一种小型多轴机器人跟踪拍摄系统的制作方法
1.本实用新型涉及拍摄设备的技术领域,具体涉及一种小型多轴机器人跟踪拍摄系统。
背景技术:
2.近年来随着自媒体事业的飞速发展,个人手机直播、手机摄影几乎是所有自媒体创业者的首选创作方式,拍摄出效果更好、更清晰、更具创意的视频一直是创作者们极力追求的;为了取得较好的直播与拍摄效果,绝大多数拍摄者都是对着手机镜头先调整好一个角度后,将手机固定在手机支架上,再开始拍摄,在拍摄的过程中拍摄者需要尽力保持某种姿势以求获取最佳的拍摄效果;这种方式对被拍摄的人或物的姿态有一定要求,尤其是面部的朝向角度需要长时间地保持在固定的位置,最佳的拍摄角度需要一直保持不变,适应性较差;还有一些利用简易的三轴机器人,通过在机器人末端安装手机支架,然后通过示教编程的方式让手机在某个时刻或者某段时间内沿设置好的拍摄点或者拍摄路径进行拍摄;这种拍摄方式只能沿着既定的位置路径或者点位进行拍摄,不具备跟踪拍摄以及姿态补偿功能;还有使用三轴云台稳定拍摄器,虽然手机或者摄像云台能够自动对焦,但是人脸部的位置及拍摄角度发生较大位置的变动时,拍摄出来的视频画面中人脸部的图像清晰度以及视频画面的占比会有较大程度的变化,这是由于自动对焦以及三轴云台只能实现固定点拍摄时姿态变化的补偿以及球面轨迹的跟踪,不具备拍摄点与被拍摄物的距离变化时的跟踪拍摄功能;因此,现亟需针对上述问题予以可靠的解决方案。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种小型多轴机器人跟踪拍摄系统,实现桌面级别的、低成本的跟踪拍摄系统的搭建。
4.为了解决上述技术问题,本实用新型提供了一种小型多轴机器人跟踪拍摄系统,包括:
5.机器人,所述机器人包括底座及安装在底座上的机械臂;
6.姿态补偿组件,所述姿态补偿组件安装在所述机械臂的末端;
7.安装架,所述安装架安装在所述姿态补偿组件的自由端,所述安装架用于安装拍摄器,所述机器人和姿态补偿组件联合驱动所述安装架在空间上移动,以带动拍摄器相对被拍摄物进行位置跟踪和姿态补偿。
8.作为本实用新型的进一步改进,所述机器人还包括动力箱,所述动力箱转动安装在所述底座上,所述动力箱驱动其相对底座转动,所述机械臂安装在所述动力箱上,所述动力箱驱动所述机械臂摆动。
9.作为本实用新型的进一步改进,所述机械臂包括第一摆臂和第二摆臂,所述第一摆臂的一端铰接在所述动力箱上,所述第二摆臂的一端铰接在所述第一摆臂的另一端上,所述安装架安装在所述第二摆臂的另一端上。
10.作为本实用新型的进一步改进,所述姿态补偿组件安装在连接座上,所述连接座铰接在所述第二摆臂的对应端部,所述动力箱驱动所述连接座摆动。
11.作为本实用新型的进一步改进,所述第一摆臂与动力箱铰接处的转动轴线、第一摆臂与第二摆臂铰接处的转动轴线、第二摆臂与连接座铰接处的转动轴线三者相互平行。
12.作为本实用新型的进一步改进,所述姿态补偿组件包括第一关节模块、第二关节模块、第三关节模块、第一异形连杆、第二异形连杆和第三异形连杆,所述第一关节模块固定在所述连接座上,所述第一异形连杆的一端通过圆形法兰与所述第一关节模块的驱动端连接,所述第一异形连杆的另一端固定有第二关节模块,所述第二关节模块的驱动端与第二异形连杆一端的圆形法兰连接,所述第二异形连杆的另一端固定有第三关节模块,所述第三关节模块的驱动端与第三异形连杆一端的圆形法兰连接,所述安装架安装在所述第三异形连杆的自由端上。
13.作为本实用新型的进一步改进,所述第一关节模块驱动端的转动轴线、第二关节模块驱动端的转动轴线、第三关节模块驱动端的转动轴线三者在空间上相交于一点。
14.作为本实用新型的进一步改进,所述第一关节模块、第二关节模块和第三关节模块三者的内部均设有编码器,所述编码器用于实时记录与反馈对应关节模块的运动状态。
15.作为本实用新型的进一步改进,所述底座上还安装有控制器,所述控制器用于控制所述姿态补偿组件的运动和机器人的运动。
