至逆时针的最大偏转角度处,外力撤销后仍然能够将外物定位在此时的锁定件中。外物锁定在该定位机构中或从该定位机构中挣脱,这两个过程施力不费劲,外物定位好之后,又有蓄能件的势能保持受力平衡以保障外物的定位稳定。
22.本实用新型还公开了一种门碰,其包括外壳与上述介绍的定位机构,所述外壳为所述载体,将上述介绍的定位机构安装于所述外壳内,既形成体积较小的门碰产品,又对定位机构的各个组件起到有效的保护作用。
23.本实用新型还公开了一种门碰组合,其包括停门柱与上述介绍的门碰,所述停门柱为所述外物。所述门碰可安装在门扇的其中一面,所述停门柱固定安装在门扇的行程中,利用所述门碰与所述停门柱的配合,可实现停门与自由门。且利用蓄能件的持续施加驱动力和联动杆组件的杠杆结构,在定门和挣脱转为自由门这两个操控动作,蓄能件的势能都有助推效果,使得用户拉门的手感好。
附图说明
24.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的实施例,对于本普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。其中:
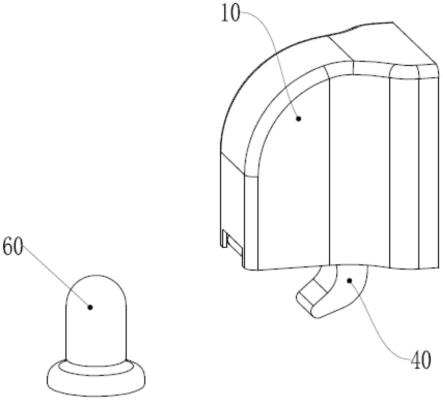
25.图1是本实用新型所述门碰组合一种实施例的结构示意图;
26.图2是图1所述的门碰组合的内部结构示意图;
27.图3是本实用新型所述锁定件位于所述顺时针转动的最大偏转角度的位置状态示意图;
28.图4是本实用新型所述停门柱与所述锁定件配合定位在所述逆时针转动的最大偏转角度的位置状态示意图;
29.图5是锁定件转动至所述第一受力区与所述第二受力区的交界处的位置状态示意图;
30.图6中的a1至a6依次是本实用新型所述门碰组合从自由门状态逐渐转变为顶门状态,再挣脱转为自由门状态的动态演变示意图;
31.图7是锁定件的转动范围示意图;
32.图8是本实用新型所述门碰的外壳结构示意图;
33.图中:
34.外壳10、底座11、上盖12、外罩13、限位凸起14;
35.蓄能件20、引脚21;
36.联动杆组件30、摇杆31、连杆32;
37.锁定件40、铰接部41、锁定部42;
38.缓冲器50、缸体51、阻尼杆52;
39.停门柱60;
40.第一轴心71、第二轴心72、第三轴心73、第四轴心74;
41.第一受力区a、第二受力区b、参考基准点h。
具体实施方式
42.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不能理解为对本实用新型的限制。
43.在本实用新型的描述中,需要理解的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
44.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
45.首先,需要说明的是:可以理解的,为了便于描述与理解,本实用新型中对各组件描述的顺、逆时针转动是以附图3所示的状态位置作为参考基准,将本实用新型所公开的技术及其产品设置于其他安装场景或仅是观察位置的变换,而使其顺、逆时针方向互换,但技术特征和技术原理本质相同或等同的技术方案均属于本实用新型的保护范围。
46.如图2~图6所示,本实用新型公开的定位机构,安装在载体上,可用于将外物定位于所述载体上。定位机构包括蓄能件20、联动杆组件30和锁定件 40;蓄能件20储蓄势能后安装在载体上;联动杆组件30可转动地铰接在载体上;锁定件40与联动杆组件30的一端铰接,且锁定件40的顺、逆时针转动分别被限定了最大偏转角度;其中,蓄能件20与联动杆组
件30驱动连接,以释放势能并通过联动杆组件30来驱使锁定件40趋向转动至其中一个方向的最大偏转角处。
47.利用蓄能件20储蓄的势能,可转变为持续对联动杆组件30施加的驱动力,以联动带动锁定件40转动。锁定件40在两个最大偏转角度之间的转动范围内,由于蓄能件20始终驱动联动着锁定件40,因此,在无大于所述驱动力的外力情况下,锁定件40会被驱使转动至其中一个方向的最大偏转角度处,才会受力平衡而停止在该位置。
48.为了便于理解,此处以如图3所示锁定件40所处的顺时针最大偏转角度处为例进行说明,此时,由于锁定件40被限定不能继续顺时针转动,联动杆组件 30与阻碍限定的结构分别对锁定件40施加的压力达到平衡,因此锁定件40能够保持停靠在该最大顺时针转动的位置。
49.此时,如果有外物对锁定件40施加外力,使锁定件40逆时针转动,联动杆组件30也会被带动转动,在联动杆组件30转过其杠杆受力的临界位置后,联动杆组件30上的驱动力将助推锁定件40继续逆时针转动,直至抵达最大的逆时针转动角度处(即例如图4所示的位置),即可借助锁定件40将施力的外物定位在载体的该位置处。
50.因此,利用联动杆组件30的杠杆结构,以及蓄能件20持续输出驱动力,既能够在无外物施力的状态下,让锁定件40自动复位并保持在顺时针的最大偏转角度处以待工;又能够在外物触发锁定件40逆时针转动后,蓄能件20的驱动力将助推锁定件40转至逆时针的最大偏转角度处,外力撤销后仍然能够将外物定位在此时的锁定件40中。外物锁定在该定位机构中或从该定位机构中挣脱,这两个过程施力不费劲,外物定位好之后,又有蓄能件20的势能保持受力平衡以保障外物的定位稳定。
51.可以理解的,本领域技术人员知晓可以设计不同的限位结构来实现“锁定件40的顺、逆时针转动分别被限定了最大偏转角度”,在未脱离本发明创造的其他内容的基础上,仅改变用于限制转动范围的限定结构所得的技术方案均属于本实用新型的保护范围。在此举例,如图2~5所示,可以在锁定件40的两侧分别设置限位凸起14,以限定锁定件40的转动范围,限位凸起14的具体位置可根据产品的订制而设定;又例如,也可以在锁定件40与联动杆组件30的铰接工位、或与载体的铰接工位处设置一定转动范围的避让槽与对应的限位部,以形成锁定件40有限的转动行程。
52.具体的,如图7所示,本实用新型的锁定件40在偏转范围中包括第一受力区a和第二受力区b,由于如上述解释的“联动杆组件30的杠杆结构”与“蓄能件20始终驱动联动着联动杆组件30”的连接结构,因此锁定件40处于第一受力区a时,被驱使趋向转动至顺时针的最大偏转角度;锁定件40处于第二受力区b时,被驱使趋向转动至逆时针的所述最大偏转角度。进一步的,可根据产品订制,还可设计成:锁定件40转动至第一受力区a与第二受力区b的交界处的位置时,锁定件40也会被驱使趋向转动至顺时针的最大偏转角度或逆时针的最大偏转角度,具体趋向转动到哪个方向的最大偏转角度处,可根据该定位机构安装于怎样的载体背景而定,但其杠杆原理不变,故可变化设计的具体结构方案均属于本实用新型的保护范围。
53.进一步说明的是:第一受力区a和第二受力区b是用于区分锁定件40在转动范围中不同位置的受力状态,即“锁定件40处于第一受力区a时,被驱使趋向转动至顺时针的最大偏转角度;锁定件40处于第二受力区b时,被驱使趋向转动至逆时针的所述最大偏转角度”。
为了便于描述与理解,上段对第一受力区a和第二受力区b的说明界定,是以如图7所示的位置进行举例说明,但不应该理解为是对它的限定。
54.进一步的,本实用新型的联动杆组件30及其与其他部件的连接关系,可参考以下方案:具体的,如图2~8所示,锁定件40可转动地铰接在载体上;联动杆组件30包括摇杆31和连杆32;摇杆31的中部可转动地铰接在载体上;蓄能件20与摇杆31驱动连接;连杆32的其中一端与摇杆31的一端铰接,连杆32 的另一端与锁定件40铰接。如此可实现:蓄能件20的势能直接释放在摇杆31 上,摇杆31受力会相对于载体以铰接点作为杠杆支点而转动,摇杆31的转动就会带动连杆32;连杆32就会驱使锁定件40相对于载体进行本实用新型所述的顺、逆时针转动。