16.作为本实用新型的进一步改进,所述拍摄器为手机,所述安装架用于夹持定位所述手机,该安装架包括主壳体及两个对称安装在主壳体两侧的夹紧块,所述夹紧块上固定有多根平行的导杆,所述夹紧块通过对应的导杆滑动安装在所述主壳体上,所述导杆上套装有驱动所述导杆向主壳体方向滑动的夹紧弹簧,所述夹紧弹簧位于所述主壳体的内部,每块所述夹紧块上还设有用于定位手机的定位槽。
17.本实用新型的有益效果:本实用新型是一种小型多轴机器人跟踪拍摄系统,首先,本实用新型解决了三轴拍摄云台只能进行姿态补偿跟拍的限制,将跟拍拓展到位置与姿态的同步补偿,能实现并达到更好的拍摄效果;其次,本实用新型解决了利用机器人搭载手机只能实现既定路线或者定点位拍摄的限制,本实用新型的拍摄系统具备主动跟踪拍摄的能力,利用本实用新型既可实现既定路线的拍摄,也可让拍摄系统根据被拍摄物体的状态自动进行拍摄位置与姿态的调节;再者,本实用新型的拍摄系统,结构简单小巧,无需额外的配置及外围设备,易于搬运和操作。
附图说明
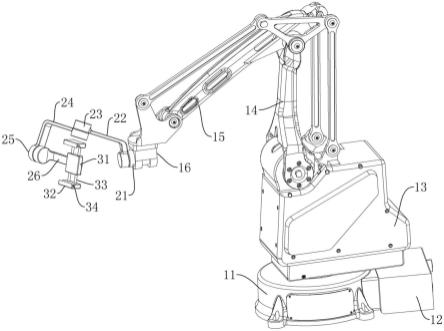
18.图1为本实用新型的立体结构示意图;
19.图2为姿态补偿组件(包括夹持在安装架上的手机)的立体结构示意图;
20.图3为姿态补偿组件的爆炸结构示意图;
21.图4为安装架的主视图;
22.图5为图4中a-a方向的剖视图;
23.图中标号说明:
24.11、底座;12、控制器;13、动力箱;14、第一摆臂;15、第二摆臂;16、连接座;21、第一关节模块;22、第一异形连杆;23、第二关节模块;24、第二异形连杆;25、第三关节模块;26、
第三异形连杆;31、主壳体;32、夹紧块;33、导杆;331、挡块;34、夹紧弹簧;35、定位槽;36、手机。
具体实施方式
25.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
26.参照图1-图5所示,本实用新型一种小型多轴机器人跟踪拍摄系统的一实施例;
27.一种小型多轴机器人跟踪拍摄系统,包括:
28.机器人,所述机器人包括底座11及安装在底座11上的机械臂;所述机器人为桌面三轴机器人,具有三个自由度,主要用于跟踪被拍摄物体的空间位移变化;
29.姿态补偿组件,所述姿态补偿组件安装在所述机械臂的末端;用于跟踪被拍摄物体的空间姿态变化;
30.安装架,所述安装架安装在所述姿态补偿组件的自由端,所述安装架用于安装拍摄器,所述机器人和姿态补偿组件联合驱动所述安装架在空间上移动,以带动拍摄器相对被拍摄物进行位置跟踪和姿态补偿。
31.在本实用新型的一具体实施例中,所述机器人还包括动力箱13,所述动力箱13转动安装在所述底座11上,所述动力箱13驱动其相对底座11转动,所述机械臂安装在所述动力箱13上,所述动力箱13驱动所述机械臂摆动,所述机械臂包括第一摆臂14和第二摆臂15,所述第一摆臂14的一端铰接在所述动力箱13上,所述第二摆臂15的一端铰接在所述第一摆臂14的另一端上,所述安装架安装在所述第二摆臂15的另一端上,所述姿态补偿组件安装在连接座16上,所述连接座16铰接在所述第二摆臂15的对应端部,所述动力箱13驱动所述连接座16摆动,所述第一摆臂14与动力箱13铰接处的转动轴线、第一摆臂14与第二摆臂15铰接处的转动轴线、第二摆臂15与连接座16铰接处的转动轴线三者相互平行。
32.在本实用新型的一具体实施例中,所述姿态补偿组件包括第一关节模块21、第二关节模块23、第三关节模块25、第一异形连杆22、第二异形连杆24和第三异形连杆26,每个关节模块均为一个独立的动力元件,所述第一关节模块21固定在所述连接座16上,所述第一异形连杆22的一端通过圆形法兰与所述第一关节模块21的驱动端连接,第一关节模块21驱动所述第一异形连杆22摆动,所述第一异形连杆22的另一端固定有第二关节模块23,所述第二关节模块23的驱动端与第二异形连杆24一端的圆形法兰连接,第二关节模块23驱动所述第二异形连杆24摆动,所述第二异形连杆24的另一端固定有第三关节模块25,所述第三关节模块25的驱动端与第三异形连杆26一端的圆形法兰连接,第三关节模块25驱动所述第三异形连杆26摆动,所述安装架安装在所述第三异形连杆26的自由端上。