55.基于上一段描述的联动杆组件30的结构及其连接关系,利用蓄能件20的作用来实现“驱使锁定件40趋向转动至其中一个方向的最大偏转角处”,具体实现方案可参考如下:
56.从驱动锁定件40转动的受力分析,为了便于理解,如图7所示,以锁定件 40靠近限位凸起14的某一点为参考基准点h,作转动范围的受力分析,依据该参考基准点h的转动范围示意图,可以理解锁定件40整体的转动范围。具体的,锁定件40的偏转范围中包括第一受力区a和第二受力区b;摇杆31与连杆 32的铰接轴心为第一轴心71;锁定件40与连杆32的铰接轴心为第二轴心72;锁定件40与所述载体铰接的轴心为第三轴心73;如图7(b2)所示,第一轴心 71、第二轴心72和第三轴心73处于同一直线上时,锁定件40所处位置为第一受力区a和第二受力区b的交界处;锁定件40处于第一受力区a时,被驱使趋向转动至顺时针的最大偏转角度,如图7(b1)所示,此时锁定件40转动至顺时针的最大偏转角度;锁定件40处于第二受力区b时,被驱使趋向转动至逆时针的最大偏转角度,如图7(b3)所示,此时锁定件40转动至逆时针的最大偏转角度。
57.进一步的,可根据产品订制,还可设计成:锁定件40转动至第一受力区a 与第二受力区b的交界处的位置时,锁定件40也会被驱使趋向转动至顺时针的最大偏转角度或逆时针的最大偏转角度,具体趋向转动到哪个方向的最大偏转角度处,可根据该定位机构安装于怎样的载体背景而定,但其杠杆原理不变,故可变化设计的具体结构方案均属于本实用新型的保护范围。例如如图7所示的技术方案中,锁定件40转动至交界处的位置时,锁定件40会被驱使趋向复位至顺时针的最大偏转角度处。
58.为了蓄能件20对摇杆31的施力稳定以及整体结构的紧凑,进一步的,摇杆31与载体的铰接轴心为第四轴心74;第一轴心71至第四轴心74为摇杆31 的第一摆臂;蓄能件20与该第一摆臂驱动连接,以驱使摇杆31始终趋向逆时针转动。蓄能件20对摇杆31的驱动力直接作用于第一摆臂上,驱动力的输出方向始终是驱使摇杆31趋向逆时针转动的方向,利用该驱动力输出结构作为基础,并结合连杆32两端的铰接结构、以及锁定件40铰接在载体上的结构,能够更好地将蓄能件20、联动杆组件30和锁定件40这三个重要组件联动连接起来,充分利用了空间,能够有效缩小载体产品的体积,且转动幅度都较小,不容易磨损。
59.为了缩小成本与整体结构的体积,蓄能件20可采用具有弹性形变的弹性件。例如可采用扭簧,扭簧被压缩弹性形变后如图2所示安装,扭簧的其中一个引脚21抵接在第一摆臂上,另一引脚21被限定不动。当然,也可采用其他结构的弹性件替换扭簧,其他结构的弹性件的安装连接方式参考本举例是显而易见的,均属于本实用新型的保护范围。
60.可以理解的,可根据外物定位在锁定件40后,锁定件40需要达到多少等级的防挣
脱强度来选装不同规格的蓄能件20,蓄能件20储蓄的势能越大,需要克服弹力挣脱锁定件40的外力就需要越大。
61.为了避免联动杆组件30和/或锁定件40在转动过程中,转速较快,本实用新型的定位机构还包括缓冲器50,其与联动杆组件30连接,用于减缓联动杆组件30的转速。由于联动杆组件30直接与锁定件40连接,因此,设置的缓冲器 50对联动杆组件30起到减缓转速的作用间接促使锁定件40不能高速转动,故当外物高速撞向锁定件40时,有缓冲器50的阻碍,使得锁定件40和联动杆组件30均不会由于高速转动撞到其他部位而发出刺耳异响,缓冲器50吸收了较大的外力,对各个组件也起到一定的有效保护,使用寿命更长。
62.进一步的,缓冲器50可采用阻尼器;阻尼器的阻尼杆52被压缩回缸体51 内时会受到阻尼力。为了紧凑优化载体产品的整体结构,具体的,摇杆31的另外一端(远离第一轴心71的那一端)与阻尼器的阻尼杆52铰接。进一步的,阻尼器的缸体51相对于载体也可转动,例如缸底铰接在载体上,使得各组件具备更灵活的转动性,各组件之间的连接不会出现卡死状态。
63.为了更好地将外物定位在锁定件40上,本实用新型的锁定件40包括铰接部41与锁定部42,锁定部42的形状与外物适配。具体的,锁定件40通过铰接部41分别与上述的连杆32和载体铰接,具体铰接位置可根据各组件的形状大小、载体空间、以及锁定件40在顺、逆时针方向上的转动范围来设定,使得整个锁定机构能够实现上述介绍的功能。另外,锁定部42的形状可设计成与外物相互适配的凹凸形状,例如可设计成如图2所示的旋勾状,弯钩处对适配的外物可形成有效的卡位,且外物脱离时,由于旋勾的形状磨损也减少。进一步的,旋勾可设计成如图2所示的形状,整个锁定件40为一个曲柄旋勾。
64.本实用新型还公开一种门碰,其包括外壳10与上述所介绍任意一种方案的定位机构,该外壳10为上述的载体。进一步的,如图8所示,外壳10可设计成包括底座11、上盖12和外罩13,上述的蓄能件20、联动杆组件30、锁定件 40和缓冲器50等组件紧凑地安装于底座11与上盖12之间,外罩13安装罩护于组装好的底座11与上盖12的外面,以形成一种结构紧凑、体积小、定门稳定、操作不费力的门碰。
65.本实用新型还公开一种门碰组合,其包括停门柱60与上述的门碰,停门柱 60为上述的外物。进一步的,停门柱60可设计成子弹状,锁定件40形状与之适配。一般情况下,门碰可安装在门扇的其中一面,停门柱60固定在门页的行程中,具体位置可自主设置。
66.该门碰组合的使用原理:
67.扭簧对第一摆臂始终施加弹力驱使摇杆31趋向逆时针转动;
68.首先,如图6(a1)所示,为自由门状态,锁定件40停靠在顺时针的最大偏转角度处,摇杆31受到的弹力间接对连杆32施加下压力,下压力方向为沿着连杆32的轴向方向,由于第三轴心73的铰接作用,因此连杆32与形成顺时针最大偏转角度的限位结构能够将锁定件40稳定于此;
69.然后移动门扇,如图6(a2)所示,当锁定部42的旋勾末端抵触到停门柱 60,门扇继续移动,锁定部42受到的外力克服扭簧的弹力,使得锁定件40逆时针转动;
70.如图6(a5)所示,锁定件40处于上述的第一受力区a的转动范围之内,连杆32对锁定件40的作用力都是驱使锁定件40趋向复位至顺时针的最大偏转角度处,即需要克服扭簧的弹力使锁定件40越出第一受力区a的范围,否则外力撤销时,在扭簧的弹力作用下,锁定
件40将会弹离停门柱60;
71.如图6(a3)所示,锁定件40转动到上述的第二受力区b的转动范围之内,连杆32对锁定件40的作用力都是驱使锁定件40趋向转动至逆时针的最大偏转角度处;即一旦外力克服弹力并使得锁定件40进入第二受力区b,这时弹力将助推锁定件40完成与停门柱60的适配定位,停门操作手感好,不费力,且杠杆受力使得停门稳定;
72.如图6(a4)所示,移动门扇直至锁定件40适配停门柱60停靠在逆时针转动的最大偏转角度处,实现停门;
73.如图6(a5)~6(a6)所示,从停门状态,反向拉动门扇,施力克服扭簧的弹力,锁定件40的另一侧的旋勾段抵靠停门柱60,锁定件40以第三轴心73为中心进行顺时针转动,从第二受力区b越进第一受力区a,就可脱离停门状态重新进入自由门状态,锁定件40就会自动恢复转动至顺时针转动的最大偏转角度处。
74.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,故凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1