33.在本实用新型的一具体实施例中,所述第一关节模块21驱动端的转动轴线、第二关节模块23驱动端的转动轴线、第三关节模块25驱动端的转动轴线三者在空间上相交于一点,姿态补偿组件具有三个自由度,主要用于跟踪被拍摄物体的空间姿态变化;所述第一关节模块21、第二关节模块23和第三关节模块25三者的内部均设有编码器,所述编码器用于实时记录与反馈对应关节模块的运动状态,所述底座11上还安装有控制器12,所述控制器12用于控制所述姿态补偿组件的运动和机器人的运动,具体来说,每个关节模块中内置的编码器用以实时记录与反馈姿态补偿组件末端的姿态,每个关节模块的都通过线缆与控制
器12连接,控制器12具有读取机器人关节数据、姿态补偿组件中关节模块数据以及驱动它们运动的功能,同时控制器12通过数据线或者无线传输的模式能实时与手机36进行数据通信,读取手机36拍摄的图片或者画面帧,并通过图像处理给出控制指令,进而驱动机器人关节以及姿态补偿组件的关节模块运动。
34.在本实用新型的一具体实施例中,所述拍摄器为手机36,所述安装架用于夹持定位所述手机36,该安装架包括主壳体31及两个对称安装在主壳体31两侧的夹紧块32,所述夹紧块32上固定有多根平行的导杆33,所述夹紧块32通过对应的导杆33滑动安装在所述主壳体31上,所述导杆33上套装有驱动所述导杆33向主壳体31方向滑动的夹紧弹簧34,具体来说,导杆33的里端设有挡块331,所述夹紧弹簧34的两端分别抵接在所述挡块331和主壳体31的内侧面上,所述夹紧弹簧34位于所述主壳体31的内部,每块所述夹紧块32上还设有用于定位手机36的定位槽35,在夹紧弹簧34的弹力作用下,手机36被夹紧在两个夹紧块32之间,且手机36被定位在夹紧块32的定位槽35上。
35.本实用新型在使用时,以手机36为拍摄器为例,手机36通过数据线或者无线传输模式与控制器12进行实时通信,控制器12实时获取手机36拍摄图像或者直播画面帧,通过提取图像拍摄特征点进行实时图像比对,根据图像比对的结果对机器人的关节以及姿态补偿组件的各关节模块进行驱动控制;
36.①
当被拍摄的物体以及拍摄特征面垂直于手机36镜头且在一定范围内沿着球面轨迹运动时,通过驱动姿态补偿组件的3个关节模块进行拍摄姿态跟踪,当跟踪拍摄的图像特征点与被拍摄物体姿态变动前的图像特征点重合时,判定为姿态跟踪到位。
37.②
当被拍摄的物体以及拍摄特征面垂直于手机36镜头且在一定范围内沿着平移轨迹运动时,姿态补偿组件保持不变,通过驱动机器人运动进行拍摄位置跟踪,当跟踪拍摄的图像特征点与被拍摄物体姿态变动前的图像特征点重合时,判定为位置跟踪到位。
38.③
当被拍摄物体位置以及拍摄特征面由垂直状态发生改变时,采用混合驱动控制方式,先驱动机器人进行初步位置跟踪,然后驱动姿态补偿组件进行姿态补偿,然后根据连续图像特征比对结果进行不断地位置修正以及姿态补偿,图像特征点对比结果不断收敛,最终达到与物体位置与姿态变化以前拍摄图像的特征点重合时,判定姿态跟踪到位。
39.④
跟踪失败设定,当被拍摄物体移动距离过大或者拍摄特征面发生较大角度的变化,会超出机器人的运动空间或者姿态补偿组件的转角空间,故而对机器人以及姿态补偿组件进行跟踪距离,角度限定,当超出跟踪范围时,判定跟踪失败。
40.以上所述实施例仅是为充分说明本实用新型而所举的较佳的实施例,本实用新型的保护范围不限于此。本技术领域的技术人员在本实用新型基础上所作的等同替代或变换,均在本实用新型的保护范围之内。本实用新型的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1